")
MECÂNICA E MOTORES
JOÃO CARLOS DE SOUZA MAIA
RESISTÊNCIA PASSIVAS(1)
1. INTRODUÇÃO
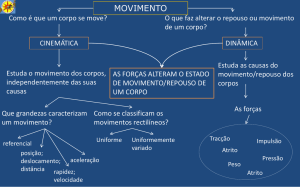
O estudo dos mecanismos que provocam movimentação são compostos
basicamente por 2(dois) tipos de forças: as forças motoras que permitem ao corpo o
movimento e as forças de resistência a esse movimento.
A resistência passiva se caracteriza como sendo uma força ou conjunto de
forças que se opõem ao movimento de um corpo.
A resistência passiva passa então a ter importância fundamental nos
mecanismos que geram trabalho uma vez que é responsável pela dissipação de energia
causando assim, redução no rendimento energético das máquinas motoras.
Em determinadas situações, a resistência passiva é considerada desprezível
porque o seu efeito sobre o movimento dos corpos em contato é muito pequeno. Forças
como o ar atmosférico, a rugosidade e a deformabilidade das superfícies de contato
são alguns exemplos de resistências ao movimento de um corpo.
2. PRINCIPAIS RESISTÊNCIAS PASSIVAS
As principais resistências passivas são:
a) Resistência ao escorregamento ou ao deslizamento
b) Resistência ao rolamento
c) Resistência ao enrolamento e desenrolamento
d) Resistência ao meio.
_________________________
João Carlos de Souza MAIA – Engenheiro Agrônomo, Doutor em Engenharia Agrícola e ProfessorAdjunto do Departamento de Solos e Engenharia Rural da Faculdade de Agronomia e Medicina
Veterinária da Universidade Federal de Mato Grosso.
MECÂNICA E MOTORES
JOÃO CARLOS DE SOUZA MAIA
a) RESISTÊNCIA AO ESCORREGAMENTO ou DESLIZAMENTO
A resistência ao escorregamento ou ao deslizamento é caracterizada como
forças contrárias ao movimento que se originam em função da rugosidade das
superfícies em contato.
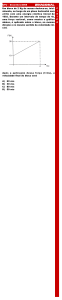
Considerando um corpo apoiado sobre uma superfície plana (figura 1) e
levando em consideração o princípio geral da dinâmica, esse corpo deveria manter-se
em movimento uniforme sem necessidade de fornecer-lhe energia ou força
(PROVENZA, 1984).
F
corpo
fa
plano
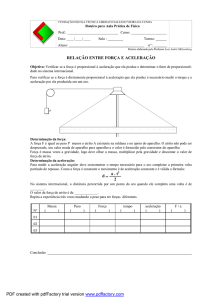
Figura 1 – Representação do atrito ao
deslizamento
Para entrar em movimento, ao corpo deverá ser aplicada uma força de tal
forma que vença a resistência ao escorregamento deste corpo sobre a superfície. Essa
força é conhecida como força de atrito.
Coulomb e Marin citados por PROVENZA(1984) concluíram que:
a) A força de atrito é sempre contrária ao movimento.
b) A força de atrito só existe se o corpo estiver ou tender a se por em movimento
c) O deslocamento de um corpo é mais difícil no início que durante o movimento.
A força de atrito é proporcional à força peso do corpo quando atua sobre uma
superfície. Assim, pode-se afirmar que:
f a N .........................................[1]
onde:
fa = força de atrito [kgf];
N = força normal [kgf];
- coeficiente de proporcionalidade ou coeficiente de atrito.
A força de atrito depende da natureza dos corpos em contato e do grau de
acabamento das superfícies em contato e do estado de lubrificação dos mesmos.
MECÂNICA E MOTORES
JOÃO CARLOS DE SOUZA MAIA
A força de atrito independe da velocidade relativa das superfícies em contato
sempre que a velocidade não ultrapassar a 4 m/s e da extensão das superfícies em
contato desde que a pressão entre elas não for superior a 0,5 Kg/mm2.
tg ........................................[2]
onde;
- ângulo de atrito interno [graus, ...]
A força de atrito para dois corpos em repouso varia em função do tempo que eles
permaneceram em contato ou seja, a força de atrito no início do movimento é maior
que a força de atrito durante o movimento. Por causa disso, o atrito pode se dividir
em:
a) atrito estático, quando o corpo está parado ou em início de movimento.
Quando se fala em atrito de escorregamento como força capaz de dificultar o
movimento de um corpo sobre uma superfície, subentende-se que o atrito seja
dinâmico.
O atrito, de acordo com a superfície de contato ainda pode ser:
a) Seco: quando não existe entre as superfícies nenhum outro elemento ou substância.
O contato entre as superfícies é direto.
Neste caso, o coeficiente de atrito depende dos materiais e do estado das superfícies
em contato.
b) Fluido: quando entre as superfícies dos corpos em contato, existe um líquido ou
fluido. Essa substância passa a preencher os espaços vazios entre as superfícies com a
finalidade de diminuir ou eliminar atrito. Dá-se o nome de lubrificação, a esse
processo.
Neste caso o coeficiente de atrito independe dos materiais e do acabamento das
superfícies em contato, passando a depender da viscosidade do lubrificante.
c) Semi-fluido: quando entre as superfícies em contato pode existir, em determinado
momento a presença de fluido, caracterizando assim um processo misto de
lubrificação.
O coeficiente de atrito, em superfícies consideradas bem lubrificadas,
assume valores na ordem de = 0,05. Em geral para a maioria das forças que compõe
as máquinas, o coeficiente de atrito é = 0,1.
MECÂNICA E MOTORES
JOÃO CARLOS DE SOUZA MAIA
O coeficiente de atrito independe da força de reação. Para baixas pressões
(até 10 Kg/mm2), não depende de N. Para pressões superiores a 10 Kg/mm2, passa
a depender de N.
O coeficiente de atrito () pode ser estático ou cinético. Estático é a razão
da força limite de atrito pela força normal, quando o corpo está a ponto de iniciar o
deslizamento. Cinético é a razão da força de atrito pela força normal, quando o corpo
está animado por uma velocidade constante.
Força de atrito estático entre dois corpos é a força tangencial que se opõe ao
deslizamento de um corpo em relação ao centro.
Força limite de atrito, é o valor máximo da força de atrito estático que
ocorre quando o corpo tende a se movimentar.
Força de atrito cinético é a força tangencial que procura impedir o movimento
do corpo. A força de atrito cinético é menor que o atrito estático.
O coeficiente de atrito não depende da força normal mas a ela é proporcional.
Para pressão até 10 Kg/mm2, o coeficiente u não depende da força normal (N). para
pressões acima de 10 Kg/mm2, o coeficiente u passa a depender de N.
O coeficiente de atrito dinâmico não depende da velocidade desde que esta
não assuma valores muito elevados.
O coeficiente de atrito não depende da área das superfícies de contato.
O coeficiente de atrito depende dos materiais em contato e do estado de
polimento de suas superfícies.
b) RESISTÊNCIA AO ROLAMENTO
É a resistência que se opõe ao rolamento de um corpo cilíndrico ou esférico
sobre uma superfície. É possível que tal resistência provenha de uma depressão
causada pela pressão de um corpo sobre o outro que faz mudar de um determinado
ponto para uma possível área de contato.
O atrito de rolamento, representado na figura 2, suporta uma carga F sobre o
eixo e uma força P está aplicada para produzir rolamento. A deformação da roda e da
superfície de suporte está representada pela área hachuriada . A distribuição da
pressão p sobre a área de contato é similar à indicada e a resultante R dessa
distribuição atuará em algum ponto A e passará pelo centro da roda, para haver
equilíbrio. A força P, necessária para iniciar e manter o rolamento, pode ser
encontrada igualando-se a zero a soma dos momentos de todas as forças, em torno de
A. A equação 3 representa essa situação:
P
a
L ....................................................[3]
r
MECÂNICA E MOTORES
JOÃO CARLOS DE SOUZA MAIA
sendo r o braço de alavanca de P e fr o coeficiente de atrito ao rolamento que é a
relação entre a força resistente e a carga normal, tem-se a seguinte equação:
P f r L .................................................[4]
P
r O
r
L
Figura 1 – Representação das forças envolvidas no movimento de uma roda
Podemos afirmar que a resistência de atrito ao rolamento:
a) depende da deformabilidade dos dois corpos em contato. Convém usar superfícies
duras;
b) É proporcional à força normal que atua entre o rolo e a superfície. Convém usar
muitos rolos;
c) É inversamente proporcional a distância entre o rolo e a superfície. Convém usar
rolos de grandes diâmetros.
Q
O
v
v
O
s
P
s
P
Figura 2 – Movimento de uma roda, sem deslizamento.
MECÂNICA E MOTORES
JOÃO CARLOS DE SOUZA MAIA
O centro de massa O move-se para frente a uma velocidade constante v. O
ponto P, onde a roda e o chão estão em contato, também se move para a frente com
velocidade v, de modo que ele está situado sempre debaixo do ponto O.
Durante um intervalo de tempo t vê-se os pontos O e P moverem-se para a
frente, percorrendo uma distância s, o que corresponde ao arco descrito na segunda
roda (P-Q).
A equação 5, relaciona o comprimento do arco s com o ângulo de rotação .
s R ...............................................[5]
onde R é o raio. A velocidade linear v do centro da roda é dada por:
O atrito
v R ...........................................[6]
Se a roda girar com velocidade constante, como mostra a figura 2, não haverá
tendência de ocorrer deslizamento no ponto de contato P e, deste modo, nenhuma
força de atrito atuará sobre a roda naquele ponto. No entanto, se uma força for
aplicada sobre a roda alterando a velocidade v do seu centro de massa ou a velocidade
angular em torno do centro, então haverá a tendência de ocorrer deslizamento da
roda em P e uma força de atrito agirá sobre a roda no ponto de contato, opondo-se
àquela tendência. Até que a roda comece realmente a deslizar, atuará sobre ela uma
força de atrito estático fe. Se a roda começar a deslizar, passará a atuar sobre ela
uma força de atrito cinético fc.
O
fe
P
Mg
Figura 3 – Roda desce girando um plano inclinado
Na figura 3, a roda desce em um plano inclinado. O peso Mg atua no seu
centro de massa. Como a força Mg não possui braço de alavanca em relação ao centro
MECÂNICA E MOTORES
JOÃO CARLOS DE SOUZA MAIA
da roda, ela não pode exercer torque em torno do centro e, deste modo, não pode
fazer com que a roda inicie uma rotação. Entretanto, como Mg tende a fazer a roda
deslizar sobre o plano inclinado, uma força de atrito atua sobre a roda em P, a parte
que está em contato com o plano, opondo-se ao deslizamento. Esta força, que aponta
para cima ao longo do plano inclinado, possui um braço de alavanca que é o raio da
roda. Deste modo, esta força de atrito produz um torque em torno do centro e faz
com que a roda entre em rotação.
O
P
fe
Figura 4 – Roda girando cada vez mais rápido
Na figura 4, faz-se com que a roda gire cada vez mais rápido à medida que
rola sobre uma superfície plana, como ocorre com uma bicicleta ao ser acelerada. O
acréscimo no valor de tende a fazer com que a parte inferior da roda deslize para a
esquerda. Uma força de atrito, cujo sentido aponta para a direita, atua sobre a roda
em P, opondo-se à tendência ao deslizamento.
R
Mgsen
P
Mgcos
Mg
Figura 5 – Principais forças que atuam em um corpo esférico rolando em uma rampa
Um corpo esférico, uniforme, de raio R, desce rolando um plano inclinado. As
forças que atuam sobre ele são o peso Mg, a força normal N e uma força de atrito fa.
")