Universidade Federal do Rio de Janeiro
Princípios de Instrumentação Biomédica
Módulo 5
Heaviside
Dirac
Newton
Conteúdo
5 - Circuitos de primeira ordem..................................................................................................1
5.1 - Circuito linear invariante de primeira ordem – resposta a excitação zero.....................1
5.1.1 - O circuito RC (resistor-capacitor)..........................................................................1
5.1.2 - O circuito RL (resistor-indutor)..............................................................................3
5.2 - Circuito linear invariante de primeira ordem – resposta ao estado zero........................4
5.3 - Linearidade da resposta ao estado zero..........................................................................7
5.4 - Invariância com o tempo................................................................................................8
5.5 - Circuito linear invariante de primeira ordem – resposta completa................................8
5.6 - Generalização...............................................................................................................11
5.6.1 - Resposta a excitação zero.....................................................................................11
5.6.2 - Resposta ao estado zero........................................................................................11
5.7 - Exercícios.....................................................................................................................12
5 Circuitos de primeira ordem
5.1 Circuito linear invariante de primeira ordem – resposta a excitação zero
5.1.1 O circuito RC (resistor-capacitor)
O circuito abaixo mostra um capacitor sendo carregado por uma fonte de tensão
constante. Em t=0 a chave S1 abre e a chave S2 fecha.
Para t≥0 ,
i C t i R t=0
dv C −v R
C⋅
=
e v C 0=v 0
dt
R
Como
v C =v R=v
{
{
dv v
C⋅ =0
dt R
v 0=v 0
dv −1
=
⋅v
dt R⋅C
v 0=v 0
Esta é uma equação diferencial ordinária de primeira ordem, linear, homogênea com
coeficientes constantes cuja solução geral é
Princípios de Instrumentação Biomédica – COB781
1
S 0⋅t
v t =K⋅e ⋅ut
onde
S 0=−
1
e K =v 0=v 0
R⋅C
−1
⋅t
v 0 R⋅C
dv
i C t =C⋅ =− ⋅e ⋅u t
dt
R
Esta resposta é chamada de resposta a excitação zero (sem excitação) e apresenta
solução que depende das características do circuito ( S 0 só depende da topologia) e das
condições iniciais do circuito (K depende das condições iniciais). A solução da equação
diferencial de primeira ordem linear é uma função linear do estado inicial do problema.
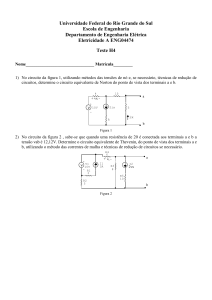
A curva exponencial que corresponde a resposta deste problema é apresentada na
figura abaixo. Nesta figura v 0=1 e R⋅C =1 . Observa-se que a reta que passa pelas
coordenadas t=0 e v=v(0) e apresenta inclinação igual a derivada da função no ponto t=0
cruza o eixo do tempo em um valor igual ao do produto R⋅C . Este produto é chamado
−1
constante de tempo τ e corresponde a S 0 . Toda exponencial unitária apresenta 37% de seu
valor inicial em 1⋅ , 14% para 2⋅ , 5% para 3⋅ , 2% para 4 ̇ e 0,5% para 5⋅ .
Princípios de Instrumentação Biomédica – COB781
2
A constante de tempo tem unidade de tempo (segundos) e corresponde a freqüência
natural do circuito. Um circuito RC com apenas um capacitor equivalente e um resistor
equivalente sempre apresenta constante de tempo da forma de um produto RC.
5.1.2 O circuito RL (resistor-indutor)
O circuito abaixo mostra um indutor sendo carregado por uma fonte de corrente
constante. Em t=0 a chave S1 troca de posição e a chave S2 fecha.
Para t≥0
v L v R=0
L⋅
{
di L
R⋅i L =0 e i L 0=I 0
dt
di
R
=− ⋅i
dt
L
i L 0= I 0
Esta é uma equação diferencial de primeira ordem, homogênea, linear de parâmetros
constantes cuja solução, de forma semelhante ao problema do circuito RC, é
i L t =I 0⋅e
−R
⋅t
L
⋅u t
Esta solução também depende das condições iniciais do problema ( I 0 ) e da topologia
do circuito (constante de tempo). Neste caso a constante de tempo é definida como
=
L
R
Princípios de Instrumentação Biomédica – COB781
3
que também apresenta unidade de tempo (segundos).
5.2 Circuito linear invariante de primeira ordem – resposta ao estado zero
Para o circuito abaixo a chave S1 abre em t=0
Para t≥0
i C i R =i S
dv v
C⋅ =i S t e v 0=0
dt R
Esta é uma equação diferencial de primeira ordem, linear, não homogênea (com
excitação) e condição inicial nula (estado zero).
A equação diferencial em questão deve satisfazer outras duas condições impostas pelo
circuito:
para t=0 +
dv i S
= (condição imposta pela topologia do circuito)
dt C
para t=∞
v= R⋅i S t (condição imposta pela fonte)
A solução para a equação diferencial linear não homogênea pode ser obtida pela soma
da solução homogênea e de uma solução particular que apresenta o mesmo formato da
excitação, assim v completa =v hv p . A solução homogênea depende das condições iniciais do
Princípios de Instrumentação Biomédica – COB781
4
problema e da sua topologia e a solução particular depende da excitação. Algumas vezes a
resposta particular é chamada de resposta forçada pois é imposta pela excitação.
Para o exemplo em questão
v t =K 1⋅e
−1
⋅t
R⋅C
R⋅i S t , para t≥0 .
sendo que K 1 pode ser calculado pela condição inicial do problema
v 0= K 1R⋅i S t =0
K 1=−R⋅i S t ,
logo
−1
v t =R⋅i S t⋅ 1 – e R⋅C
⋅t
Se a excitação fosse senoidal a resposta forçada seria senoidal, se a excitação fosse
uma exponencial a resposta forçada seria uma exponencial e assim por diante.
Exemplo:
Se
i S t =A1⋅cos ⋅t1 =A ' 1⋅cos ⋅t A ' ' 1⋅sen ⋅t
então
v p t= A2⋅cos ⋅t2 =A ' 2⋅cos ⋅t A' ' 2⋅sen ⋅t
dv v
C⋅ =A ' 1⋅cos ⋅t A ' ' 1⋅sen ⋅t
dt R
−1
⋅t
v t =K 1⋅e R⋅C A' 2⋅cos ⋅t A' ' 2⋅sen ⋅t , para t≥0
v 0= K 1 A' 2⋅cos 0=K 1 A' 2=0
K 1=−A' 2
Após o fim do transitório (a exponencial decrescente), o problema restringe-se a
Princípios de Instrumentação Biomédica – COB781
5
dv
v
C⋅ p p =A ' 1⋅cos ⋅tA ' ' 1⋅sen ⋅t
dt
R
como v p t= A' 2⋅cos ⋅t A ' ' 2⋅sen ⋅t
então
C⋅⋅[−A ' 2⋅sen ⋅t A' ' 2⋅cos ⋅t ]...
[ A' 2⋅cos⋅t A' ' 2⋅sen ⋅t]
...
=A ' 1⋅cos ⋅t A ' ' 1⋅sen ⋅t
R
agrupando os termos em seno e os termos em cosseno podemos montar duas equações:
para senos: −C⋅⋅A' 2
A' ' 2
= A' ' 1
R
para cossenos: C⋅⋅A' ' 2
A '2
=A ' 1
R
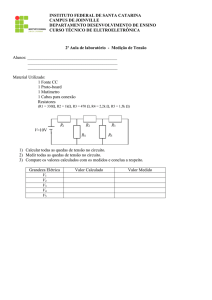
A figura abaixo foi produzida com R=1 , C=1F , A1=0 e 1=−900 . A resposta
completa é a soma da exponencial (resposta homogênea) com o cosseno defasado (resposta
particular). A influência da exponencial desaparece depois de 5 constantes de tempo por isso a
resposta homogênea é chamada de resposta transitória ao passo que a resposta particular é
chamada de resposta em regime permanente.
Princípios de Instrumentação Biomédica – COB781
6
5.3 Linearidade da resposta ao estado zero
É uma propriedade de qualquer circuito linear que a resposta ao estado zero é uma
função linear da excitação, isto é, a dependência da resposta ao estado zero com a forma de
onda da excitação é expressa por uma função linear. Se o símbolo Z t0 for utilizado para
representar uma rede no estado zero então a linearidade é obtida se forem satisfeitas as
seguintes condições.
Z t0 i 1i 2 =Z t0 i 1 Z t0 i 2
Z t0 k⋅i 1=k⋅Z t0 i 1
Para uma determinada rede, v 1 é a resposta a excitação com uma fonte i 1 t tal que
dv 1 v 1
C⋅ =i 1 t com v 1 0=0
dt R
e v 2 é a resposta para uma excitação i 2 t de tal forma que
dv v
C⋅ 2 2 =i 2 t com v 2 0=0 .
dt R
A soma das duas equações resulta em
dv 1
dv 2 v 1 v 2
C⋅ C⋅ =i 1 t i 2 t
dt
dt R R
ou seja
d v 1v 2 1
C⋅
⋅v 1v 2 =i 1 t i 2 t com v 1 0v 2 0=0
dt
R
o que satisfaz a primeira condição para linearidade.
Caso a fonte i 1 t seja multiplicada por por um determinado valor k então
Princípios de Instrumentação Biomédica – COB781
7
d k⋅v 1 k⋅v 1
C⋅
=k⋅i 1 t com k⋅v1 0=0
dt
R
Assim as duas condições para linearidade são satisfeitas se a rede estiver no estado
zero mesmo que R e C forem variantes com o tempo.
5.4 Invariância com o tempo
Seja uma rede linear invariante excitada por uma corrente i 1 e cuja resposta ao estado
zero seja v 1 tal que
dv 1 v1
=i .
dt 1
Agora, supondo que a excitação mude para i 1 t−T1 , então a resposta ao problema é
v 1 t−T1 tal que
dv 1 t−T1 v 1 t−T1
=i 1 t−T1
dt
cuja solução é idêntica a da equação
dy y
=x onde
dt
y=v 1 t−T1 e x=i 1 t−T1 com v 1 0−T1=0 .
Isto significa que em uma rede invariante a resposta ao estado zero é deslocada T1
segundos se a entrada estiver deslocada T1 segundos.
5.5 Circuito linear invariante de primeira ordem – resposta completa
Para os casos onde haja condição inicial não nula e excitação diferente de zero a
resposta da equação diferencial corresponde a soma da resposta a excitação zero mais a
resposta ao estado zero. Isto pode ser demonstrado se as equações para o caso de excitação
Princípios de Instrumentação Biomédica – COB781
8
zero e estado zero forem analisadas separadamente e em conjunto. Separadamente estas
equações são
dv v
C⋅ I I =0 (equação para o circuito RC com excitação zero)
dt R
dv
v
C⋅ O O =i S t (equação para o circuito RC com estado zero)
dt
R
onde v I e v O são as respostas a excitação zero e ao estado zero respectivamente.
Somando as equações temos
dv v
dv
v
C⋅ I I C⋅ O O =i S t
dt R
dt
R
que pode ser reescrita como
d v I v 0 v I v 0
C⋅
=i S t .
dt
R
Por esta razão a soma das respostas separadas corresponde a solução para o problema
completo.
v C t=v I tv O t , para t≥0 .
v C t=v 0⋅e
−1
⋅t
R⋅C
R⋅i S⋅ 1 – e
−1
⋅t
R⋅C
.
Esta resposta completa também pode ser obtida pela soma da resposta transitória e da
resposta em regime permanente.
v C t=v transitoria t v permanente t
−1
⋅t
v C t=v 0 – R⋅i S ⋅e R⋅C R⋅i S t , para t≥0 .
Se a excitação é um degrau ou um impulso a resposta sempre terá o formato
Princípios de Instrumentação Biomédica – COB781
9
sol t=sol ∞−[sol ∞−sol 0]⋅e
−t
onde sol corresponde a solução do problema (corrente ou tensão) e é a constante de
tempo do circuito, seja ele RC ou RL.
Exemplo: Determinar a equação da tensão sobre o capacitor da figura abaixo. A chave
S1 abre para t=0 e a chave S2 fecha para t=R1⋅C .
para t≤0
v C =0
para 0≤t≤R1⋅C
v C 0=0
v C ∞=R1⋅I
v C =R1⋅I⋅ 1 – e
−t
R1⋅C
para t=R1⋅C=T1
v C T1=R1⋅I1⋅ 1−
v C ∞= I⋅
2 =C⋅
R1⋅R2
R1 R2
R1⋅R2
R1 R2
1
e
Princípios de Instrumentação Biomédica – COB781
10
v C t=v C T1⋅e
−t −T1
2
vC ∞⋅ 1 – e
v C t =v C ∞−[v C ∞−v C T1]⋅e
−t – T1
2
−t −T1
2
=v excitação zerov estado
zero
=v permanente v transitória
5.6 Generalização
5.6.1 Resposta a excitação zero
A resposta a excitação zero é a resposta do circuito quando a excitação é nula. Assim a
equação diferencial que descreve o sistema é
dn y
d n−1 y
a
⋅
...a n⋅y=0
1
dt n
dtn −1
O polinômio característico desta equação é
s na 1⋅s n−1...a n−1⋅sa n=0
e as raízes deste polinômio são as chamadas freqüências naturais da variável de rede y.
Se todas as raízes forem distintas então
n
y t=∑ k i⋅e s ⋅t
i
i =1
onde as constantes ki são determinadas pelas condições iniciais. Se alguma das raízes
coincidirem então a resposta deve ser reescrita levando-se em conta os termos com potência
de t adequadas.
5.6.2 Resposta ao estado zero
A resposta ao estado zero é da forma
n
y t=∑ k i⋅e s ⋅t y p t
i
i =1
Princípios de Instrumentação Biomédica – COB781
11
onde yp é uma solução particular que depende da excitação w e, por conveniência,
podem ser escolhidas de acordo com a tabela abaixo. As constantes ki são obtidas pelas
condições iniciais.
Função forçada
Solução assumida
K
A
K⋅t
A⋅t B
K⋅t 2
A⋅t 2 B⋅tC
K⋅sen⋅t
A⋅sen ⋅tB⋅cos ⋅t
K⋅e−a⋅t
−a⋅t
A⋅e
5.7 Exercícios
1) Um circuito RC série no qual entra uma onda quadrada está representado na figura a
seguir. A entrada é formada por um trem periódico de pulsos com uma amplitude de 10V e
uma largura de 1ms, sendo cada pulso gerado a cada 2ms. A constante de tempo do circuito é
de 0,1ms. Calcule a tensão sobre o capacitor v C e o resistor v R . Quando a fonte V é
considerada entrada e a saída corresponde a v C o circuito é chamado de passa baixas e
quando a saída é v R o circuito é chamado passa altas. Qual seria a razão para estes nomes?
Transformando o circuito Thévenin em um equivalente Norton e resolvendo o
problema
dv
v v
− C C⋅ C
R R
dt
Princípios de Instrumentação Biomédica – COB781
12
dv C
v
v
C =
dt R⋅C R⋅C
onde R⋅C =constante de tempo==0,1 ms
1
− ⋅t
v C =k 1⋅e
k 2
Para os 0,1ms onde v=10V
v C ∞=10V
1
− ⋅t
v C t=[ vC 0−10]⋅e
10
a tensão chega a 10V em 0,5ms (5 constante de tempo)
Para os 0,1ms onde v=0V
v C ∞=0V
1
− ⋅t
v C t=10⋅e
a tensão chega a 0V em 1,5ms.
Do segundo pulso em diante
1
− ⋅t
v C t=−10⋅e
1
− ⋅t
v C t=10⋅e
10 (considerando que t=0 quando a fonte muda para 10V)
(considerando que t=0 quando a fonte muda para 0V)
Fazendo o gráfico destas funções observa-se que o desenho se parece com a onda
quadrada da entrada porém apresenta as bordas arredondadas. As bordas são mudanças
rápidas associadas a altas frequências. Os patamares, que não mudam, estão associados as
baixas frequências. Por esta razão este circuito é chamado de passa baixas (passa baixas
frequências).
Princípios de Instrumentação Biomédica – COB781
13
v R t =v−vC t
1
− ⋅t
v R t =10⋅e
(considerando que t=0 quando a fonte muda para 10V)
1
− ⋅t
v R t =10−10⋅e
(considerando que t=0 quando a fonte muda para 0V)
Fazendo o gráfico destas funções percebe-se que o desenho mantém as bordas da onda
quadrada mas “zera” as partes constantes. Por esta razão este circuito é chamado de passa
altas (passa altas frequências).
V(V1,C1) – tensão sobre o resistor
2) Considere o circuito linear invariante mostrado na figura abaixo. Seja v C 0=1V e
V =30⋅cos 2 ̇⋅1000⋅t ⋅u tV . Calcular a corrente do circuito para t≥0 . Determinar se há
alguma condição inicial para o capacitor e/ou fase para o sinal V tal que a resposta transitória
seja nula.
Princípios de Instrumentação Biomédica – COB781
14
dv v [ A' 1⋅cos ⋅t A ' ' 1⋅sen ⋅t ]
C⋅ =
dt R
R
onde =2⋅⋅1000 , A ' 1=30 e A ' ' 1=0
−1
⋅t
v t =K 1⋅e R⋅C A' 2⋅cos ⋅t A' ' 2⋅sen ⋅t , para t≥0
v 0= K 1 A' 2⋅cos 0=K 1 A' 2=1
se v 0= A' 2 então K 1=0 e não há transitório
Após o fim do transitório (a exponencial decrescente), o problema restringe-se a
dv
v [ A ' 1⋅cos ⋅t ]
C⋅ p p =
dt
R
R
como v p t= A' 2⋅cos ⋅t A ' ' 2⋅sen ⋅t
então
C⋅⋅[−A ' 2⋅sen ⋅t A' ' 2⋅cos ⋅t ]...
[ A' 2⋅cos⋅t A' ' 2⋅sen ⋅t] [ A' 1⋅cos ⋅t ]
...
=
R
R
agrupando os termos em seno e os termos em cosseno podemos montar duas equações:
para senos: −C⋅⋅A' 2
A' ' 2
=0
R
para cossenos: C⋅⋅A' ' 2
A '2
=30
R
Princípios de Instrumentação Biomédica – COB781
15
3) No circuito abaixo o indutor está descarregado quando a chave S1 abre e a chave S2
fecha. a) Calcule a energia armazenada no indutor no instante t=4s; b) Em t=4s a chave S1
fecha e a S2 abre. Calcule a corrente que passa pelo resistor de 4Ω para t>4. Indique o sentido
correto desta corrente; c) Calcule a energia total dissipada no resistor de 4Ω no intervalo
4t∞ .
a) Transformando o Norton (I=10A e R=2Ω) em Thévenin
di L R
R
⋅i L= ⋅I S
dt L
L
di L 1
1
⋅i L = ⋅10=2,5
dt 4
4
i L 0=0A , i L ∞=10A
−t
i L t =10 – 10⋅e 4 para t>0
−1
i L 4=10 – 10⋅e =6,32 A
1
1
2
2
w L 4= ⋅L⋅i L 4= ⋅8⋅6,32 =159,8 J
2
2
b)
L 8
i L 4=6,32 A e i L ∞=0 e = = =2
R 4
i L t =6,32⋅e
−t −4
2
para t>4
Princípios de Instrumentação Biomédica – COB781
16
c)
∞
w R =∫ R⋅I 2 t dt
0
∞
w R =4⋅∫ 6,322⋅e
−2⋅ t−4
2
∞
⋅dt=4⋅6,322⋅−1⋅e−t −4∣4 =159,8 J
4
4) Para os problemas abaixo, cujas condições iniciais foram calculadas no módulo
anterior calcule tensão e corrente sobre o capacitor ou indutor.
a) Considere I S1 t uma fonte constante e independente e o capacitor descarregado.
−I S1 i R1i C =0 e i R1=I S1−i C
1
−R1⋅i R1 ⋅∫ i C t ⋅dtR1⋅i C =0 – considerando v C 0=0
C
derivando esta equação
di
di
1
R1⋅ C ⋅i C R 1⋅ C =0
dt C
dt
di C
1
⋅i =0
dt C⋅ R1R1 C
−t
i C t =k⋅e C⋅ R R
1
i C 0+ =
1
R1⋅I S1
=k
R1R1
Princípios de Instrumentação Biomédica – COB781
17
−t
R ⋅I
it = 1 S1 ⋅e C⋅ R R para t>0
R 1 R 1
1
1
b) Considere I 1 t uma fonte constante e independente.
i L1 0- =i L1 0+ =
I1
⋅G
G1 G2 2
i L1 ∞=I1
Com o modelo Norton (I1, R1) transformado em um modelo Thévenin o problema
I1⋅R1=L⋅
=
di L1
R1⋅I1
dt
L1
R1
1
− ⋅t
i L1 t =k 1⋅e
k 2 , para t>0.
i L1 ∞=k 2= I1 , i L1 0=k 1k 2=
k 2= I1 , k 1=−
I1
⋅G
G−1G2 2
I1⋅G1
G 1G 2
di t
, para t>0.
v L1 t =L⋅ L1
dt
c) Considere V 1 t uma fonte constante e independente
Princípios de Instrumentação Biomédica – COB781
18
V TH =−
40
20
V , RTH =R N = , I N =−2A
9
9
+
v C1 0 =V TH , v C1 ∞=
V TH
⋅R =3,48V
RTH R2 2
Considerando o equivalente Norton, teremos um circuito formado por C1, R2, RN e IN
em paralelo. Este circuito já foi calculado.
R EQ=
R2⋅RN
R2 R N
I N =C⋅
dvC1 v C1
dt
R EQ
=REQ⋅C 1
1
− ⋅t
v C1 t=k 1⋅e
k 2 , para t>0.
v C1 ∞=k 2=3,48
v C1 0=k 1k 2=−4,44
k 1=−7,92
d) I 1 t é um degrau unitário de corrente.
Princípios de Instrumentação Biomédica – COB781
19
Observe que neste circuito R1 esta em paralelo com L1. Este conjunto está em série
com o paralelo de C2 com R2. Desta forma este circuito é equivalente a dois circuitos paralelo
independentes: a) I1, R1 e L1 ; b) I1, R2 e C2.
−
i L1 t =k 1⋅e
R1
⋅t
L1
−
v C2 t=k 3⋅e
k 2
1
⋅t
R2⋅C 2
k 4
e) I 1 t é um degrau de corrente de 10mA e I 2 t é uma fonte de corrente constante
de 4mA.
Solução: Calculando o equivalente Norton nos terminais do capacitor
R EQ=RTH =12k // 20k16k =9k
i EQ=[10⋅u t – 4]mA
V C1 0– =−
4 mA⋅[20k 12k // 16k]
⋅12k =−16V
20k12k
Princípios de Instrumentação Biomédica – COB781
20
i C 0+ =6mA
16V
=7,77 mA
9k
i C ∞=0
dv C
v
i
C = EQ
dt REQ⋅C C
+
i C t =i C 0 ⋅e
−t
C⋅REQ
⋅u t mA
f) V 1 t é um pulso de tensão de amplitude 10V e largura 0,5s.
v R2=V1 logo i R2=
V1
(a mesma corrente que flui pelo paralelo de C1 com R1)
R2
v C1 =v R1=Vo
Para 0<t<0,5
v C1 0+ =0V , v C1 ∞=−
V1
⋅R
R2 1
=R1⋅C 1
1
− ⋅t
v C1 t=k 1⋅e
k 2
v C1 ∞=k 2=−5
Princípios de Instrumentação Biomédica – COB781
21
v C1 0=k 1k 2=0
k 1=5
Para t>0,5
−
v C1 0,5=5⋅e
1
⋅0,5
0,1
−5≈−4,9V , v C1 ∞=0V
1
− ⋅ t−0,5
v C1 t=k 3⋅e
k 4
k 4 =0
v C1 0,5=k 3 =−4,9
g) V 1 t é um pulso de tensão de amplitude 10V e largura 6⋅R⋅C segundos.
Transformando o Thévenin (V1, R1) em um modelo Norton
dv
v
V1
=C⋅ C1 C1
R1
dt
R1
Para 0t6⋅R1⋅C 1
v C1 0+ =0V , v C1 ∞=V1
=R1⋅C 1
Princípios de Instrumentação Biomédica – COB781
22
1
− ⋅t
v C1 t=k 1⋅e
k 2
1
− ⋅t
v C1 t=−V1⋅e
V1
Para t6⋅R1⋅C 1
v C1 6⋅R1⋅C 1 =−V1⋅e
−
1
⋅6⋅R1⋅C 1
R1⋅C 1
V1≈V1 , v C1 ∞=0V
1
− ⋅ t−6⋅R1⋅C 1
v C1 t=V1⋅e
h) V 1 t é uma fonte constante e independente.
Solução:
i L 0– =
V1
V1
, i L ∞=
, i L 0+ =i L 0-
R1
R1
–
+
v C 0 =V 1 , v C 0 =V 1 , v C ∞=0V
dv C v C
C⋅
=0
dt
R
−t
v C t =6⋅e R⋅C V para t>0.
Princípios de Instrumentação Biomédica – COB781
23