UM PROCESSADOR JAVA VLIW COM BAIXO CONSUMO DE POTÊNCIA PARA
SISTEMAS EMBARCADOS
Antonio C. S. Beck F., Luigi Carro
Instituto de Informática – Universidade Federal do Rio Grande do Sul, Porto Alegre, Brasil
{caco,carro}@inf.ufrgs.br
SUMMARY
This paper presents a low power architecture of a Java processor specific for the embedded system domain. We show that,
thanks to the specific stack architecture and to the use of the VLIW technique, one is able to obtain an aggressive
reduction of power dissipation, with small area overhead. The underlying technique is based on the reuse of memory
access instructions, hence reducing these accesses. The architecture is validated for some complex embedded applications
like IMDCT computation and other synthetic benchmarks. Besides, this processor is compared to other processors with the
same instruction set architecture concerning power, area and performance.
UM PROCESSADOR JAVA VLIW COM BAIXO CONSUMO DE POTÊNCIA PARA
SISTEMAS EMBARCADOS
Antonio C. S. Beck F., Luigi Carro
Instituto de Informática – Universidade Federal do Rio Grande do Sul, Porto Alegre, Brasil
{caco,carro}@inf.ufrgs.br
ABSTRACT
Este artigo apresenta uma arquitetura VLIW de um
processador Java, direcionada para baixo consumo de
potência para ser usada em sistemas embarcados. Nós
mostramos que, graças ao método computacional
particular da arquitetura de pilha e ao uso da técnica
VLIW, uma grande redução de potência pode ser obtida,
com um pequeno incremento de área. Em conjunto com
esta técnica, uma outra é aplicada, baseada na reutilização
de acessos à memória, que traz uma conseqüente
diminuição destes acessos, reduzindo ainda mais o
consumo de energia. As arquiteturas são validadas com
algumas aplicações complexas como IMDCT e outros
benchmarks sintéticos, voltados para o domínio dos
sistemas embarcados. Além do mais, este processador é
comparado com outros processadores da mesma família,
levando em conta desempenho, área e potência.
1. INTRODUÇÃO
Como se pode observar cotidianamente, devido à
evolução tecnológica, usam-se cada vez mais sistemas
computacionais para facilitar nossas tarefas do dia-a-dia.
Estes sistemas são utilizados para diferentes propósitos,
como entretenimento, comunicação, controle de
eletrodomésticos e veículos, entre vários outros. Estes
sistemas são classificados como sistemas computacionais
embarcados. Exemplos práticos de utilização destes
sistemas são fornos de microondas, videogames,
impressoras, mp3 players, câmeras fotográficas digitais,
telefones celulares.
Neste mesmo caminho, enquanto a tecnologia permite
acrescentar mais e mais transistores dentro de um CI
(circuito integrado), pesquisadores direcionam seus
esforços para achar a melhor maneira para a utilização
desta grande capacidade computacional. Conforme o SIA
(Semiconductor Industry Association) Roadmap [1], a
quantidade de transistores que poderão ser integrados em
uma pastilha de silício chegará, em um futuro não muito
distante, a um bilhão.
Em computadores pessoais, por exemplo, a nova
tecnologia é aplicada em várias técnicas para o aumento
de performance, tanto para atender ao usuário comum
com aplicações de escritório e entretenimento, quanto às
grandes companhias, que utilizam este poder
computacional para fazer previsão de tempo, simulações
subatômicas ou de tráfego de veículos.
Todavia, em sistemas embarcados, não é correto
apenas ter o tempo de computação como principal
métrica. Principalmente em sistemas embarcados
portáteis, tem-se que haver uma preocupação equivalente
com o consumo de energia, já que geralmente estes
sistemas são dependentes de uma bateria. Além disto,
aspectos como custo e tempo de produção têm enorme
impacto na eletrônica de consumo.
Para aplicações embarcadas, a tendência é fazer uso da
tecnologia não para alcançar a máxima performance
possível, mas sim, a performance necessária para atender
somente aos requisitos da aplicação, economizando-se em
potência. Somando-se a esse fato, observa-se que os
sistemas embarcados estão agregando cada vez mais
funções, oferecendo ao usuário diversos recursos antes
inexistentes. Por exemplo, telefones celulares de última
geração reúnem funções como acesso a Internet, visor
colorido, reprodução de áudio e vídeo, conexão de dados
via infravermelho, entre outros [2].
Em paralelo a isto, empresas estão cada vez mais
preocupadas em reduzir o tempo do ciclo de projeto de
seus produtos. Em contrapartida, elas precisam melhorar a
qualidade destes: seja agregando novas funções,
melhorando a interface com o usuário, ou ainda
aumentando a vida útil da bateria. Esta meta fica quase
inatingível quando considerada a complexidade de projeto
que atualmente estes sistemas requerem. Devido a isto,
várias metodologias têm sido pesquisadas, como em [3] e
[4], assim como arquiteturas para sistemas embarcados
[5].
Esta crescente complexidade exige que os sistemas
sejam projetados em um alto nível de abstração. Em
algum momento do projeto, esta especificação em alto
nível deverá ser mapeada diretamente para o sistema final,
que é um conjunto de hardware e software. Assim, é
necessária a automatização do projeto, através do uso de
ferramentas EDA (Eletronic Design Automation), para
fazer com que estas descrições em um alto nível sejam
automaticamente transformadas para o hardware real.
Contudo, é necessário tomar decisões, mesmo em um
alto nível de abstração, que terão impacto direto no
desempenho, potência e custo do sistema final.
É em todo este paradigma, da programação em um alto
nível de abstração para reduzir o tempo do ciclo de
projeto, do uso de ferramentas automatizadas, e de
restrições de performance, área e potência, que a
linguagem Java é inserida. A linguagem Java facilita a
modelagem, programação e validação do sistema, já que é
baseada em objetos. Assim, todo sistema pode ser
previamente modelado usando uma linguagem específica,
como a Linguagem Unificada para Modelagem (Unified
Modelling Language ou UML) [6]. Além de tudo, Java
tem a vantagem de ser multiplataforma: o sistema como
um todo pode ser executado e validado previamente em
outra plataforma de desenvolvimento, e depois portado
para a plataforma alvo.
Somando-se a isso, a linguagem possui outras
vantagens para ser aplicada em sistemas embarcados:
facilita e agiliza o desenvolvimento do produto, pois já é
uma linguagem amplamente difundida e utilizada, e além
do mais, oferece segurança e pequeno tamanho ocupado
na memória de instruções, já que Java foi originalmente
desenvolvido para ser transmitido pela Internet e é
baseada em máquinas CISC. São por estas e outras razões
que a linguagem Java está se tornando cada vez mais
popular em ambientes embarcados, que por sua vez, estão
em franca expansão [7]. É estimado que o número de
dispositivos com Java embarcado como telefones
celulares, PDA (Personal Digital Assistent) e pagers irá
crescer de 176 milhões em 2001 para 721 milhões em
2005 [8]. Não obstante, é previsto que no mínimo 80%
dos telefones celulares irão suportar Java em 2006 [9].
Ainda, há previsões da industria que haverá dez vezes
mais desenvolvedores para sistemas embarcados em
relação a desenvolvedores de software de propósito geral
no ano de 2010 [10].
Conclui-se então que é estritamente necessário analisar
cuidadosamente sistemas embarcados baseados em Java.
Contudo, a própria natureza da linguagem Java não é
voltada para performance, e sim para a portabilidade.
Então, otimizações tanto no código quanto na
microarquitetura de processadores Java devem ser feitas
levando em consideração também o quesito potência.
Neste artigo é mostrado um estudo sobre diferentes
arquiteturas capazes de executar bytecodes Java e são
discutidos os requerimentos de área, performance e
principalmente potência, focando sempre em aplicações
para sistemas embarcados. Nós demonstramos que com o
uso da técnica VLIW (Very Long Instruction Word) [23],
pode-se otimizar a execução de instruções e obter uma
drástica redução em potência, em um fator de
aproximadamente 25 vezes, comparando com a nossa
arquitetura Java mais simples.
Além do mais, é demonstrado que o uso da técnica de
VLIW, além do incremento da performance, beneficia-se
de arquiteturas baseadas em pilha e reduz a dissipação de
potência devido à redução de acessos na memória, uma
das maiores causas de consumo de energia em sistemas
embarcados [11,12,13]. Além disso, as técnicas
apresentadas podem ser utilizadas em outras áreas, como
compiladores Java e máquinas virtuais. Nossos
experimentos são validados através de simulações, usando
diferentes versões de nosso processador Java, e
executando diferentes algoritmos usados no domínio dos
sistemas embarcados. A área ocupada pelos processadores
é computada em número de células lógicas de um FPGA,
através da síntese em VHDL destes processadores.
Este artigo é organizado da seguinte maneira: a seção
2 mostra uma breve revisão dos processadores Java e
VLIW existentes. Na seção 3 são discutidas as diferentes
arquiteturas das máquinas Java que serão estudadas, e é
apresentada a vantagem do uso do VLIW em máquinas de
pilha. Seção 4 apresenta o ambiente de simulação: o
simulador de potência e os algoritmos executados nos
processadores. A seção 5 mostra os resultados dos
processadores em termos de potência, área e performance.
Na ultima seção são mostradas as conclusões e
introduzidos trabalhos futuros.
2. REVISÃO BIBLIOGRÁFICA
Um grande número de processadores Java específicos
para o mercado de sistemas embarcados já foi proposto. O
Picojava I, da Sun [14], um processador com quatro
estágios de pipeline, e o Picojava II [15], são
provavelmente os mais estudados. Apesar da
especificação destes processadores permitir um tamanho
variável das memórias cache de instruções e de dados, e a
unidade de ponto flutuante ser opcional, não há nenhum
cuidado especial na microarquitetura para reduzir a área e
consumo de potência do sistema.
O mesmo ocorre com outros processadores Java:
Komodo [16], um microcontrolador Java que tem como
principal finalidade aplicações de tempo real; e Traja [17],
um processador com pipeline que faz reordenação das
instruções para evitar dependência de dados.
No domínio dos processadores VLIW, em [18] e [19]
foram propostos processadores de pilha baseados em
VLIW para um sistema de rede para transmissão
multimídia em tempo real e processamento de dados.
Além disso, a Sun propôs a arquitetura MAJC [20], que
explora o paralelismo em vários níveis: instrução, dados,
threads e processos, através de multithreading
especulativa e vertical, multiprocessadores em um chip e
VLIW.
Dentre todos os processadores citados anteriormente,
em nenhum, quando da construção da microarquitetura, se
teve a preocupação de se aplicar técnicas para a redução
de potência, assim como otimizações nos bytecodes Java
com o mesmo propósito. Além do mais, suas
microarquiteturas não são totalmente parametrizáveis,
mostrando uma preocupação secundária com a área do
sistema, tendo em vista somente a performance como
preocupação principal.
Neste caminho, a pesquisa de processadores Java com
baixo consumo de potência, capazes de manter a
performance suficiente para executar a aplicação alvo com
o mínimo de dissipação de energia, é o objetivo deste
trabalho.
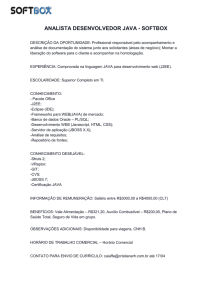
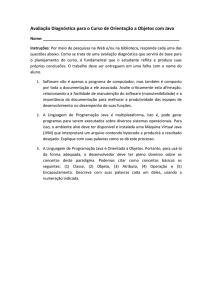
3.2. Femtojava Low-Power
A versão Femtojava Low-Power [22] possui um pipeline
de cinco estágios: busca de instruções, decodificação,
busca de operandos, execução e escrita de resultados,
como pode ser observado na figura 2. Uma das principais
características deste processador é a implementação da
pilha de operandos (operand stack) e do depósito de
variáveis locais do método em um banco de registradores,
ao invés de usar a memória principal para estes
propósitos, como é feito no Femtojava multiciclo.
+
0
MUX
1
MAR
Output
Ports
IMM
MUX
Data Bus
Intruction Bus
Prg Mem Address Bus
Input
Ports
Data Mem Address Bus
A
ROM
Const
+/SP
FRM
MUX
3. ARQUITETURAS DOS PROCESSADORES JAVA
VAR
Timer
A
ALU
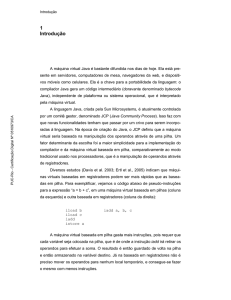
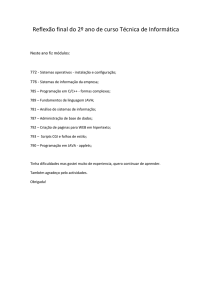
3.1. Femtojava Multiciclo
O processador FemtoJava [21] é um microcontrolador
baseado em operações de pilha e que executa bytecodes
Java. Características do Femtojava são o conjunto
reduzido de instruções, arquitetura Harvard, pequeno
tamanho e facilidade de inserção e remoção de instruções.
Este processador foi projetado especificamente para a
utilização em sistemas embarcados. Possui algumas
características interessantes, como o tamanho da parte de
controle ser diretamente proporcional ao número de
instruções utilizadas. Isto é, a partir de uma ferramenta
disponível chamada Sashimi [21], o bytecode Java gerado
é analisado e a parte de controle irá suportar apenas
aquelas instruções que são utilizadas pela aplicação.
A primeira arquitetura estudada foi o Femtojava
Multiciclo [21], que leva de 3 a 14 ciclos para executar
uma instrução, dependendo de sua complexidade.
Instruções aritméticas levam 4 ciclos, já chamadas e
retornos de métodos, 14 ciclos. Sua microarquitetura pode
ser observada na figura 1.
MUX
PC
RAM
B
Interrupt
Handler
IR
Control
Figura 1 – Femtojava Multiciclo [21]
BI
D
BO
EX
ER
Figura 2 – Femtojava Low-Power [22]
O primeiro estágio, de busca de instruções, é composto
por uma fila de instruções com nove registradores de 1
byte cada. A primeira instrução da fila é mandada para o
estágio de decodificação. Este estágio tem três funções:
geração da palavra de controle para a instrução,
verificação de dependência de dados e informar ao
controlador da fila de instruções o tamanho da instrução
corrente, com o objetivo de colocar a próxima instrução
do fluxo no primeiro lugar da fila. Isto é necessário
porque as instruções têm comprimento variável: podem
ter nenhum, um ou dois operandos imediatos. Quando no
mínimo 4 registradores da fila de instrução estão vazios,
uma palavra de 32 bits é buscada da memória de
instruções, tomando como base o valor do registrador PC
(program counter).
A busca de operandos (terceiro estágio) é feita em um
banco de registradores de tamanho variável, definido a
priori em estágios anteriores do ciclo de projeto, através
de simulação. Como já citado anteriormente, a pilha e o
depósito das variáveis locais do método estão disponíveis
no banco de registradores. A pilha e o depósito de
variáveis locais são encontrados no mesmo banco de
registradores para facilitar a chamada e retorno de
métodos, tirando vantagem da especificação da JVM
(Java Virtual Machine), onde cada método é localizado
por um apontador de quadro (frame) na pilha.
Há dois registradores usados neste estágio: SP e
VARS. Eles apontam para o topo da pilha e para o início
do depósito de variáveis, respectivamente. Dependendo da
instrução, um deles é usado como base para a busca de
operandos. Depois desta busca, os operandos são
mandados para o quarto estágio, onde eles serão
executados. Não há predição de desvio, com o objetivo de
economizar em área. Todos os desvios são considerados
previamente como não verdadeiros. Caso o desvio seja
verdadeiro, uma penalidade de três ciclos é paga.
O quinto estágio é responsável por salvar, se
necessário, o resultado do estágio de execução no banco
de registradores, usando o SP ou o VARS como base.
Como o banco de registradores não pode ser lido e escrito
simultaneamente, quando uma instrução no quinto estágio
grava o seu resultado e uma outra instrução no terceiro
estágio precisa buscar algum operando, uma bolha é
inserida no pipeline.
O processador Femtojava Low-Power faz uso da
técnica de forwarding [23]: Se há uma instrução no
estágio de execução que irá escrever o seu resultado no
banco de registradores (pilha ou variável local) no
próximo ciclo, e a próxima instrução do fluxo precisa
acessar o banco de registradores para buscar algum
operando que faça parte do resultado da instrução
anterior, uma dependência verdadeira (RAW – Read After
Write, ou leitura depois de uma escrita) é caracterizada.
Uma das soluções é parar o pipeline, inserindo bolhas, até
a primeira instrução passar pelo estágio de escrita dos
resultados. Outra solução é fazer uso da técnica de
forwarding, passando diretamente o resultado do estágio
de execução para o estágio de busca de operandos.
Dois tipos de forwarding podem ocorrer: quando uma
instrução no estágio de execução consome um operando
do topo da pilha (como a instrução istore, que grava o
topo da pilha em algum lugar do depósito de variáveis
locais); ou quando alguma instrução consome dois
operandos da pilha (como em operações aritméticas: iadd,
isub, ior). No primeiro caso, o operando repassado vai do
estágio de execução (quarto estágio) para o estágio de
busca de operandos. No segundo caso, o segundo
operando necessário vem do ultimo estágio, de escrita dos
resultados.
Especificamente em processadores de pilha, o uso
desta técnica traz uma vantagem quando comparada com
processadores RISC: ao contrário destes, em instruções
que manipulam a pilha, os operandos repassados através
de forwarding para estágios anteriores do pipeline não são
usados mais no futuro. Como conseqüência, não há
necessidade de gravar o resultado destas instruções no
banco de registradores. Isto resulta em uma grande
redução no consumo de potência, porque o número de
escritas na pilha é reduzido. Em [24] mostramos um
ganho de 8 vezes comparando a arquitetura sem e com
forwarding com um incremento mínimo de área.
3.3. Femtojava VLIW
O processador Femtojava VLIW é basicamente uma
extensão do Femtojava Low-Power, com suas unidades
funcionais e decodificadores de instrução replicados. Os
decodificadores adicionais não suportam as instruções de
chamada e retorno de métodos, já que as instruções
responsáveis por isso estão sempre no fluxo principal. O
depósito de variáveis locais encontra-se apenas no
primeiro banco de registradores. Quando instruções de
outros fluxos precisam ler ou escrever algum valor de uma
variável local do método, elas precisam buscar de lá. Cada
fluxo de instrução tem seu próprio banco de registradores
para a pilha de operandos, que por sua vez possuem
menos registradores que o banco principal, já que a pilha
de operandos destes fluxos secundários não crescem tanto
quanto a principal.
A palavra VLIW tem um tamanho variável, evitando
acessos desnecessários à memória. Um cabeçalho na
primeira instrução da palavra informa para o controlador
de busca de instruções quantas instruções a palavra
corrente possui.
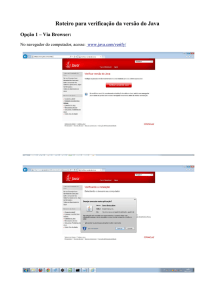
A busca por paralelismo em um programa Java é feito
diretamente nos bytecodes. O algoritmo funciona da
seguinte maneira: todas as instruções que dependem do
resultado da anterior são agrupadas em um bloco de
operações. Todo o programa Java é dividido em grupos
como este. Estes grupos podem ser paralelizados
respeitando o número de unidades funcionais existentes.
Por exemplo, se há apenas um multiplicador, duas
instruções que usam esta unidade funcional não podem
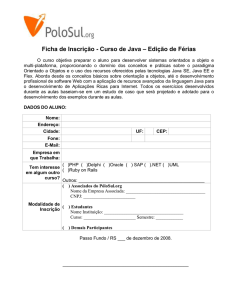
ficar em paralelo. Um exemplo deste procedimento é
apresentado na figura 3.
(a)
(b)
Figura 3 – Processo de formação da palavra
VLIW
No exemplo, na figura 3b, a primeira instrução imul
(multiplicação) irá consumir os operandos empilhados
previamente pelos dois bipush (bipush 10 e bipush 5).
Depois disso, a instrução ishl (deslocamento para
esquerda) irá consumir outros dois operandos empilhados
pelos próximos bipush (bipush 3 e bipush 4). Depois, a
instrução iadd (soma) irá consumir os resultados de imul e
ishl. Finalmente, a instrução istore irá salvar o resultado
da instrução iadd no depósito de variáveis locais. Como
há uma relação entre todas estas instruções, isto é, umas
usam os resultados das operações das outras, elas formam
um bloco de operação. Outro bloco de operação é
formado pelas duas ultimas instruções bipush (bipush 7 e
bipush 8) e imul, já que estas instruções dependem entre si
e não utilizam nenhum resultado das instruções do bloco
anterior. Em outras palavras, a pilha de operandos destes
dois blocos são independentes. Conseqüentemente, eles
podem ser paralalelizados, como pode ser observado na
figura 5b. É importante perceber que as duas instruções
imul não podem ficar na mesma palavra, já que estamos
considerando que nosso processador VLIW possui apenas
um multiplicador.
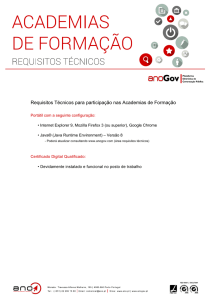
Como mencionado anteriormente, uma das maiores
causas de consumo de energia são os acessos à memória.
Assim, outra otimização nos bytecodes Java foi feita
preocupando-se com este problema. Depois da busca por
paralelismo, outra busca é feita: instruções que lêem a
memória principal (getstatic) são alinhadas na mesma
palavra VLIW. Isto só ocorre se elas buscam o valor no
mesmo endereço e entre estas duas instruções de busca na
memória este valor não muda, isto é, não há escrita neste
endereço de memória. Conseqüentemente, com as
instruções alinhadas, apenas um getstatic é executado,
passando diretamente o seu resultado para os outros que
estão na mesma palavra, economizando assim potência
decorrente dos outros getstatics que não precisaram ser
executados. A figura 6 ilustra o procedimento.
Figura 4 – Processo de alinhamento dos acessos
à memória
4. AMBIENTE DE SIMULAÇÃO
4.1 CACO-PS
CACO-PS [22] é um simulador de potência configurável,
de código compilado e ciclo-a-ciclo, que foi utilizado para
prover dados sobre o consumo de energia, utilização de
memória e performance dos processadores.
A dissipação de potência é baseada na atividade de
chaveamento. Como os processadores têm memórias
separadas para instruções e dados, também foi incluso um
módulo para medir as memórias RAM e ROM. Assim,
pode-se verificar a potência relativa consumida pela CPU,
memória de instruções e memória de dados. É importante
medir o impacto de cada um destes blocos, para melhor
explorar o espaço de projeto.
A descrição de uma arquitetura no simulador é baseada
na técnica de componentes, onde um componente pode ter
qualquer nível de abstração. Todos os processadores
foram descritos na sintaxe do simulador usando
componentes nos mais diversos níveis de abstração. Para
fazer a estimativa de potência, a taxa de chaveamento de
cada componente é coletada. Conseqüentemente, pode-se
estimar a potência dinâmica de cada componente, com
dados relativos em número de capacitância de gates
chaveadas por componente. Esta técnica é comparável
com técnicas baseadas em componente como em [25,26].
4.2. Algoritmos Utilizados
Cinco diferentes tipos de algoritmos foram implementados
e simulados nas arquiteturas descritas na seção 3. Cálculo
do seno, bastante utilizado em bibliotecas aritméticas;
ordenação e busca, usados em agendas; IMDCT (Inverse
Modified Discrete Cosine Transformation), uma
importante parte do algoritmo de descompressão de MP3;
e uma biblioteca que emula somas de ponto flutuante, já
que o processador Femtojava não possui uma unidade de
ponto flutuante para economizar em área.
Dois diferentes algoritmos de busca são utilizados. O
primeiro faz uma pesquisa seqüencial em um vetor
ordenado. O segundo faz uma pesquisa binária neste
mesmo vetor. Os algoritmos de ordenação arranjam um
conjunto de 10 números os colocando em ordem
crescente. Três diferentes tipos de ordenação são feitos:
usando bubblesort, selectsort e insertsort. Já a emulação
de soma de pontos flutuantes faz 20 somas de dois
números em ponto flutuante e coloca os resultados em um
vetor na memória. Finalmente, o algoritmo de cálculo de
seno utiliza o método cordic para calcular o resultado.
Três diferentes versões de laços desenrolados (loop
unrolled) também foram feitas para a versão IMDCT.
5. RESULTADOS
A tabela 1 mostra a área ocupada pelas três diferentes
versões do processador Femtojava. É importante ressaltar
que o banco de registradores, utilizado como pilha de
operandos e depósito de variáveis locais do método, tem
32 registradores, que é o máximo requerido entre todas as
aplicações (note que eles estão sendo contados na tabela,
apesar de que a memória do FPGA poderia ter sido usada
para este propósito). A área computada também inclui a
unidade de controle que suporta todas as instruções do
conjunto do Femtojava. Os dados de área foram tirados
através do VHDL de cada versão usando o programa
Leonardo Spectrum [17], e são apresentados em números
de células lógicas.
Tabela 1 – Área ocupada pelas versões em VHDL
dos processadores, em células lógicas
PROCESSADOR
MULTICICLO
PIPELINE
Area (LCs)
1365
3220
VLIW
(n° de instruções por palavra)
2
4077
4
5347
8
7887
A tabela 2 mostra a performance de cada algoritmo em
cada arquitetura, em número de ciclos. Em alguns
algoritmos sendo executados na versão VLIW, o resultado
em número de ciclos é o mesmo. Isto acontece porque
mesmo tendo mais instruções por palavra disponível para
a paralalelização, o limite já foi alcançado mesmo com
menos instruções.
Tabela 2 – Performance das
arquiteturas, em número de ciclos
Algoritmo
Multiciclo
Seno
Ord./Bubble
Ord./Select
Ord./Insert
Busca Binária
Busca
Sequencial
IMDCT
IMDCT u1
IMDCT u2
IMDCT u3
Soma ponto
flutuante
2447
6950
5335
5111
1162
diferentes
Número de Ciclos
VLIW
Pipeline
2
4
755
599
592
2424
2104
1967
1930
1707
1670
1934
1601
1331
403
368
365
Figura 5 – Potência consumida por ciclo no
núcleo
8
583
1967
1670
1331
365
7586
140300
97354
92882
51345
1997
40306
31500
30369
18858
1775
33050
19325
18689
12789
1775
32994
12313
11737
8929
1775
32994
9944
9432
7741
30747
14531
12474
12313
12313
Como podem ser observados na tabela 2, melhores
resultados são alcançados quando usadas versões com
laços desenrolados (IMDCT u1, IMDCT u2 e IMDCT
u3). A razão é a diminuição de desvios condicionais, que
é uma das maiores vantagens das versões desenroladas,
que tem como principal desvantagem o aumento no
tamanho do programa, e conseqüentemente, da memória
de instruções. Reduzindo o número de desvios
condicionais, reduz-se o número de ciclos pagos por laços
que são verdadeiros (3 ciclos no caso do Femtojava, que
sempre considera que a condição de um laço não é
verdadeira). Para a versão VLIW, a grande vantagem do
uso da versão desenrolada é que ela expõe mais o
paralelismo no nível dos bytecodes para o analisador, já
que o tamanho dos blocos básicos aumenta
significativamente.
Operando na mesma freqüência, as arquiteturas VLIW
são as que possuem um maior consumo de energia por
ciclo no núcleo, já que ela são as mais complexas, com
mais unidades funcionais e registradores. Este
comportamento pode ser observado na figura 5 (onde
VLIW 2 significa 2 instruções por palavra e assim por
diante).
Apesar da potência consumida por ciclo nas
arquiteturas VLIW serem maiores que nas arquiteturas
Multiciclo e Low-Power, a energia total consumida pelo
sistema é menor, por causa do aumento da média de IPC
(Instruction per Cycle, ou instruções por ciclo) executadas
e também pelo decremento no número de acessos à
memória.
Figura 6 – Total de energia gasta no núcleo
A versão Multiciclo usa a memória principal como
pilha de operandos e depósito de variáveis locais do
método. Há uma grande diferença em termos de consumo
de energia entre esta arquitetura e a Low-Power, com
pipeline. Esta, por sua vez, somente acessa a memória em
chamadas e retorno de métodos ou em instruções
específicas, como getstatic e putstatic. A figura 6 mostra a
vantagem de implementar a pilha de operandos e o
depósito de variáveis em um banco de registrador no
núcleo ao invés de usar a memória principal.
Figura 8 – Economia de memória em VLIW
quando utilizado o alinhamento de getstatic
Figura 7 – Total de energia gasta com acessos
à memória
Agora, na figura 8, mostra-se a vantagem quando
usando a técnica VLIW com e sem alinhamento de
getstatic, como já foi explicado na seção 3. Nota-se uma
expressiva redução em alguns algoritmos, principalmente
no filtro IMDCT. É importante notar que há uma pequena
perda de paralelismo quando utilizada esta técnica já que
algumas instruções são deslocadas para os gestatic
ficarem alinhados na mesma palavra. Esta perda fica em
média, entre os algoritmos analisados, de 1,5%
Como já foi demonstrado, passando da arquitetura
Multiciclo para a Low-Power, e da Low-Power para
VLIW, vantagens tanto de economia de potência no
núcleo quanto aos acessos à memória RAM são obtidas.
Mostra-se na figura 9 o consumo total de energia
(considerando núcleo, RAM e ROM) entre todas as
arquiteturas utilizadas.
A diferença de consumo entre a versão Multiciclo e
Low-Power tem duas razões principais: o uso do banco de
registradores no núcleo e a diminuição de escritas na pilha
devido ao uso da técnica de forwarding. Já a melhora
apresentada pelo VLIW se resume basicamente a
utilização de bancos de registradores menores da pilha de
operandos usados pelos fluxos secundários, ao invés de
usar sempre o banco principal, de maior tamanho.
Figura 9 – Energia total consumida pelos
algoritmos nas diferentes versões
Em aplicações embarcadas, muitas delas com
requerimentos de tempo real, um desempenho específico
precisa ser garantido para determinada aplicação.
Assumindo que este desempenho já é alcançado pela
versão Multiciclo, então a freqüência de operação pode
ser reduzida nas versões Low-Power e VLIW com o
objetivo de economizar ainda mais potência, já que estas
arquiteturas podem alcançar uma média maior de
instruções por ciclo, como já mostrado na tabela 1.
Assim, assumindo que a potência dinâmica é a
dominante dentro da potência total consumida pelo
sistema, e que todos os gates do processador foram uma
capacitância de chaveamento coletiva, com uma taxa de
chaveamento em comum chamada de f, então:
(1)
Como pode ser observado em [27], a tensão de
funcionamento do processador Transmeta TM5400
(conhecido como Crusoe) [28], desenvolvido para
sistemas embarcados, pode diminuir em um fator de 4,6%
a cada 10% de redução da freqüência de operação.
As figuras 10 e 11 mostram a redução relativa em
consumo de energia quando a freqüência das versões
Low-Power e VLIW são reduzidas para alcançar
exatamente a mesma performance da versão Multiciclo.
Conseqüentemente, também há uma redução de voltagem,
tomando como base a equação em (1).
Finalmente, nós mostramos a vantagem de aumentar a
área do processador para suportar o pipeline, banco de
registradores interno e VLIW, trocando área por uma
enorme economia em termos de potência. A figura 12
mostra a comparação relativa entre o aumento de área e a
média de potência consumida por todas as aplicações.
Figura 12 – Analisando área e potência entre o
Multiciclo e a versão Low-Power
Figura 10 – Energia total consumida pelo
Multiciclo e Low-Power considerando que
possuem o mesmo desempenho
Como pode ser observado, com um pouco menos de 3
vezes de incremento de área, em média um fator de 25
vezes é obtido em termos de redução de energia.
7. CONCLUSÕES E TRABALHOS FUTUROS
Figura 11 – Energia total consumida pela LowPower e versões VLIW considerando que todas
possuem o mesmo desempenho
É importante ressaltar que as versões IMDCT com
loop unrolled são as mais beneficiadas, já que devido ao
uso desta técnica um alto grau de paralelismo é alcançado,
trazendo uma alta taxa de instruções executadas por ciclo.
Sendo assim, a freqüência e a tensão podem ser
diminuídas ainda mais quando comparados com outros
algoritmos.
Nós demonstramos que para aplicações embarcados, é
possível obter uma grande redução no consumo de
potência com proporcionalmente um pequeno incremento
na área total. Particularmente para máquinas de pilha, o
uso de pipeline, da pilha sendo implementada em um
banco de registradores e da técnica VLIW, trazem uma
grande redução em termos de consumo de potência.
Para versões com laços desenrolados, o VLIW traz
resultados promissores, pois há uma maior exposição do
paralelismo. Assim, para trabalhos futuros, nós
pretendemos estudar outras alternativas para aumentar a
performance do VLIW, como o uso da técnica de software
pipelining para expor ainda mais o paralelismo entre os
bytecodes. Além disso, outros algoritmos bastante usados
em sistemas embarcados estão sendo construídos e serão
estudados.
7. REFERÊNCIAS BIBLIOGRÁFICAS
[1] Semiconductor Industry Association Home Page. Disponível
em: http://public.itrs.net/files/1999_SIA_Roadmap/Home.htm.
[2] Nokia Home Page. Disponível em: http://www.nokia.com.
[3] S. Edwards, L. Lavagno, E. A. Lee, A. SangiovanniVincentelli, “Design of Embedded Systems: Formal Models,
Validation, and Synthesis”. Proceedings of the IEEE, NewYork,
v.85, n.3, Mar. 1997, p.366-390
[4] A. Sangiovanni-Vincentelli, G. Martin, “Plataform-Based
Design and Software Design Metodology for Embedded
Systems”. IEEE Design & Test, vol. 18, no. 6, pp. 23-33, NovDec. 2001.
[5] M. Jacome, G. Veciana, “Design Challenges for New
Application-Specific Processors”. IEEE Design & Test, vol. 17,
no. 2, Apr-June. 2000, pp. 40-50
[6] Rational Software Corporation. Unified Modeling Language.
Notation Guide. Version 1.0, Santa Clara, 1997. Disponível em:
<http://www.rational.com>.
[7] M. Schlett, “Trends in Embedded-Microprocessor Design”.
Computer, vol. 31, no. 8, 1998, pp. 44–49
[8] D. Takahashi, Java Chips Make a Comeback, Red Herring,
2001
[9] G. Lawton, “Moving Java into Mobile Phones”, Computer,
vol. 35, n. 6, 2002, pp. 17-20
[18] K. Nakamura, K. Sakai, T. Ae, “Real-Time Multimedia
Data Processing using VLIW Hardware Stack Processor”,
Proceedings IEEE Workshop on Parallel and Distributed RealTime Systems, 1995, pp. 84-89
[19] T. Ae, K. Nishimura, R. Aibara, K. Sakai, K. Nakamura,
“Real-Time Multimedia Network System Using VLIW
Hardware Stack Processor”, Proceedings IEEE Workshop on
Parallel and Distributed Real-Time Systems, 1995, pp. 84-89
[20] M. Tremblay, J. Chan, S. Chaudhry, A. Conigliaro, S. Tse,
“The MAJC Architecture: A Synthesis of Parallelism and
Scalability”. IEEE Micro, vol. 20, n. 6, 2000, pp. 12-25
[21] S.A. Ito, L. Carro, R.P. Jacobi, “Making Java Work for
Microcontroller Applications”, IEEE Design & Test of
Computers, vol. 18, n. 5, 2001, pp. 100-110
[22] A.C.S. Beck F., J.C.B. Mattos, F.R. Wagner, L. Carro,
“CACO-PS: A General Purpose Cycle-Accurate Configurable
Power-Simulator”, 16th Brazilian Symp. Integrated Circuit
Design (SBCCI 2003), Sep. 2003
[10] R.W. Atherton, “Moving Java to the Factory”. IEEE
Spectrum, 1998, pp. 18-23,
[23] J. L. Hennessy, D. A. Patterson, Computer Architecture: A
Quantitative Approach, Morgan Kaufmann Publishers, 3th
edition, 2003
[11] V. Tiwari, S. Malik, A. Wolfe, “Power Analysis of
Embedded Software: A First Step Towards Software Power
Minimization”, IEEE Transactions on VLSI Systems, vol. 2, n. 4,
Dec. 1994, pp. 437–445
[24] A. C. Beck F., L. Carro, "Low Power Java Processor for
Embedded Applications". VLSI-SOC 2003 - IFIP 12th
International Conference on Very Large Scale Integration,
Germany, December, 2003
[12] T. Simunic, G. Micheli, L. Benini, “Energy-Efficient
Design of Battery-Powered Embedded Systems”, Proceedings of
the International Symposium on Low Power Electronics and
Design (ISLPED99), Aug. 1999
[25] V. Dalal, C. P. Ravikumar, "Software Power Optimizations
in an Embedded System". VLSI Design Conference, IEEE
Computer Science Press, Jan. 2001, pp. 254-259
[13] G. Chen, R. Shetty, M. Kandemir, N. Vijaykrishnan, M.
Irwin, “Tuning garbage collection for reducing memory system
energy in an embedded java environment”, ACM Transactions
on Embedded Computing Systems, vol. 1, n. 1, Nov. 2002, pp.
27-55
[14] J. M. O’Connor, M. Tremblat, “Picojava-I: the Java Virtual
Machine in Hardware”, IEEE Micro, vol. 17, n. 2, Mar-Apr.
1997, pp. 45-53
[15] Sun Microsystems. PicoJava-II Microarchitecture Guide.
Mar. 1999
[16] J. Kreuzinger, R. Marston, Th. Ungerer, U. Brinkschulte, C.
Krakowski, “The Komodo Project: Thread-based Event
Handling Supported by a Multithreaded Java Microcontroller”,
25th Euromicro Conference (EUROMICRO), Sep. 1999, pp.
2122-2128
[17] N. Shimizu, M. Naito, “A Dual Issue Queued Pipelined
Java Processor TRAJA-Toward an Open Source Processor
Project”. Proceedings of Asia Pacific Conference on ASIC (APASIC), 1999, pp. 213-216
[26] R. Chen, M. J. Irwin, R. Bajwa, “Architecture-Level Power
Estimation and Design Experiments”. ACM Transactions on
Design Automation of Electronic Systems, vol. 6, n. 1, Jan. 2001,
pp 50-66
[27] J. Pouwelse, K. Langendown, H. Sips, “Dynamic Voltage
Scaling on a Low-Power Microprocessor”, The Seventh Annual
International Conference on Mobile Computing and Networking,
2001, pp. 251-259
[28] Transmeta Corporation, Tm5400 processor specifications,
http://www.transmeta.com
[29]
Leonardo
Spectrum,
http://www.mentor.com/synthesis
Disponível
em: