Anais do XIX Congresso Brasileiro de Automática, CBA 2012.
REGULADOR QUADRÁTICO ÓTIMO APLICADO EM CONTROLE DE TENSÃO E CORRENTE DE
SAÍDA DE INVERSOR NPC 3 NÍVEIS MONOFÁSICO UTILIZANDO ESTIMAÇÃO DE CORRENTE
MARCELO D. PEDROSO1, FRANCISCO J. VIGLUS1, CLAUDINOR B. NASCIMENTO1,MAURÍCIO S. KASTER1,
ANGELO M. TUSSET1
1
Universidade Tecnológica Federal do Paraná
Av. Monteiro Lobato, S/N, km 04, CEP:84016-210, Ponta Grossa, PR, Brasil
E-mails: [email protected],[email protected],[email protected],
[email protected], [email protected]
Abstract –This paper proposes a comparative study between an optimal quadratic regulator (LQR) and a ProportionalIntegral controller (PI), to control the output voltage and current of a single-phase 3-level NPC inverter. To reduce costs
related to the design and take advantage of the simplicity of measurement, current measurements was chosen not to be
carried out. However, to feedback the control loops, estimation techniques have been developed for the load current. Two
different techniques are presented in order to estimate the load current, the former being parametric, obtained from the
mathematical model of the converter, and the other based on the oscillation of the voltage present in the DC bus capacitors. The voltages on the DC bus capacitors are measured to ensure a balance between their mean values. To realize this,
a vertical offset in the reference signal of the control loop is done, affecting directly the switching. Simulation results are
shown to demonstrate the efficiency of the estimated current technique and the performance of the controllers used.
Keywords –LQR, Linear Control, NPC Inverter, Unbalanced DC bus, Current estimation.
Resumo - O presente trabalho propõe um estudo comparativo entre um regulador quadrático ótimo (LQR) e um controlador Proporcional-Integral (PI), para o controle da tensão e corrente de saída de um inversor NPC 3 níveis monofásico.
Visando reduzir os custos relacionados ao projeto e devido à simplicidade de medição, optou-se por não serem realizadas
medições de corrente. No entanto, para suprir a malha de controle, foram desenvolvidas técnicas de estimação para a
corrente da carga. São apresentadas duas técnicas para obter a corrente estimada da carga, sendo uma paramétrica, obtida a partir do modelo matemático do conversor, e outra baseada na oscilação de tensão presente nos capacitores do barramento CC. As tensões sobre os capacitores do barramento são medidas para garantir o equilíbrio entre seus valores
médios. Para isso é efetuado um deslocamento vertical no sinal de referência da malha de controle, afetando diretamente
a comutação dos semicondutores controlados. Resultados de simulações são apresentados para comprovar a eficiência da
estimação de corrente e desempenho dos controladores utilizados.
Palavras-chave - LQR, Controle Linear, Inversor NPC, Desequilíbrio do barramento CC, Estimação de corrente.
1 Introdução
O crescimento econômico global tem propiciado a muitos países, sejam eles desenvolvidos ou não,
a possibilidade de investimentos em tecnologias que
consomem energia elétrica em níveis de potência
cada vez mais elevados, podendo alcançar a ordem
de centenas de Mega Watts. É evidente que na medida em que se elevam os níveis de potência, para se
reduzir as perdas durante o processo de transmissão,
distribuição e consumo, é necessário trabalhar com
tensões mais elevadas. Quando se trata de processamento eletrônico de energia, que normalmente é
realizado por um conversor estático, em aplicações
com níveis de tensões ou correntes mais elevados, é
necessário realizar uma associação em série ou paralela dos dispositivos semicondutores. Nestas associações, devido às diferenças físicas dos semicondutores, nem sempre a tensão ou corrente suportada por
eles ficam igualmente distribuídas, acarretando em
severos problemas de funcionamento para os conversores.
No entanto, com o surgimento dos conversores
multiníveis, que naturalmente são constituídos por
uma combinação dos semicondutores conectados em
série ou paralelo, os problemas relacionados, principalmente aos esforços de tensão, foram minimizados.
ISBN: 978-85-8001-069-5
Porém, por possuírem características próprias de
funcionamento, novas estratégias de modulação e
controle foram e vem sendo desenvolvidas (Lei,
2005).
Entre as vantagens em relação aos conversores
convencionais, os conversores multiníveis apresentam redução da tensão sobre os semicondutores,
menor distorção harmônica das tensões de saída e,
consequentemente, filtro de saída reduzido (Rodriguez, 2002). As topologias de conversores multiníveis podem ser dividas em três categorias (Lai,
1996), ou seja, as com diodos de grampeamento
(Nabae, 1981), as com capacitores flutuantes (Zhang,
2002) e, por fim, aquelas com células conectadas em
série (Fujii, 2005).
Os inversores de tensão multiníveis com diodos
de grampeamento (Diode Clamped Converter) também são conhecidos como inversores com ponto de
neutro grampeado, ou NPC – “Neutral Point Campled”. O uso desta topologia é justificado principalmente pela possibilidade de elevados níveis de potência na saída do inversor, frequência de comutação
superior aos inversores convencionais e menores
taxas de distorções harmônicas na tensão de saída
(Braga, 2002). Por outro lado, devido ao ponto de
neutro, para a grande maioria das cargas utilizadas,
ocorre o desbalanço das tensões dos capacitores do
3657
Anais do XIX Congresso Brasileiro de Automática, CBA 2012.
+
S1
C1
_
Ro
Dg1
S2
Co
Vcc
_
ISBN: 978-85-8001-069-5
vc1
Dg2
vc2
+
_
Lo
+
barramento CC, prejudicando a simetria da tensão de
saída do inversor (Pinheiro, 2004).
Normalmente, para manter o equilíbrio dos níveis de tensão sobre os capacitores, é necessário
realizar um controle em malha fechada, que deve
atuar diretamente na comutação dos semicondutores
controlados (Oliveira, 2005;Pinheiro, 2009). Estudos
recentes mostram que é possível manter as tensões
dos capacitores equilibradas através da modificação
da modulação convencional normalmente utilizada
(Yoon-Hyuk, 2011;Xinchun, 2011).
Em meio a esse contexto, o presente trabalho
propõe a utilização de um regulador quadrático ótimo
(LQR) comparado ao controlador ProporcionalIntegral (PI) com objetivo principal de controlar a
tensão e a corrente de saída de um inversor NPC 3níveis monofásico com diodos de grampeamento e
manter o equilíbrio das tensões médias dos capacitores do barramento CC. A estratégia adotada para
manter o valor médio dos capacitores é baseada na
média da diferença das suas respectivas tensões instantâneas. A soma deste valor com o sinal de erro,
obtido pela subtração do sinal de referência pela
tensão medida, gera um deslocamento vertical no
sinal da ação de controle.
Como a ação do controle melhora o desempenho
do inversor em relação à sua tensão de saída, o tempo
para equilibrar as tensões dos capacitores conectados
ao ponto NPC é reduzido. Ao melhorar o desempenho do controlador em relação à sua saída, consequentemente melhora-se o tempo de resposta do
balanço dos capacitores quando o sistema sofre perturbações na entrada ou na saída.
Visando menor complexidade em medições do
circuito, foi determinada a eliminação dos sensores
de correntes, monitorando apenas as tensões sobre os
capacitores presentes. São apresentadas duas possíveis técnicas de estimação de correntes da saída do
inversor. As técnicas propostas se diferem principalmente pelo fator carga, onde a primeira estimação é
baseada no modelo matemático do inversor. Esta
técnica limita-se a situações onde a carga é fixa, visto
que o valor da carga compõe as equações do modelo.
A segunda técnica proposta é baseada no comportamento elétrico dos componentes do inversor, onde a
oscilação de tensão sobre os capacitores presentes
nesta topologia é relacionada diretamente com a
corrente na saída do inversor. Esta estratégia não se
limita à variação de carga, o que a torna mais interessante nas aplicações onde a carga pode ser alterada.
Para verificar o melhor desempenho dos controladores são realizadas simulações de um inversor
NPC 3 níveis com malha de tensão e corrente, esta
utilizando a corrente estimada. O controle LQR e o
controle PI são apresentados e os resultados destes
são comparados em desempenho e em tempo de
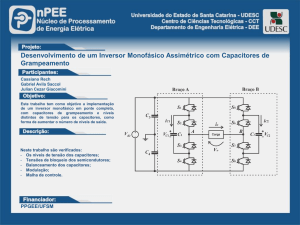
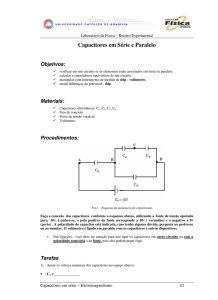
resposta a distúrbios. A figura 1 apresenta o inversor
NPC 3-níveis com diodos de grampeamento e as
respectivas malhas de controle com controladores
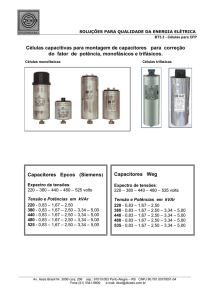
PI’s. A figura 2 apresenta o diagrama de controle
utilizando o controle LQR.
S3
vc0
C2
S4
ΔVC1C2
_
+ +
+
vref
d(s)
ilref
d'
+
PWM
PI
PI
_
Vcc
e(s)
ilest
2Rest
Estimador
de
vc0
Corrente
vc1
vc2
Figura 1- Inversor NPC 3 Níveis Monofásico utilizando controlador PI com estimação de corrente.
vc1 vc2
vc0
ΔVC1C2
+ +
+
+
Rest
vc0
+
Kv
+
vref
dref
_
_
Estimador
de
Corrente
+
+
PWM
Ki
ilest
vc1
vc2
Figura 2 - Controlador LQR com estimação de corrente.
2 - Inversor NPC 3 níveis monofásico
2.1 Princípio de funcionamento e modelo matemático
do conversor
Para demonstrar o funcionamento do inversor
NPC 3 níveis com diodo de grampeamento, as tensões nos capacitores do barramento CC são consideras equilibradas e constantes, com valores iguais a
Vcc/2. O acionamento dos semicondutores controlados é definido de acordo com o semi-ciclo do sinal
senoidal de referência. Desta maneira, o semi-ciclo
positivo da tensão de saída é definido pelo par S1-S2,
enquanto o semi-ciclo negativo por S3-S4, onde de
acordo com a lógica de comutação os pares S1-S3 e
S2-S4 são complementares entre si. Desta forma, no
estado onde S1 e S2 estão conduzindo, a tensão sobre
a carga possui o valor da tensão do capacitor C1.
Quando S1 entra em bloqueio, S2 é mantido em
condução onde o diodo Dg1 grampeia a tensão da
carga até que a mesma seja nula. Esse processo se
repete durante todo o semi-ciclo positivo e de maneira semelhante para o par S3 e S4 no semi-ciclo negativo.
A análise das etapas de funcionamento e a modelagem matemática da estrutura são realizadas dividindo o sistema em dois circuitos equivalentes por
semi-ciclo. Como cada um destes circuitos se comporta como um conversor Buck, o projeto do filtro
3658
Anais do XIX Congresso Brasileiro de Automática, CBA 2012.
LC de saída do inversor torna-se mais simples, pois
se baseia nas equações consolidadas para este conversor. Em (1) são apresentadas as equações de estado para o semi-ciclo positivo da tensão senoidal de
saída.
( )
( )
{
( )
( )
ção determinada para o projeto destes capacitores em
função da potência máxima e oscilação de tensão nos
capacitores é apresentada em (5) (Akagi, 1996).
(
(5)
)
Onde:
(1)
( )
Em (2) são apresentadas as matrizes no espaço
de estados do conversor.
Desta forma, pode-se definir em (6) a equação
referente a oscilação de tensão nos capacitores.
(6)
[
̇
̇
]
( )
]
( )
[
[
[
] ( )
(2)
]
( )
[
][
( )
]
( )
Com razão cíclica d(t) = (
)
(
).
A partir das equações de estado, são aplicadas
perturbações pela técnica de modelagem de mínimos
sinais. Realizando as simplificações necessárias, é
obtida a função transferência da relação entre o sinal
de tensão de saída e a razão cíclica que é apresentada
em (3).
̂(
̂
)
̂ ( )
̂( )
Sendo definido o valor da oscilação de tensão
em função da potência de saída do inversor, é possível encontrar um fator de multiplicação (
) que
relaciona o valor de pico da oscilação de tensão nos
capacitores em relação ao valor de pico da corrente
de saída do inversor.
Definindo o valor de pico como a metade do valor considerado na oscilação de tensão, tem-se:
(7)
⁄
Onde:
(
)
(3)
(8)
Com as matrizes no espaço de estado, pode-se
definir em (4) a função de transferência entre a corrente de saída e a razão cíclica.
Trabalhando-se com as equações (7) e (8) podese definir o valor de
em (9).
̂
̂(
)
̂ ( )
̂( )
⁄
[
]
(
⁄ )
(
(9)
(4)
Assim, pode-se definir em (10) a equação que
representa a corrente estimada da carga como:
( )
3 - Proposta de estimadores de corrente
Como dito anteriormente, para reduzir a quantidade de sensores envolvidos no controle, optou-se
pela eliminação dos sensores de correntes. Desta
forma, duas técnicas de se estimar a corrente de saída
do inversor são apresentadas: estimação pela oscilação de tensão dos capacitores do barramento CC e
estimação pelo modelo matemático.
Em ambas as situações, as tensões instantâneas
sobre cada capacitor do barramento CC devem ser
medidas, assim como a tensão de saída. Desta forma
as mesmas variáveis usadas para o controle de tensão
e do desbalanço dos capacitores do barramento são
utilizadas para estimação de corrente.
3.1 Estimação pela oscilação de tensão dos capacitores do barramento CC
A topologia de inversor NPC 3 níveis monofásico utilizada apresenta oscilações de tensão nos capacitores do barramento CC em diferentes amplitudes
de acordo com a corrente da carga. A amplitude desta
oscilação é considerada no projeto dos capacitores de
acordo com a potência de saída do inversor. A equaISBN: 978-85-8001-069-5
)
( )
(
)
(10)
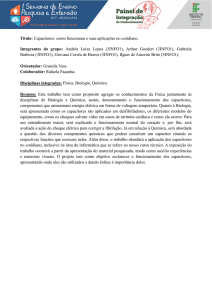
( ) é encontrado a partir das
O valor de
tensões instantâneas sobre os capacitores aplicando o
algoritmo apresentado na figura 3. É utilizado um
filtro passa-baixa de segunda ordem com frequência
de corte de 10Hz a fim de eliminar as oscilações no
( ) obtido.
valor de
vc1(t)
+
-
vc2(t)
+
-
Vcc/2
Vcc/2
+
-
Sqrt(x12+x22)
vPΔvc(t)
FPB
90º
Figura 3 – Valor de pico da oscilação de tensão nos capacitores
( ) é possível estimar o
Utilizando
( )e
valor da resistência de carga (
) , em (11), na
saída do inversor utilizando a Lei de Ohm.
=
( )
( )
(11)
3.2 Estimação pelo modelo matemático do inversor
A segunda técnica de estimação da corrente da
carga é baseada no modelo matemático do inversor.
3659
Anais do XIX Congresso Brasileiro de Automática, CBA 2012.
A partir das equações do modelo é possível obter
tanto a corrente da carga como a tensão de saída
estimada. Esta tensão estimada realimenta a malha de
controle de tensão do modelo, sendo comparada com
a tensão medida na saída. Como apresentado na figura 4.
Vref = vco
vco vc1 vc2
Controlador
de Tensão
d
Modelo
Matemático
Inverso NPC
vCoest
iLoest
Figura 4 - Estimador de corrente pelo modelo matemático
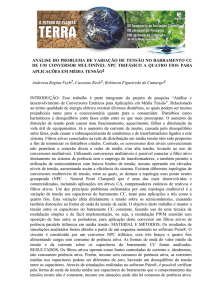
Para obter a tensão estimada com comportamento semelhante a tensão real no capacitor de saída,
devido ao possível desbalanço dos capacitores do
barramento CC, é utilizado um algoritmo demonstrado em (12). O modelo utilizado é apresentado na
figura 5.
(
( ))
( )
( )
{
( )
( )
(12)
tensão de saída e desbalanço de tensão dos capacitores são apresentadas nas figuras 1 e 2 com controladores PI e LQR, respectivamente.
Pode-se afirmar que o sinal de saída apresenta
valor médio nulo se o valor de ̅̅̅̅
também for
nulo. Outras possíveis variações do valor de ̅̅̅̅
são para valores positivos (caso a tensão de C1 for
maior que a tensão do C2) ou para valores negativos
(se a tensão de C1 for menor que a tensão do C2).
Esse deslocamento gerado na ação de controle afeta
diretamente a comutação dos semicondutores controlados, devido ao fato do sinal de referência ser senoidal.
Analisando a figura 6 é possível observar os
três possíveis casos de variação teórica do valor de
̅̅̅̅
e como essa variação afeta diretamente as
comutações dos semicondutores controlados. Primeiramente o valor de ̅̅̅̅
é nulo, ou seja, a tensão
sobre os capacitores está equilibrada. Na segunda
situação a tensão de C1 é inicialmente bem maior
que C2, seguido de uma variação menor até o equilíbrio. No terceiro caso ocorre o oposto, inicialmente a
tensão de C2 é maior no inicio.
vC1=vC
vC1=vC
vC1=vC
2
2
2
vC1>>vC
vC1>vC
vC1=vC
2
2
2
ON
vco
vc1
vc2
Co
(12)
d
1/s
vCoest
+
X
Lo
1/s
iLoest
Estado de S1
Ro
+
OFF
ON
OFF
ON
OFF
0
Figura 5 - Modelo matemático do Inversor NPC
A estimação de forma paramétrica apresenta a
corrente estimada muito próxima da corrente real de
saída, porém essa técnica fica limitada a variações de
carga. Os componentes Lo e Co do filtro de saída são
calculados como parâmetros de projeto do filtro e
não sofrem variações.
4 – Controle de desbalanço de inversor NPC 3
níveis monofásico
Sabe-se que o desbalanço entre as tensões dos
capacitores do barramento CC afeta diretamente a
simetria da tensão da saída do inversor NPC. Para a
obtenção da função de transferência, as tensões sobre
os capacitores são consideradas equilibradas e constantes iguais a Vcc/2. Essa analogia pode ser utilizada
para o projeto do controlador, porém não garante o
equilíbrio entre as tensões dos mesmos.
A estratégia adotada para manter o valor médio
dos capacitores tem como base a média da diferença
das tensões dos capacitores C1 e C2, definida como
̅̅̅̅
. O valor de ̅̅̅̅
é somado à malha de
controle agindo como um distúrbio deslocando o
sinal de controle verticalmente (offset). O modo
como a estratégia foi implementada para controle da
ISBN: 978-85-8001-069-5
vC1<<vC
vC1<vC
vC1=vC
2
2
2
0,016s
0,033s
0,050s
Figura 6 - Comandos em S1 para diferentes ̅̅̅̅
5 – Projetos das malhas de controle de tensão
e corrente utilizando corrente estimada
5.1 Controle utilizando controlador PI
Inicialmente é realizada a sintonia do PI da malha de tensão utilizando a função de transferência (3)
que relaciona a tensão de saída do inversor pela razão
cíclica, onde a ação de controle é a própria razão
cíclica quando o controle está estável. Considerando
a modelagem por semi-ciclo, utilizando a analogia
com o conversor Buck, pode-se definir a razão cíclica
como a função do ganho estático deste conversor.
O sinal gerado a partir da malha de tensão ( ) é
utilizado na malha de corrente, onde a corrente de referência expressa em (13) é comparada com a corrente
estimada.
( )
(13)
A partir da função de transferência da planta e
do compensador a ser utilizado, são definidos os
ganhos do controlador baseado em técnicas de sinto-
3660
Anais do XIX Congresso Brasileiro de Automática, CBA 2012.
nia consolidadas (Kiam, 2005). A tabela 1 apresenta
os ganhos utilizados nos controladores PI’s da malha
de tensão e de corrente.
Tabela 1. Ganhos dos controladores de Tensão e Corrente.
Ganhos
Tensão
Corrente
Ki
Kp
15
0,005
50
0,5
5.2 Controle utilizando Regulador Quadrático Ótimo
O controlador LQR é um controlador ótimo que
fornece de maneira sistemática o cálculo da matriz de
ganho de controle por realimentação de estados. Este
tipo de controlador requer que as variáveis de estados
sejam todas mensuráveis, fato que torna essencial a
aplicação de estimadores de variáveis.
Considerando um sistema de equações no espaço
[ ]
de estado ([ ̇ ]
), o objetivo do controlador é minimizar a função custo, apresentada em (14)
(Hasanzadeh, 2011).
∫ (
)
(14)
As matrizes Qnxn e Rnxn geralmente são matrizes
diagonais definidas a fim de resolver a equação matricial reduzida de Riccati (15). Pode existir n soluções para um sistema, onde P deve ser sempre uma
matriz definida como positiva.
(15)
A lei de controle definida por ( ), representada
em função de K é expressa em (16).
( )
( )
( )
( )
[
]
(17)
6 – Resultados de simulações
Para verificação das metodologias apresentadas,
foram realizadas as simulações de um Inversor NPC
3 níveis Monofásico com potência de 1KW. Os parâmetros do conversor são apresentados na tabela 2.
As tensões iniciais sobre cada capacitor são consideradas equilibradas e igual à metade da tensão do
barramento CC.
Tabela 2. Parâmetros utilizados.
Parâmetros do projeto
Valor
Tensão de barramento
C1 e C2
L0
C0
R0
1000V
166µF
19,5mH
2,6 µF
48 Ω
Para realimentação da malha de corrente optouse pelo uso do estimador baseado na oscilação da
tensão sobre os capacitores do barramento CC. Definida a oscilação da tensão de cada capacitor em 10%
da sua tensão média, a partir da potência de saída e
através a equação (9) é obtido o valor de kiest=0,12
para estimação de corrente.
Para verificar a ação dos controladores, são aplicadas perturbações na entrada e na saída do inversor.
A simulação realizada é divida em 5 intervalos, apresentados na tabela 3.
(16)
O sistema no espaço de estados do conversor
apresenta duas variáveis. Sendo assim, a matriz Q é
do tipo 2x2 e R do tipo 1x1. Geralmente utiliza-se a
matriz R1x1=1. Neste caso, a matriz diagonal Q2x2 foi
definida baseada nos ganhos utilizados nos controladores PI’s. Dividindo os ganhos proporcionais pelos
integrativos obteve-se q11=0,01 e q22=0,0003.
Utilizando um algoritmo de cálculo, foram definidos os ganhos Ki=0,0064 e Kv=0,43. Através de
simulação computacional, foi verificado que, embora
o desempenho do conversor fosse satisfatório, a
frequência de comutação dos semicondutores apresentou valores difíceis de serem implementados em
laboratório. Realizados os ajustes necessários, definiu-se ganhos uma década abaixo dos valores encontrados, definidos como Ki=0,00064 e Kv=0,043. Com
estes valores, o desempenho do conversor foi mantido sem comprometer a dinâmica física do conversor
e dos componentes.
A figura 2 apresenta o diagrama elétrico do controlador LQR com estimadores de corrente aplicado
ao inversor NPC. A lei de controle expressa em (17)
demonstra que a partir do instante que o erro de tensão e corrente forem nulos, a ação de controle é a
própria razão cíclica de referência.
( )
Tabela 3. Sequência de simulação.
Intervalo
Tempo (s)
Vreferência
Carga
1
2
3
4
5
0 até 0,2
0,2 até 0,4
0,4 até 0,6
0,6 até 0,8
0,8 até 1
311V
311V
311V
180V
311V
48Ω
72Ω
48Ω
48Ω
48Ω
A figura 7 apresenta a forma de onda obtida em
simulação da tensão de saída do inversor NPC 3
níveis, onde se pode observar a oscilação na tensão
de saída calculada no projeto dos capacitores do
barramento CC.
Vcc/2
0
-Vcc/2
Figura 7 - Tensão de Saída do Inversor NPC 3 níveis
ISBN: 978-85-8001-069-5
3661
Anais do XIX Congresso Brasileiro de Automática, CBA 2012.
Os resultados obtidos no primeiro intervalo simulado com a referência de tensão de saída em 311V
são apresentados na figura 8. As respostas com controle PI e LQR são apresentadas respectivamente.
vCO
iLO
311V
(a)
0
-311V
0
0,016s
311V
(b)
0,033s
0,050s
0,066s
vCO
iLO
iLO
0,8s
0,816s
0,833s
0,8s
0,816s
0,833s
vCO
iLO
Figura 12 - Detalhe intervalo5: (a) PI; (b) LQR
0,016s
0,033s
0,050s
0,066s
Figura 8 - Detalhe intervalo1: (a) PI; (b) LQR.
A figura 9 apresenta os resultados obtidos no
segundo intervalo simulado onde é dado um degrau
de carga, alterando de 48Ω para 72Ω.
vCO
311V
iLO
(a)
50
(a) 0
0,2s
vCO
-50
0,216s
-100
0
iLO
311V
(b)
A figura 13 apresenta a comparação entre os valores de ̅̅̅̅
. A cada distúrbio simulado é visto
que o valor médio de tensão dos capacitores sofrem
alterações. Como os valores de ̅̅̅̅
são utilizados
nas malhas de controle de desbalanço de tensão, o
ideal é que este valor se anule o mais rápido possível
demonstrando que a tensão média nos capacitores
está equilibrada.
0
-311V
0,183s
0
0,216s
0,3s
0,4s
0,5s
0,6s
0,7s
0,8s
0,9s
1s
0,1s
0,2s
0,3s
0,4s
0,5s
0,6s
0,7s
0,8s
0,9s
1s
-50
-100
0
O terceiro intervalo simulado onde é dado um
degrau de carga retornando as condições iniciais, é
apresentado na figura 10.
vCO
311V
iLO
Figura 13 - Valor de ̅̅̅̅
: (a) PI (b) LQR
A figura 14 apresenta o detalhe da tensão sobre
o capacitor de saída de ambas as simulações comparadas com a referência de tensão.
311V
0
311V
0,2s
(b) 0
0,2s
Figura 9 - Detalhe intervalo2: (a) PI; (b) LQR.
-311V
0,385s
0,1s
50
-311V
0,183s
(b)
311V
180V
(b)
0
-180V
-311V
0,785s
vCO
0
-311V
0
(a)
311V
180V
(a)
0
180V
-311V
0,785s
vCO_PI
vCO
iLO
0,4s
0,416s
0,433s
0
vCO_ref
vCO_LQR
0
-311V
0,385s
0,4s
0,416s
-311V
0,433s
Figura 10 - Detalhe intervalo3: (a) PI; (b) LQR.
Figura 14 - Tensões sobre capacitores de saída versus a referência
A figura 11 apresenta o quarto intervalo simulado onde é alterada a referência da tensão de saída
de 311V para 180V.
vCO
311V
iLO
180V
(a)
0
180V
-311V
0,585s
311V
180V
(b)
0
-180V
-311V
0,585s
vCO
iLO
0,6s
0,616s
0,633s
A figura 15 apresenta o detalhe inicial da corrente estimada comparada com a corrente de saída
real do conversor. São apresentadas respectivamente
as correntes obtidas a partir dos estimadores nas
simulações com controle PI e LQR.
10A
(a)
0
0,6s
0,616s
0,633s
O quinto intervalo simulado, apresentado na figura 12, onde é alterada novamente a referência da
tensão de saída.
ISBN: 978-85-8001-069-5
Estimada
i
Real
i
Estimada
Lo
0,1s
0,2s
10A
(b)
Figura 11 - Detalhe intervalo4: (a) PI; (b) LQR.
Real
i
Lo
-10A
0
i
Lo
0
Lo
-10A
0
0,1s
0,2s
Figura 15 - Detalhe degrau inicial: (a) PI; (b) LQR.
3662
Anais do XIX Congresso Brasileiro de Automática, CBA 2012.
Na figura 16 é mostrado o detalhe da corrente
estimada e da corrente real no instante onde ocorre a
perturbação do sinal de referência da tensão saída. As
correntes obtidas com estimadores em simulações
com controle PI e LQR são apresentadas respectivamente.
10A
(a)
0
Real
i
Estimada
i
Real
i
Estimada
Lo
Lo
-10A
0,55s
i
0,6s
0,65s
0,7s
10A
(b)
Lo
0
Lo
-10A
0,55s
0,6s
0,65s
0,7s
Figura 16 - Detalhe degrau de referência do sinal de saída (a): PI;
(b) LQR.
6 Conclusão
Analisando a forma de tensão de saída e as repostas aos distúrbios, pode-se afirmar que ambos os
controladores mostraram-se eficazes em manter tanto
o equilíbrio de tensão sobre os capacitores do barramento CC quanto à tensão de saída do inversor.
A realimentação da malha de corrente utilizando corrente estimada apresentou resultados eficientes
validando a técnica proposta. As técnicas estudadas
apresentam resultados satisfatórios ao que foram
propostas, podendo reduzir a quantidade de sensores
aplicados à saída do conversor para o controle tanto
da tensão como de corrente.
Outro fator a ser destacado é a redução do erro
apresentado pelo controlador LQR quanto ao ângulo
de fase do sinal de referência e a tensão obtida na
saída do inversor. Essa característica é muito interessante em determinadas aplicações quando a saída do
inversor pode ser acoplada com a rede elétrica.
Estudos estão sendo realizados para expandir as
técnicas de estimação de correntes propostas para
sistemas trifásicos, visto que essas estruturas são
mais comuns em aplicações práticas. Desta maneira
seriam reduzidos os custos com sensores e consequentemente o de condicionamento de sinais.
Referências Bibliográficas
Akagi, Hirofumi; Nabae, Akira; Atoh, Satoshi; ,
"Control Strategy of Active Power Filters Using
Multiple Voltage-Source PWM Converters," Industry Applications, IEEE Transactions
on , vol.IA-22, no.3, pp.460-465, May 1986
Braga, H. A. C.; Barbi, I... Conversores estáticos
multiníveis – Uma revisão. SBA Controle&Automação Vol. 11 no. 01 2000 p.20-27
Fujii, K.; De Doncker, R.W.; , "A novel DC-link
voltage control of PWM-switched cascade cell
multi-level
inverter
applied
to
STATCOM,"Industry Applications Conference,
ISBN: 978-85-8001-069-5
2005. Fourtieth IAS Annual Meeting. Conference Record of the 2005, vol.2, no., pp. 961967 Oct. 2005
Hasanzadeh, A.; Edrington, C. S.; Mokhtari, H.; , "A
novel LQR based optimal tuning method for
IMP-based linear controllers of power electronics/power systems," Decision and Control and
European Control Conference (CDC-ECC),
2011 50th IEEE Conference on, pp.7711-7716,
12-15 Dec. 2011
Kiam Heong Ang; Chong, G.; Yun Li; , "PID control
system analysis, design, and technology," Control Systems Technology, IEEE Transactions
on, vol.13, no.4, pp. 559- 576, July 2005
Lai, J-S.; Peng, F. Z. Multilevel converters: a new
breed of power converters. IEEE Transactions
on Industry Application, v. 32, n. 3, p.509-517,
May/Jun 1996
Lei Lin; Yunping Zou; Zhan Wang; Hongyuan Jin; ,
"Modeling and Control of Neutral-point Voltage Balancing Problem in Three-level NPC
PWM Inverters," Power Electronics Specialists
Conference, 2005. PESC '05. IEEE 36th, vol.,
no., pp.861-866, 16-16 June 2005
Nabae, A.; Takashi, I.; Akagi, H.A new neutralpoint-clamped PWM inverter.IEEE Transactions on Industry Application, IA-17, n. 5,
p.518-523, Sep/Oct. 1981.
Oliveira JR, A. S. de; Silva, E. R. da; Jacobina C. B.
Uma abordagem simplificada para modulação
por largura de pulso em inversores multiníveis
com controle das tensões nos capacitores do
barramento CC. Eletrônica de Potência, Vol. 10
no.2, novembro 2005 p.57-65
Pinheiro, H.; Cardoso, R.; Duarte, M. H.; Modulação
e Controle de retificadores/inversores monofásicos multiníveis NPC. In: XV Congresso Brasileiro de Automática – CBA 2004
Pinheiro, H.; Grigoletto, F. B. Método de modulação
pwm para equilíbrio das tensões dos capacitores
do barramento CC em conversores multiníveis
com diodo de grampeamento. Eletrônica de Potência. Vol 14, no. 2, maio 2009 p.63-74
Rodriguez, J.; Lai, J.-S.; Peng, F. Z. Multilevel inverters: a survey of topologies, control, and application. IEEE Transactions on Industrial Electronics, v.49 n.4, p.724-738, Aug 2002
Xinchun L.; shan G.; Li, J.; He L.; Yong K. A new
control strategy to balance neutral-point voltage
in three-level NPC inverter.Power Electronics
and ECCE Asia (ICPE & ECCE), 2011 IEEE
8th International Conference on , vol., no.,
pp.2593-2597, May 30 2011-June 3 2011
Yoon-Hyuk,Ko; Byoung-Gun Park; Rae-Young
Kim; Dong-Seok Hyun; HA-JIN Jung. A simple space vector PWM scheme with neutral
point balancing for three-level neutral point
clamped inverterIndustry Applications Society
Annual Meeting (IAS), 2011 IEEE , vol., no.,
pp.1-6, 9-13 Oct. 2011
3663
Anais do XIX Congresso Brasileiro de Automática, CBA 2012.
Zhang, L.; Watkins, S.J.; Shepherd, W.; , "Analysis
and control of a multi-level flying capacitor inverter," Power Electronics Congress, 2002.
Technical Proceedings. CIEP 2002. VIII IEEE
International , vol., no., pp. 66- 71, 20-24 Oct.
2002
ISBN: 978-85-8001-069-5
3664