1
Sistema Implementação de Estabilizadores de
Sistemas de Potência em Sistemas de Excitação
de Geradores Síncronos da UHE de Tucuruí
C. T. da Costa Jr., UFPA; W. Barra Jr., UFPA; M. N. Moutinho, UFPA;
J. A. L. Barreiros, UFPA; J. D. Salgado, UFPA;
Resumo – Este trabalho tem por objetivo a implementação
prática de um compensador supervisionado por lógica fuzzy,
usando a estrutura de um controle adaptativo a ganhos programáveis. O sistema de supervisão fuzzy consiste de um conjunto de leis de inferência fuzzy do tipo SE-ENTÃO realizadas
por um sistema Takagi-Sugeno. Essas leis atuam sobre uma
Rede de Compensadores Locais (RCL), formada por um conjunto de controladores linearizados para diferentes pontos de
operação do sistema controlado. O objetivo do supervisor é
sintetizar, por meio de uma combinação linear dos controladores da RCL, a lei de controle que melhor se adapte ao ponto
operacional atual do sistema, durante o funcionamento do sistema. Para exemplificar a aplicabilidade prática dessa estratégia de controle e comparar seu desempenho com estratégias de
controle convencionais, é projetado um Estabilizador de Sistema de Potência (ESP) supervisionado por lógica fuzzy, cuja
implementação é realizada através de um sistema de controlador digital embutido. Os resultados mostram os bons resultados obtidos com a estratégia proposta.
Palavras-chave — Sistemas Fuzzy, Rede de Compensadores
Locais, Controle Adaptativo a Ganhos Programáveis.
I. INTRODUÇÃO
Geralmente, a linearização é uma das técnicas mais
amplamente utilizadas para análise e projeto de sistemas de
controle não-lineares. A linearização em torno de um ponto
de operação fixo produz um modelo linear local, para o qual
um controle pode ser projetado por métodos de controle
linear convencionais. Entretando, qualquer mudança nas
condições de operação do sistema poderá conduzir a
mudanças no modelo linearizado, causando uma
deterioração no desempenho do sistema em malha fechada.
Para evitar isto, os parâmetros do controlador precisam ser
modificados em resposta a variações das características da
planta e/ou do ponto de operação. O desempenho do sistema
de malha fechada irá depender dessas variações
paramétricas e será satisfatório se a representação dessas
variações forem precisas. Quando as relações entre os
parâmetros do modelo linear e os pontos de operação são
conhecidas com exatidão e os pontos de operação podem ser
medidos, então as variações paramétricas são
completamente especificadas. Freqüentemente, essas
relações são funções não lineares, desconhecidas e
complicadas. Mas, ao menos para alguns sistemas, os pontos
de operação podem ser medidos ou inferidos. Para este tipo
de sistema não linear, se o modelo linear, para um ponto de
operação fixo, é chamado de representação local do sistema,
então a representação global do sistema pode ser realizada
via um conjunto de modelos locais parametrizados
correspondendo a diferentes pontos de operação. Em outras
palavras,pode-se expressar globalmente certos sistemas não
lineares como um conjunto de sistemas lineares cujos
parâmetros são funções não lineares desconhecidas de seus
pontos de operação (Wang., 1994). Esse conjunto de
modelos lineares dependentes do ponto de operação é
chamado de Redes de Modelos Locais (RML) (Hunt et al.,
1997).
Como uma conseqüência direta da RML, que concerne o
modelo do sistema controlado, existe uma estrutura de
controle não linear conhecida como uma Rede de
Compensadores Locais (RCL) (Júnior et al, 1999; Júnior,
1999). Esta estrutura consiste em uma combinação de um
número finito de compensadores individuais, cada um
dentre eles sendo válido (com melhor desempenho)
localmente, de acordo com o ponto de operação. Então, para
um ponto de funcionamento qualquer, o sinal de controle
resultante será sempre uma interpolação não linear dos
sinais de controle que os compensadores individualmente
projetados para os pontos de funcionamento mais próximos
produziriam.
Neste trabalho, para o projeto de controle de sistemas não
lineares, é usada uma estrutura similar à do controle adaptativo a ganhos programáveis (Aström and Wittenmark, 1995;
Aström and Wittenmark, 1990), mas, em vez de se realizar
uma mudança brusca dos parâmetros do controlador, que
por si só é uma fonte de instabilidade (Limebeer, 1979),
usa-se uma estratégia diferente que altera esses parâmetros
de forma suave através de um sistema de supervisão baseado em lógica fuzzy (Wang, 1997) sobre uma rede de compensadores locais. Essa estratégia consiste primeiramente
em escolher diversos pontos de operação do sistema. Para
cada ponto, é encontrado um modelo linear utilizando em
um algoritmo de identificação não recursivo do tipo erro na
saída (Lijung, 1987). Baseado nesse modelo projeta-se um
compensador linear local para cada ponto de operação, utilizando a técnica de alocação de pólos (Landau, 1993). O
conjunto de compensadores é utilizado para construir uma
RCL, a qual é armazenada em uma tabela. Em operação, a
cada instante discreto o supervisor identifica o ponto de
operação e atualiza os parâmetros do compensador baseado
em um sistema fuzzy de Takagi-Sugeno (Wang, 1997). Aqui, essa técnica é aplicada na implementação de um estabi-
2
lizador de sistemas de potência (ESP) para melhorar a estabilidade dinâmica de um turbogerador pelo aumento do torque de amortecimento. O sistema de potência é emulado por
um microcomputador PC e controlado, na prática por um
controlador, que implementa a estratégia de controle. Será
mostrado através de testes que o supervisor baseado em lógica fuzzy apresenta excelente desempenho em relação ao
controle a parâmetros fixos.
II. REDE DE COMPENSADORES LOCAIS
Considere o sistema não linear representado por
y (t ) = f [ y (t − 1), ..., y (t − na ), u (t − d ),
u (t − d − 1), ..., u (t − d − nb )] + e(t )
(1)
onde f (⋅) é uma função não linear sobre o vetor de
onde,
θ l = [al ,1 ... al ,n bl ,0 ... bl ,n ]T
a
b
(8)
*
Para cada ponto de operação ψ l , o sistema não linear (1)
pode ser representado por uma função de transferência
Al / Bl e um controlador pode ser projetado para esse ponto
de operação utilizando técnicas de controle linear. Neste
trabalho o projeto desses controladores será realizado
utilizando-se a técnica de alocação de pólos (Landau, 1993).
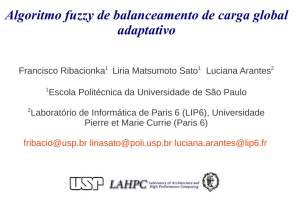
Esta estratégia de controle tem uma estrutura em malha
fechada R-S, como mostrada na figura 1. A função de
transferência do controlador será dada por:
S ( q −1 )
(9)
u (t ) = −
y (t )
R ( q −1 )
informação Ψ , definido por
Os polinômios R(q −1 ) e S (q −1 ) são definidos como
Ψ (t − 1) = [ − y (t − 1) ... y (t − na )
R (q −1 ) = 1 + r1q −1 + ... + rnr q − nr
(10)
S (q −1 ) = s0 + s1q −1 + ... + sns q − ns
(11)
u (t − d ) ... u (t − d − nb )]
T
(2)
com a saída do sistema y(t ) . Os inteiros na e nb
representam a ordem do sistema, d é o número inteiro de
períodos de amostragem contidos no atraso de transporte e
e(t ) é um sinal aleatório que corrompe os dados. Esse
modelo é conhecido como Não-linear Auto-regressivo com
Entradas Exógenas (NARX).
A equação (1) pode ser escrita na sua forma regressiva
como:
y (t ) = f [ψ (t − 1)] + e(t )
Esses polinômios são obtidos pela resolução da equação
de malha fechada do sistema, conhecida como equação
diophantina (Aström and Wittenmark, 1995):
(12)
A(q −1 ) R(q −1 ) + B(q −1 )S (q −1 ) = P(q −1 ) = PD (q −1 ) PF (q −1 )
−1
−1
−1
onde Al ( q ) , Bl ( q ) e PD (q ) são conhecidos e a solução da equação fornece R(q −1 ) e S (q −1 ) .
r(t)=0
S ( z −1 )
-
R(z −1 )
u(t)
z − d B( z −1 )
∆ω(t)
A( z −1 )
(3)
Para o sistema (1) definimos um ponto de operação
caracterizado por
ψ l* ,
onde l é um índice. Um modelo
linear do sistema em torno desse ponto é definido como um
Modelo Local [5], e pode ser representado pela seguinte
equação linear:
Al (q −1 ) y (t ) = q − d Bl (q −1 )u (t ) + e(t )
(4)
sendo os polinômios Al ( q −1 ) e B l ( q −1 )
por:
representados
Al ( q −1 ) = 1 + a l ,1 q −1 + ... + a l , na q − na
(5)
Bl (q −1 ) = bl , 0 + bl ,1q −1 + ... + bl ,nb q − nb
(6)
A equação (4) pode ser escrita na seguinte forma
regressiva, conhecida na literatura como modelo linear
Auto-Regressivo com Entradas Exógenas (ARX) (Lijung,
1987):
y (t ) = ψ (t − 1)θ l + e(t )
(7)
Figura 1: Diagrama de blocos do controlador R-S.
O conjunto de relações lineares (7) representadas sobre
um número finito de pontos de operação
ψ l*
será utilizada
para construir uma Rede de Modelos Locais (RML), que
representará de forma aproximada o sistema não linear (1).
O conjunto de modelos (13), será utilizado para projetar
uma Rede de Compensadores Locais (RCL). Dessa forma
ao invés de habilitar um dos compensadores da RCL para
realizar a lei de controle, chaveando sempre para o
compensador projetado para o ponto de operação mais
próximo do atual, tal como é feito no controle a ganhos
programáveis, neste trabalho o controlador será obtido on
line em função do ponto de operação do sistema, por um
algoritmo de supervisão, o qual será visto mais adiante,
aplicados sobre os compensadores lineares da RCL.
Entretanto, é usada uma estrutura de controle similar à do
controle adapatativo à ganhos programáveis, como mostra a
figura 2.
Para formalizar o conceito de uma Rede de Modelos
Locais considere-se que a cada instante o comportamento do
3
sistema (1) é caracterizado por um vetor ponto de operação
nφ
φ (t )∈Φ ⊂ R . O conjunto de pontos de operação Φ é
definido como domínio de operação do sistema. Define-se
também um regime de operação local como o subconjunto
Φ l ⊂ Φ caracterizado por um modelo local que rege o
comportamento do sistema nas proximidades de um dado
ponto operacional.
Para cada regime de operação está associada uma função
de validade semidefinida positiva ρ l (φ ) que determina a
validade de um modelo local l para um ponto específico de
operação φ . O número de funções de validade é nΦ . Essas
funções de validade apresentam valores próximos da
unidade para pontos φ ∈ Φ l e valores nulos para pontos
φ ∉ Φl .
Cada função de validação deve satisfazer a
φl (l = 1,..., nφ ) considerados.
No
entanto,
não
foi
explicitada na equação (16) a forma de combinação que
deve ser utilizada para obtenção do compensador. Essa
interpolação pode ser realizada através da utilização de
aproximadores não lineares universais, funções matemáticas
capazes de representar com um grau arbitrário de precisão
qualquer função não linear. Neste trabalho será utilizado um
sistema fuzzy para essa finalidade.
ri ' s e s i ' s em um ponto de
funcionamento diferente daqueles utilizados no projeto dos
compensadores da rede serão obtidos a partir de regras do
tipo SE-ENTÃO de um sistema supervisor fuzzy do tipo
Sugeno. A figura 3 ilustra o processo em que são obtidos os
parâmetros desconhecidos do compensador, ri e si, e a lei de
controle u(t).
Os coeficientes
seguinte restrição:
nΦ
∑ ρ (φ ) = 1
l
l =1
(15)
para todo
φ∈Φ .
Supervisor
+
RCL
Parâmetros do
Compensador
Referência
Compensador
Sinal de
Comando
Saída
Processo
Figura 3: Estrutura de uma rede de compensadores locais supervisionada
por lógica fuzzy.
Figura 2: Estrutura de comando a ganhos programáveis supervisionado por
lógica Fuzzy
É possível provar, após algumas manipulações algébricas,
(Júnior, 2000) que o sinal de controle produzido pela Rede
de Compensadores Locais é dado por:
nΦ
u (t ) = ∑ψ C (t )θ lC ρ l (φ (t ))
T
l =1
(16)
T
[
θlC = rl ,1 L rl ,n
r
sl ,0 L sl ,ns
]
(17)
ψ C (t ) = [− u (t − 1) L − u (t − nr ) − y (t ) L − y (t − ns )]
(18)
T
III. SUPERVISÃO BASEADA EM LÓGICA FUZZY
A equação (16) mostra que a para um número
finito nΦ de compensadores lineares locais, é possível obter,
a partir da combinação adequada desses compensadores,
uma lei de controle global quando o sistema não está
funcionando sobre um dos regimes de operação
Na primeira etapa do projeto do sistema de supervisão
dos
fuzzy o conjunto de parâmetros ri ' s e s i ' s
compensadores da rede são armazenados em uma tabela de
dados. Em seguida, através de um conjunto de regras de
inferência fuzzy, o sistema fuzzy manipula as tabelas de
dados e atribui um peso (associado às funções de validação
dos modelos) para cada um dos coeficientes. Os pesos são
calculados em função do vetor ponto de funcionamento φ
atual, que é a entrada do supervisor. Utilizando a equação
(16) o supervisor então determina o compensador
S ( z −1 )
que produz a lei de controle u(t)
R( z −1 )
Para encontrar o peso de cada um dos compensadores da
rede, o sistema deve considerar cada uma das k variáveis do
vetor ponto de funcionamento como sendo uma variável
lingüística fuzzy com universo de discurso uniformemente
particionado em ni conjuntos fuzzy (V1,i , V2,i , ... , V1,ni ) , de
tal forma que cada variável lingüística, em um dado instante
de tempo t , terá um valor de pertinência µVi , j (Vi (t ))
associado a cada um de seus ni conjuntos fuzzy. Por
simplicidade, as funções de pertinência utilizadas foram do
4
tipo triangulares e trapezoidais, sendo que as trapezoidais
foram utilizadas apenas nos dois conjuntos extremos,
conforme mostra a figura 4. É fácil verificar que, para cada
uma das variáveis fuzzy, no máximo dois e no mínimo um
conjunto fuzzy terão valores de pertinência diferentes de
zero e a soma desses valores será sempre igual a um (Da
Costa Júnior, 1999).
O próximo passo é definir as regras de lógica fuzzy do
sistema Fuzzy- Sugeno usando as variáveis lingüísticas do
vetor φ (t ) . Cada regra de supervisão R(l) terá a seguinte
forma:
E
l
< Vk = V
l
k,p
1,i
nΦ
n1
l =1
i =1
∑ wl = ∑ µV l (V1 ) x
1, i
n2
∑µ
j =1
V2l , j
(V2 )
np
∑µ
x ... x
p =1
Vkl , p
(Vk )
(22)
∑µ
ENTÃO c l é z
j =1
onde l = 1, ... nΦ ; i = 1, ... n1 ; j = 1, ... n2 ; p = 1, ... nk ; z é
um valor real e o número total destas regras (número total
de pontos ou regime de operação), chamado nφ , é o número
total de compensadores de uma RCL. Este número é dado
por:
k
(19)
(21)
O denominador da equação (20) a partir de (21) pode
então ser expresso por:
ni
i =1
k ,p
φ (t ) , vale a expressão:
>
nφ = n1 × n2 × ... × nk = ∏ ni
2, j
Assim, dado que, para qualquer variável lingüística
R(l) : SE < V1 = V1,i > E < V2 = V2, j >
l
wl = µV l (V1 ) x µV l (V2 ) x ... x µV l (Vk )
Vil, j
(Vi ) =1
Vi ∈
(23)
Então, obtém- se que
nΦ
∑w
l
=1
(24)
l =1
Assim a equação (20) simplifica para:
nφ
c(φ (t )) = ∑ wl c l
(25)
l =1
Portanto, a partir das equações acima, pode-se enunciar os
seguintes teoremas (Da Costa Júnior, 1999):
µ[Vi (t)]
Teorema 1: O peso wl da premissa R(l) em relação ao ponto
de operação φ (t ) pode ser usado como a função de
1
validade
•••
0
Vi,1 Vi,2 Vi,3
Vi, n i − 2
ni
Figura 4: Funções de pertinência para os
de uma RCL.
Teorema 2: O sistema fuzzy de Takagi- Sugeno pode inVi(t) terpolar suavemente os coeficientes dos compensadores da
Vi, n i −1Vi, n i
RCL a fim de produzir a saída do sistema compensado, dado
pela Equação (16).
e conjuntos fuzzy associados à
variável Lingüística
c(φ (t )) =
∑w c
l =1
nφ
IV. RESULTADOS
Vi .
Para cada ponto operacional φ (t ) , o compensador atual
c = g (φ (t )) é obtido pela média ponderada:
nφ
ρ l (φ ) , definido na seção 2, do l-ésimo elemento
l l
∑w
Para avaliar o desempenho do supervisor fuzzy proposto
neste trabalho foi realizado o projeto de um Estabilizador de
Sistema de Potência (ESP) que foi aplicado sobre o sistema
máquina síncrona-barra infinita, descrito na Figura 4. O
modelo matemático da máquina síncrona é o modelo 4
descrito em (Arrilaga, 1983 )
l
l =1
(20)
O compensador atual do sistema é o resultado da média
da parte ENTÃO de cada regra da base do sistema
ponderada pelo correspondente valor global da sua premissa
SE, representado pelos pesos wl . Esses pesos são
calculados em função do ponto de operação atual φ (t )
como:
Gerador
Sícrono
VT
L.T.
L.T.
V∝∠00
Barramento
Infinito
Figure 5: Sistema Máquina-Barra Infinita.
O sistema de excitação utilizado é descrito na figura 6.
Corresponde ao tipo 1 descrito em [IEEE, 1981]. A função
5
de transferência contínua Hex(s) do sistema de excitação é
dada por:
H Ex (s)
Ka
Ta s + 1
Vref+VS-Vt
(26)
K a
1 + Ta s
onde os polinômios R ( z −1 ) e S ( z −1 ) são encontrados a
partir da resolução da equação (12), substituindo o operador
q pela variável z.
Efd
Limitad
Figura 6: Sistema de Excitação
O diagrama de blocos desse sistema é mostrado na figura
6. Os limites do limitador são 6 e –6. Os demais parâmetros
da máquina síncrona e do sistema de excitação são dados na
Tabela 1.
Tabela 1: Dados do Sistema Máquina Síncrona Barra Infinita e do Sistema
de Excitação: resistências e reatâncias em pu (base de 100MVA), e constantes de tempo em seg.
X 'd 0.316
R a 0.001 Tdo' 5.26
X d 1.445
X ''d 0.179
D
X q 0.959
X 'q' 0.162
R e 0.02
K a 200
Ta 0.03
H
Xe
4.27
0.415
0.000
Tdo'' 0.028
Tqo'' 0.157
Figura 8: Estrutura da implementação prática do E
Para efeito de comparação, foi projetado um ESP digital a
parâmetros fixos, com a mesma estrutura da Eq. (26), para o
ponto operacional Po = 0,75 e Qo = 0,1.
O ESP supervisionado por lógica fuzzy proposto neste
trabalho e o ESP convencional a parâmetros fixos foram
implementados no controlador industrial de plataforma
embutida de uso geral, modelo 8411, fabricado pela
ICPCON mostrado na figura7.
Para o projeto do ESP supervisionado por lógica fuzzy
escolheu-se os sinais de Potência Ativa, P e Reativa, Q para
compor as variáveis lingüísticas do vetor ponto de
funcionamento do sistema. O intervalo de valores de 0 a 1.2
pu (base 100MVA) foi escolhido como a faixa de variação
do sinal P. Para o sinal Q, a faixa vai de –0.2 a 0.8 pu. Cada
um desses universos de discursos foi particionado
uniformemente em 7 funções de pertinência triangulares e
trapezoidais, de forma semelhante ao mostrado na figura 4,
totalizando dessa forma 49 pontos de interseção que
formaram os modelos da RML do sistema. Cada modelo foi
identificado off line pelo método de identificação
paramétrica dos Mínimos Quadrados não recursivo. A
entrada do modelo é a variação do sinal de referência do
sistema de excitação e a saída é o desvio de velocidade da
máquina ∆ω r . O modelo paramétrico escolhido é da
seguinte forma:
(b0 + b1 z −1 + b2 z −2 + b3 z −3 ) z −1
B ( z −1 )
=
−1
A( z ) 1 + a1 z −1 + a 2 z − 2 + a 3 z −3 + a 4 z − 4
(27)
O intervalo de amostragem do modelo foi de 50ms. Para
cada um dos modelos (27) da RML foi projetado um ESP a
parâmetros fixos utilizando-se o método de alocação
de pólos, conforme descrito no item 2, formando uma
RCL. O modelo dos controladores foi o seguinte:
S ( z −1 ) g 0 + g 1 z −1 + g 2 z −2 + g 3 z −3
=
R( z −1 )
1 + h1 z −1 + h2 z − 2 + h3 z −3
(28)
Figura 7: Controlador Industrial 8411 utilizado na implementação do supervisor fuzzy.
Para avaliar o desempenho do ESP foram realizados dois
testes de simulações de faltas severas sobre o sistema
máquina síncrona barra infinita, realizados em laboratório
utilizando-se a estrutura mostrada na figura 8.
Um microcomputador PC será utilizado para simular o
modelo dinâmico do sistema máquina síncrona barra infinita
mostrado na figura 5. Através de uma placa de aquisição de
dados ADA 812-PG e um sistema de condicionamento digital de sinais, o microcomputador comunica-se com o controlador enviando os sinais de potência ativa P, potência reati-
6
va Q e o sinal de desvio de velocidade ∆ω r através dos
conversores D/A da placa, e lê, através dos conversores
A/D, o sinal do estabilizador V S .
O sistema de condicionamento de sinais é formado por
circuitos de acoplamento e isolação para realizar o casamento de impedâncias entre os conversores do controlador e da
placa ADA e por filtros anti-aliasing. O programa de supervisão fuzzy foi implementado no controlador 8411 utilizando a linguagem de programação C. A cada 50ms o controlador efetua a seguinte seqüência de ações: 1) lê os canais
dos conversores A/D para obter os valores de P, Q e ∆ω r ;
2) formula a lei de controle do tipo (28) utilizando o algoritmo de supervisão fuzzy; e 3) aplica o sinal estabilizador
V S no sistema.
O primeiro teste consiste no aumento de 30% no valor da
referência de potencia mecânica do sistema no instante t=5s.
O ponto de operação inicial é (Po ,Qo) = ( 0.75, 0.2). Após o
sistema se restabelecer em uma nova condição operacional,
é aplicado um curto-circuito trifásico com uração de 50 ms,
em t = 15s. A figura 9 mostra os resultados das curvas dos
ângulos rotores deste teste, para os casos: a) sistema
operando com o ESP digital a parâmetros fixos; e b) sistema
operando com o ESP supervisionado por lógica fuzzy.
Operando com o ESP a parâmetros fixos ou com o ESP
supervisionado por lógica fuzzy o sistema responde bem à
primeira falta apresentando um bom amortecimento. Isso
ocorre porque a falta acontece no mesmo ponto de
funcionamento para o qual o ESP a parâmetros fixos foi
projetado. Na segunda falta a resposta do sistema com o
ESP a parâmetros fixos é um pouco mais oscilatória que a
resposta do ESP supervisionado por lógica fuzzy porque
ocorreu uma pequena mudança no ponto de operação do
sistema. No entanto, como essa mudança não foi muito
significativa a resposta dos dois ESP não foi tão diferente.
As vantagens da utilização de um ESP com capacidade
adaptativa, como o proposto neste trabalho, ficam evidentes
quando o sistema de potência opera em um ponto de
funcionamento distante daquele utilizado para o projeto do
ESP a parâmetros fixos convencional. Especificamente,
quando o sistema passa a operar com valores negativos de Q
e valores de P positivos e altos, existe grande necessidade
da utilização de sinais estabilizantes auxiliares no sistema de
excitação da máquina síncrona para o que a mesma
apresente uma margem de estabilidade adequada e não perca
o sincronismo com o restante do sistema após o transitório
que sucede uma falta severa.
O teste 2 contempla uma contingência operacional dessa
natureza. Ele consiste na redução de 20% na referência de
tensão terminal do sistema no instante t=5s, com o sistema
operando nas mesmas condições operacionais anteriores, (Po
,Qo) = ( 0.75, 0.2), seguido de um curto circuito trifásico de
duração 50ms em t = 15s. Na Figura 10, são mostradas as
curvas dos ângulos dos rotores para o sistema: a) sistema
com ESP digital a parâmetros fixos; e b) sistema compensado pelo ESP com ganhos supervisionados por lógica fuzzy.
Mesmo o sistema operando com um ESP digital a
parâmetros fixos ocorre à perda de sincronismo após a
primeira falta devido à mudança brusca no ponto
operacional do sistema. O ESP supervisionado por lógica
fuzzy consegue responder de forma excelente as duas
perturbações mantendo o sincronismo do sistema e
amortecendo muito bem as oscilações eletromecânicas
transitórias decorrentes das faltas. Esse teste evidencia a
superioridade do ESP digital proposto neste trabalho em
relação a um ESP a parâmetros fixos convencional.
Figura 9: Ângulo do rotor (graus) para o teste 1
Figura 10: Ângulo do rotor (graus) para o teste 2
7
V. CONCLUSÕES
O ESP proposto neste trabalho utiliza um sistema de
inferência fuzzy, do tipo Sugeno, que atua sobre um
conjunto de compensadores projetados para diferentes
condições operacionais do sistema (RCL) armazenados na
memória de um controlador industrial, sob a forma de uma
tabela de dados. O sistema de supervisão fuzzy proposto
consegue atualizar os parâmetros do ESP, para qualquer
ponto operacional do sistema, a cada 50ms. Este ESP é
capaz de melhorar bastante a estabilidade dinâmica do
sistema mesmo quando o mesmo é submetido a uma falta de
gravidade elevada que o leve a operar em uma região de
funcionamento muito distante da condição operacional préfalta (como ficou evidenciado no teste 2). Nessas condições,
um ESP a parâmetros fixos convencional apresenta uma
resposta instável já que este tipo de ESP apresenta uma
resposta boa somente para pontos de funcionamento
próximos ao ponto de operação que foi utilizado no seu
projeto. Quando os pontos de operação pré-falta e pós-falta
são próximos ao ponto onde os ESP convencional foi
projetado, este ESP e o ESP proposto apresentam
desempenhos parecidos.
Deve ser enfatizado que o estabilizador proposto aqui foi
facilmente projetado, com o uso de um controlador industrial, o qual já vem sendo utilizado nos modernos reguladores
automáticos de tensão de geradores síncronos. A carga
computacional de síntese desses ESPs é baixa, em comparação a de ESPs adaptativos que envolvem a estimação permanente dos parâmetros do sistema, podendo o mesmo controlador usar o tempo economizado para a realização de
outras tarefas, como monitoração, diagnóstico, alarme e
outros controles do sistema.
VI. REFERÊNCIAS BIBLIOGRÁFICAS
[1]
Anderson, P. M. and Fouad, A. A. (1977). Power Sistem Control and
Stability, vol I. Science Press.
[2] Arrilaga, J.; Arnold, C. P. and Harker, B. J. (1983). Computer Modelling of Eletrical Power Systems. John Wiley & Sons.
[3] Aström,K. J. and Wittenmark,B. (1995). Adaptive Control. Addison
Wesley, Reading, Massachusetts, Second Edition.
[4] Aström,K. J. and Wittenmark,B. (1990). Computer-Controllers Systems: Theory and Desing. Prentice-Hall, Second Edition.
[5] Da Costa Júnior, C. T.; Barreiros, J.A.L; Pierrat, L and Kueny, J.L.
(1999). Stabilisateurs de Systemes de Puissance avec Gains Supervisés par Logique Fluo. Simpósio Brasileiro de Automação Inteligente.
[6] Da Costa Júnior, C. T. (1999). Métodos de Comando Adaptativo de
Supervisão para Regulação de um Gerador Acoplado a uma Turbina
Hidráulica. Tese de doutorado, Institut National Polytechnique de
Grenoble..
[7] Da Costa Júnior, C. T.; Barreiros, J.A.L; Picard, Daniel Brun and
Junior, Walter Barra (2000). Adaptive Controller Adjusted by a Fuzzy
Logic Based Supervisor from a Local Model Network. IFAC-MIM
2000 Symposium.
[8] Gross, Charles A. (1986). Power System Analysis. Second Edition.
New York: John Wiley & Sons Inc.
[9] Hunt, K. J. and Johansen, T. A. (1997). Desing and Analysis of GainScheduled Control Using Local Controller Networks. International
Journal of Control, Vol. 66, Nº 5, pp.619-651.
[10] IEEE Committee Report. (1981). Excitation System Models for Power
Systems Stability Studies. IEEE Transactions on Power Apparatus and
Systems, v.PAS-100, n.2, pp. 494-509.
[11] Kundur, Prabha. (1994). Power Systems Stability and Control.
McGraw-Hill Inc.
[12] Landau, I. D. (1993). Identification et commande de Systemes. Treite
des Nouvelles Tecnologies, Seire Automatique. Ed. Hermes,
Deuxième Edition.
[13] Limebeer, D.J; Harley, R.G. and Natrass, H.L. (1979). Agile Computer Control for Synchronous Machines. Proc IEE, Vol.126, No. 5,
pp 385-392.
[14] Ljung, L. (1987). System Indentification: Theory for the User. Prentice-Hall International, Inc.
[15] Wang, L. X. (1994). Adaptive Fuzzy Systems e Control: Design e
Stability Analysis. PTR Prentice Hall, Englewood Cliffs, New Jersey.
[16] Wang, L. X. (1997). A course in Fuzzy Systems and Control. PrenticeHall International, Inc.