UNIVERSIDADE FEDERAL DE OURO PRETO
ESCOLA DE MINAS
COLEGIADO DO CURSO DE ENGENHARIA DE
CONTROLE E AUTOMAÇÃO - CECAU
ROBSON LAGE FIGUEIREDO
Sistema de Controle para Balanceamento de Cargas no
Secundário do Transformador
MONOGRAFIA DE GRADUAÇÃO EM ENGENHARIA DE CONTROLE E
AUTOMAÇÃO
Ouro Preto, 2009
Robson Lage Figueiredo
Sistema de Controle para Balanceamento de Cargas no
Secundário do Transformador
Monografia apresentada ao Curso de
Engenharia de Controle e Automação
da Universidade Federal de Ouro Preto
como parte dos requisitos para a
obtenção do Grau de Engenheiro de
Controle e Automação.
Orientador:
Dr. Paulo Marcos de Barros Monteiro
Ouro Preto
Escola de Minas – UFOP
Dezembro/2009
F476s
Figueiredo, Robson Lage.
Sistema de controle para balanceamento de cargas no
secundário
do transformador [manuscrito] / Robson Lage Figueiredo. –
2009.
58 f. : il. color. ; tab.
Orientador: Prof. Paulo Marcos de Barros Monteiro.
Monografia (Graduação) - Universidade Federal de Ouro Preto.
Escola de Minas. Colegiado do Curso de Engenharia de Controle
e Automação.
Área concentração: Automação industrial.
Fonte de
1. Cargas. 2. Algoritmo. 3. CLP (Controle lógico programável).
I.
Universidade
Federal de Ouro Preto. II. Título.
catalogação: [email protected]
CDU: 681.5
CDU: 628
AGRADECIMENTOS
Agradeço primeiramente a Deus pôr ter me permitido alcançar tão valoroso objetivo em
minha vida.
A minha esposa e filha que me e incentivou em todos os momentos, me dando carinho,
compreensão, e apoio. Aos meus pais e irmãos pôr desejarem a vitória de mais uma etapa em
minha vida. Obrigado!
Aos meus amigos que me apoiaram e me ajudaram no desenvolvimento deste trabalho como
elaboração do texto: Davi Silva Leite, Fabiano Tomas Novais, Fernando Santos Alves
Fernandes, Rodrigo Luis Guedes e Robson Numes Dal Col.
Ao meu orientador, Professor Dr. Paulo Marcos de Barros Monteiro, pela orientação e
oportunidade de desenvolvimento deste trabalho, e principalmente pela amizade e confiança.
Em especial agradeço aos professores pela orientação e pela amizade: Agnaldo José de Rocha
Reis, Karla Boaventura Pimenta, Luiz Fernando Ríspoli Alves e Sávio Augusto Lopes da
Silva.
RESUMO
Em sistemas de distribuição de energia elétrica é comum a prática do balanceamento de
cargas entre as fases de um circuito, a fim de melhorar suas condições de operação e aumentar
a vida útil dos equipamentos. O balanceamento de carga entre alimentadores no sistema de
distribuição corresponde a uma redistribuição de cargas entre os mesmos. Pela mudança do
estado aberto/fechado dos relés no sistema distribuição algumas cargas podem ser transferidas
de um alimentador para outro, tornando o sistema mais balanceado e reduzindo o risco de
sobrecarga. Para evitar sobrecargas, resultantes da variação de demandas, é desejável executar
o balanceamento de carga entre os alimentadores do sistema de distribuição. A reconfiguração
das redes elétricas tem como finalidade: reduzir as perdas de energia, melhorar o perfil de
tensão para os consumidores, aumentar os níveis de confiabilidade ou restabelecer o
fornecimento de energia em situações de contingência. Neste trabalho é apresentada uma
implementação do algoritmo de três fases para balanceamento de cargas no secundário do
transformador da subestação, utilizando o software Proficy Machine Edition 5.9 para
desenvolver a lógica e no supervisório Elipse Scada para monitoramento e atuação para
alocação das cargas, garantindo todas as possíveis situações reais de um sistema. Como
ferramentas computacionais utilizamos o Proteus 7 Professional para simular os circuitos
eletrônicos e a programação do PIC 16F877A para determinar a defasagem de tensão e
corrente. Na programação do CLP GE Fanux Versa Max o balanceamento é garantido pelo
conhecimento prévio da corrente de cada carga e a decisão de alocar e realocar as cargas nas
fases é tomado antecipadamente garantido um sistema balanceado e confiável.
Palavras - Chaves: Balanceamento de cargas, implementação do algoritmo das três fases
software Proficy Machine Edition 5.9, programação do CLP GE Fanux Versa Max e
simulação.
ABSTRACT
In distribution systems of electric power is the common the practice of swaying load between
circuit phases in order to improve their operation and increase the equipment’s life. The
swaying load between feeders in the distribution system corresponds to charge redistribution
between them. To change the state open / close relays in distribution system some charge may
be transferred from one feeder to another, making the system more balanced and reducing the
risk of overload. To avoid overload, resulting from the variation of demands is desirable to
execute the swaying load among the feeders of the distribution system. The reconfiguration of
the grids power is to: reduce the energy loses, improve the voltage profile for consumers,
increase the levels of reliability or restore the power supply in contingency situations. This
report presents an implementation of the algorithm in three-phase to swaying load in the
secondary transformer substation, using the software Proficy Machine Edition 5.9 for
developing logic and Elipse supervisory SCADA for monitoring and performance for
allocation of charges, ensuring all possibles situations of a real system. The computational
tools used is the Proteus 7 Professional to simulate the electronic circuits and the PIC
16F877A programation to determine the gap voltage and current. In the programming of the
GE PLC Fanux Versa Max the swaying is guaranted by knowledge of the current of each
charge and the decision to allocate and reallocate the charges is taken early ensuring a reliable
and balanced system.
Key words: swaying load, implementation of the algorithm three-phase software Proficy
Machine Edition 5.9, planning for the GE PLC Fanux Versa Max and simulation.
LISTA DE FIGURAS
Figura 1.1
Figura 2.1
Figura 2.2
Figura 2.3
Figura 2.4
Figura 2.5
Figura 2.6
Figura 4.1
Figura 5.1
Figura 5.2
Figura 5.3
Figura 5.4
Figura 5.5
Figura 6.1
Figura 6.2
Figura 6.3
Sistema Elétrico de potência............................................... 15
Diagrama Fasorial............................................................... 17
Ligação Estrela – Triângulo................................................ 18
Desequilíbrio de Tensão..................................................... 19
Tensão (V) e Corrente (I) em fase...................................... 22
Fator de Potência................................................................. 24
Componentes Simétricas..................................................... 26
Rede de Distribuição Primária............................................ 34
Detecção por Zero de Tensão.............................................. 38
Diagrama Elétrico do Circuito............................................ 40
Detecção por Zero de Tensão.............................................. 41
Detecção do Zero de Corrente............................................ 42
Defasagem de Tensão e Corrente........................................ 43
Diagrama do Circuito de Controle...................................... 45
Diagrama do Circuito de Entrada e Saída de Cargas.......... 45
Defasagem nas Três Fases.................................................. 46
Figura 6.5
Defasagem nas Três Fases.................................................. 47
Proficy Machine Main........................................................ 48
Figura 6.6
Proficy Machine Entradas de Cargas.................................. 49
Figura 6.7
Proficy Machine Verificação das Fases.............................. 50
Figura 6.8
Eclipse Scada Balanceamento de Cargas............................ 51
Figura 6.9
Figura 6.10
Circuito de Controle............................................................ 52
Supervisorio Eliplse Scada.................................................. 53
Figura 6.11
Maquete Alocação das Cargas............................................ 54
Figura 6.12
Maquete Alocação de um Banco de Cargas........................ 55
Figura 6.4
LISTA DE SÍMBOLOS
Tensão de Pico
Ângulo de Referência
Operador Fasorial que gira o vetor 120º
Freqüência angular [rd/s]
Ie
Ângulo de defasagem entre tensão fase e corrente de fase
Ve
Valor eficaz corrente alternada [A]
I
Valor eficaz da tensão da alternada [V]
V
Valor eficaz de corrente [A]
V2
Valor eficaz de Tensão [V]
V1
Componentes de seqüência negativa da tensão
P
Componentes seqüência positiva da tensão
S
Potência Ativa [w]
Q
Potência Aparente [VA]
D
Diodo
K
Potência Reativa [VAR]
LISTA DE ABREVIAÇÕES
CA
Corrente Alternada
CC
Corrente Continua
SEP
Sistemas Elétricos de Potência
FP
Fator de Potência
CLP
Controlador Lógico Programável
NEMA
National Electrical Manufactures Association
SCADA
Supervisory Control And Data Acquisition
LCD
Liquid Crystal Display
IEC
International Engineering Consortium
IEEE
Institute of Electrical and Electronic Engineer
RMS
Valor Eficaz
FD
Fator de Desequilíbrio
PRODIST
Procedimentos de Distribuição de Energia Elétrica no Sistema Elétrico
IEC
International Electronical Comission
GND
Terra
CPU
Unidade Central De Processamento
QEE
Qualidade Energia Elétrica
UFOP
Universidade Federal de Ouro Preto
SUMÁRIO
1.
INTRODUÇÃO .................................................................................................... 13
1.1.
Sistema Elétrico de Potência .................................................................................................. 14
1.2.
Objetivo................................................................................................................................... 15
1.3.
Objetivos Específicos .............................................................................................................. 16
2.
FUNDAMENTAÇÃO TEÓRICA ....................................................................... 16
2.1.
Sistema Trifásico .................................................................................................................... 16
2.2.
Principais Dispositivos Utilizados em um SEP ...................................................................... 18
2.3.
Desequilíbrio de um Sistema Elétrico .................................................................................... 19
2.4.
Fator de Potência .................................................................................................................... 21
2.5.
Componentes Simétricas ........................................................................................................ 26
2.6.
Controlador Lógico Programável .......................................................................................... 28
2.7.
Sistema de Supervisório ......................................................................................................... 29
3.
PRINCIPAIS TRABALHOS DESENVOLVIDOS ........................................... 30
4.
METODOLOGIA ................................................................................................. 31
4.1.
Parâmetro de Avaliação ......................................................................................................... 32
4.2.
Balanceamento de Cargas ...................................................................................................... 32
4.3.
Método para Balanceamento das Cargas nos Alimentadores ............................................... 34
4.3.1.
Algoritmo das Três Fases ....................................................................................................... 34
4.3.2.
FASE 1 (Alocação Inicial) ...................................................................................................... 35
4.3.3.
FASE 2 (Fase de Balanceamento) .......................................................................................... 35
4.3.4.
FASE 3 (Duplas Trocas) ......................................................................................................... 36
4.3.5.
Passos do Algoritmo das Três Fases: ..................................................................................... 36
5.
DESENVOLVIMENTO DO PROTÓTIPO....................................................... 37
5.1.
Maquete .................................................................................................................................. 37
5.2.
Sensor ...................................................................................................................................... 38
5.2.1.
Circuito Defasagem de Tensão e Corrente ............................................................................ 39
5.3.
Princípio de Funcionamento do Circuito ............................................................................... 40
5.3.1.
A detecção de Zero de Tensão ................................................................................................ 40
5.3.2.
A detecção de Zero de Corrente ............................................................................................. 41
5.3.3.
Defasagem de Corrente e Tensão ........................................................................................... 43
6.
RESULTADOS ..................................................................................................... 44
6.1.
Simulação com Ferramentas Computacionais ...................................................................... 44
6.2.
Circuito ................................................................................................................................... 51
6.3.
Teste na Maquete .................................................................................................................... 52
7.
CONCLUSÃO ....................................................................................................... 56
8.
SUGESTÕES DE TRABALHOS FUTUROS .................................................... 57
13
1. INTRODUÇÃO
Os elevados custos envolvidos na construção de sistemas elétricos de potência, linhas de
transmissão e redes de distribuição, determinam cada vez mais que os diferentes segmentos da
indústria de energia elétrica utilizem a energia disponível da maneira mais eficiente possível.
Minimizar as perdas de um sistema de distribuição representa não só dispor de uma parcela
maior da energia, mas também de melhorar a qualidade do produto oferecido aos clientes.
Classificando como um distúrbio ligado à qualidade da energia elétrica, os desequilíbrios de
fases, podem ter como origem a distribuição inadequada de cargas dentro de um sistema de
alimentação, tendo como conseqüência o aparecimento de tensões de seqüência negativa,
geração de componentes harmônicas na rede e outros problemas associados a uma
alimentação de um sistema desequilibrado.
O sistema secundário de distribuição possui um carregamento assimétrico das três fases, visto
que é formado basicamente por cargas monofásicas que não estão distribuídas
uniformemente. Existe ainda uma demanda de carga variável no tempo que, em alguns
momentos, contribui para que a diferença da carga entre as três fases seja ainda mais
acentuada.
Esse carregamento assimétrico provoca desequilíbrio na corrente que circula pela rede elétrica
e conseqüentemente o desbalanceamento na tensão da rede, propagando o problema para
outros consumidores, especialmente trifásicos, ligados a partir do mesmo circuito primário.
O desequilíbrio de fases em um sistema elétrico, seja ele monofásico bifásico ou trifásico
causa diversos problemas e transtornos ás redes elétricas, pode-se apontar:
O desequilíbrio de fases influi na variação da rotação nominal e aumento da temperatura dos
motores elétricos, tendo uma consequências à redução do rendimento e aumento nos gastos
com o consumo de energia elétrica, um desbalanceamento da ordem de 2,4% entre as tensões
pode ocasionar na perda dos motores elétricos de aproximadamente 10% diminuindo tanto no
seu rendimento quando na vida útil. (CAMPANA, 2007).
14
Nos dias atuais onde se tem cada vez mais à preocupação com o consumo de energia, a
criação de novos métodos e desenvolvimento de equipamentos tornou essencial para que
venham possibilitar uma melhoria na gestão energética, principalmente na indústria, que é
área mais afetada.
O motor elétrico é o equipamento bastante afetado pelo desbalanceamento de tensões, como
ele representa cerca de 50% do consumo de energia na indústria, a utilização de métodos e
equipamentos que tendem a minimizar este problema é essencial.
Outros efeitos negativos do desequilíbrio da carga são: saturação do transformador,
desequilíbrio das suas tensões secundárias e aumento das perdas devido à circulação de
corrente de neutro.
Em ponte retificadora existe um efeito indesejável do desequilíbrio de corrente. Uma ponte
retificadora CA/CC, controlada ou não, injeta na rede sob condições nominais, correntes
harmônicas características de ordem 3, 5, 7, 11, 13, etc. Entretanto, quando o sistema
encontra-se desequilibrado, os retificadores passam a gerar além das correntes harmônicas
características, o terceiro harmônico e seus múltiplos.
1.1.
Sistema Elétrico de Potência
Sistemas Elétricos de Potência (SEP) têm como função principal fornecer energia elétrica de
qualidade aos usuários, na capacidade solicitada a cada instante. Três etapas fundamentais
compõem um sistema de energia elétrica: Geração, Transmissão e Distribuição.
Segundo MONTICELLI e GARCIA, (1999) sistema de geração se encarrega de transformar
energia hidráulica, térmica, nuclear, eólica, entre outras, em energia elétrica. No Brasil,
devido ao grande potencial hídrico existente, predominância no modo hidroelétrico. Para que
esta energia gerada seja transportada, a tensão deve ser elevada para a tensão de transmissão.
Ainda seguindo MONTICELLI e GARCIA, (1999) o sistema de transmissão e
subtransmissão transportam a energia demandada em altos níveis de tensão, que são
estabelecidos pela distância a ser percorrida e pela quantidade de energia a ser transportada. A
15
energia transportada na tensão de transmissão é fornecida para alguns consumidores e
reduzida para tensão de subtransmissão. Neste nível, a energia é fornecida para consumidores
e também rebaixada para os padrões do sistema de distribuição conforme pode ser observado
na figura 1.1.
Figura 1.1: Sistema Elétrico de potência.
Fonte: Monticelli e Garcia.
1.2.
Objetivo
Este trabalho faz parte de um trabalho mais amplo envolvendo o desenvolvimento de um
sistema supervisório para correção do fator de potência e balanceamento de cargas de um
sistema trifásico realizado simultaneamente pelos alunos Davi Leite, Rodrigo Guedes e
Robson Lage Figueiredo, todos do curso de engenharia de controle e automação da Escola de
Minas de Ouro Preto.
A proposta desse trabalho é realizar uma análise sobre o problema de desbalanceamento de
cargas no secundário do transformador, através de simulação e implementação de sistema de
monitoramento e compensação no desequilíbrio nos alimentadores, utilizando um Controlador
Lógico Programável (CLP GE Fanuc Versa Max) de forma que se apresentem correntes
equilibradas à rede primária de distribuição.
16
1.3.
Objetivos Específicos
Pretendemos implementar o algoritmo de três fases para balanceamento de cargas nos
secundário do transformador da subestação, utilizando o software Proficy Machine para
desenvolver a lógica do algoritmo para balanceamento das cargas e no supervisório Elipse
Scada para monitoramento e atuação para alocação das cargas garantindo todas as possíveis
situações reais de um sistema.
2. FUNDAMENTAÇÃO TEÓRICA
Neste tópico tem como objetivo apresentar alguns dos conceitos necessários para
compreensão do presente trabalho.
Estes conceitos serão aqui tratados de uma forma superficial com uma breve introdução, e nos
capítulos seguintes os itens mais importantes serão tratados com maior detalhamento.
2.1.
Sistema Trifásico
A maior parte da geração, transmissão e utilização em alta potência da energia elétrica
envolve sistemas polifásicos, ou seja, sistemas nos quais são disponíveis diversas fontes de
mesma amplitude com uma diferença de fase entre elas.
O sistema trifásico possui vantagens econômicas, operacionais e uma maior flexibilidade de
poder atender cargas monofásicas, bifásicas e trifásicas sem qualquer alteração em sua
configuração permitindo uma transmissão de potência de forma mais econômica. Em sistemas
trifásicos o módulo do campo girante total é constante, o que não ocorre em outros sistemas
polifásicos (todos os sistemas polifásicos com n × 3 fases apresentam esta característica, mas
com n>1 estes sistemas não são interessantes economicamente) e sua
potência p(t) é
constante, já que no monofásico é pulsante. Esta forma o sistema trifásico é mais difundida na
de geração, transmissão e distribuição de energia elétrica em corrente alternada.
Este sistema incorpora o uso de três ondas senoidais com o valor
e defasadas em 120º
graus entre si e podemos expressá-la matematicamente da seguinte forma:
17
(2.1)
(2.2)
(2.3)
Onde:
=Tensão de Pico
=Velocidade Angular
=Ângulo de Referência
Podemos demonstrar com a figura 2.1 o diagrama fasorial, portanto definimos que um sistema
trifásico equilibrado é aquele em que a resultante da soma das tensões é igual a ZERO ou que
seus vetores estejam defasados em 120 graus entre si.
Figura 2.1 – Diagrama Fasorial.
Fonte: Schweitzer Engineering Laboratories.
As máquinas elétricas trifásicas tendem a ser mais eficientes pela utilização plena dos
circuitos magnéticos. As linhas de transmissão permitem a ausência do neutro, e o
acoplamento entre as fases reduz significantemente os campos eletromagnéticos.
As cargas trifásicas podem ser interligadas ao sistema de dois modos distintos:
18
Estrela: um dos terminais das cargas é conectado a uma das fases do sistema
enquanto o outro terminal é conectado a um ponto comum que é o neutro
utilizado para se medir as tensões de fase, conforme a figura 2.2.
Triângulo, também chamado de delta: nesta configuração um dos terminais das
cargas é conectado a outro terminal de outra carga e as fases do sistema são
interligadas nos pontos de junção dos terminais da carga, como pode ser
observado na figura 2.2.
Figura 2.2 – Ligação Estrela – Triângulo.
Fonte: Schweitzer Engineering Laboratories.
2.2.
Principais Dispositivos Utilizados em um SEP
Um SEP típico é formado por várias estações geradoras conectadas através de linhas de
transmissão a grandes centros de carga, onde a potência é distribuída aos consumidores pelo
sistema de distribuição, formado por linhas de distribuição e transformadores.
Geradores: são responsáveis pela geração de energia em corrente alternada no sistema
elétrico e suprem a energia solicitada pelas cargas em um SEP, mantendo os níveis de
tensão dentro de uma faixa estreita, e garantindo a continuidade e a estabilidade do
sistema.
Transformadores: possibilitam a conexão de vários equipamentos elétricos com
tensões elétricas distintas, podendo ser abaixador ou elevador de tensão. Em um SEP
ele é responsável pela elevação do nível de tensão para transmissão de energia elétrica.
19
Linhas de Transmissão: são os elementos do sistema elétrico que transportam toda a
energia elétrica gerada até o consumidor. Dependendo do local da geração e do
consumo, elas podem ter comprimentos variados.
Disjuntores: dispositivos eletromecânicos de manobra, ou seja, ele pode abrir ou
fechar parte do sistema elétrico. Tem função de proteção na instalação, proteção
contra curto circuito ou sobre carga.
Relés: são os elementos lógicos do sistema de proteção. Normalmente respondem a
tensões e correntes e provem a abertura ou não dos disjuntores a ele associado.
2.3.
Desequilíbrio de um Sistema Elétrico
Segundo MCEACHERN (2004), o desequilíbrio ou assimetria é uma situação decorrente da
forma de utilização do sistema elétrico, em que as tensões ou correntes apresentam amplitudes
desiguais entre si, ou seja, é uma condição na qual as três fases apresentam diferentes valores
de tensão em módulo ou defasagem angular entre fases diferentes de 120º elétricos ou ainda
as duas condições simultaneamente, como ilustra a figura abaixo.
Figura 2.3 – Desequilíbrio de Tensão.
Fonte: Qualidade de Energia, Alex McEACHERN.
20
O indicador para avaliar o desequilíbrio de tensão é o Fator de Desequilíbrio de Tensão (K),
que exprime a relação entre as componentes de seqüência negativa (V2) e seqüência positiva
(V1) da tensão, expresso em termos percentuais da componente de seqüência positiva,
conforme a expressão abaixo.
(2.4)
(2.5)
(2.6)
(2.7)
Onde temos na equação acima:
: é igual o vetor seqüência zero
: é igual o vetor seqüência positivo
: é igual o vetor seqüência negativa
: é igual um operador que gira o vetor 120º
A principal causa de desbalanceamentos é distribuição não uniforme de cargas monofásicas.
Outras causas são, por exemplo, contatos e conexões oxidados, transformadores com
impedâncias desiguais entre fases, dentre outras.
As descargas atmosféricas em linhas de transmissão e/ou distribuição constituem a principal
causa de desbalanceamentos não permanentes, uma vez que levam a dips e swells de forma
desigual entre as fases.
Em um sistema elétrico trifásico ideal, as tensões ou correntes estão equilibradas, as três
tensões estão exatamente 120º defasadas. No mundo real, tensões e correntes não estão
perfeitamente equilibradas. A amplitude em cada fase será diferente e o ângulo não poderá ser
de 120º.
21
Outra maneira de entender os efeitos desta situação de desequilíbrio de tensão ou corrente é
pensar nela como a soma de três conjuntos de vetores equilibrados: um conjunto, chamado de
sequência positiva, que gira na direção correta; um conjunto de sequência negativa, que tem a
ordem das fases invertidas, em outras palavras parece girar ao contrário, e um conjunto
chamado de sequência zero, que não tem nenhum ângulo entre as fases.
Isto ajuda em entender porque tensões e correntes desequilibradas fazem transformadores e
motores sobreaquecer, pois parte da tensão ou corrente tenta girar o motor ou transformador
no sentido inverso.
Recomendação da norma IEC 1000-2-2 é que indica um nível aceitável para o fator de
desequilíbrio em sistemas de baixa tensão é de 2 %. A norma EN50160 estabelece que, sob
condições normais de suprimento, durante o período de uma semana, 95% dos valores RMS
da componente de seqüência negativa, devem estar na faixa de 0 a 2% da componente de
seqüência positiva. Tais valores RMS consistem da média dos pontos medidos durante dez
(10) minutos consecutivos. Em algumas áreas, onde partes dos consumidores são monofásicos
ou bifásicos, podem-se admitir desequilíbrios de até 3%.
2.4.
Fator de Potência
O fator de potência (FP), como demonstra a figura 2.5 de um sistema elétrico qualquer, que
está operando em corrente alternada (CA), é definido pela razão da potência real ou potência
ativa pela potência total ou potência aparente.
22
Figura 2.4. – Tensão (V) e Corrente (I) em fase
Em circuitos de corrente alternada (CA) puramente resistivos, as ondas de tensão e de
corrente elétrica estão em fase, ou seja, mudando a sua polaridade no mesmo instante em cada
ciclo como pode ser observado na figura 2.4. Quando cargas reativas estão presentes, tais
como capacitores ou condensadores e indutores, o armazenamento de energia nessas cargas
resulta em uma diferença de fase entre as ondas de tensão e corrente. Uma vez que essa
energia armazenada retorna para a fonte e não produz trabalho útil, um circuito com baixo
fator de potência terá correntes elétricas maiores para realizar o mesmo trabalho do que um
circuito com alto fator de potência.
A potência ativa é a capacidade do circuito em produzir trabalho em um determinado período
de tempo. Devido aos elementos reativos da carga, a potência aparente, que é o produto da
tensão pela corrente do circuito, será igual ou maior do que a potência ativa.
No caso da corrente alternada (CA) senoidal, a média de potência elétrica desenvolvida por
um dispositivo de dois terminais pode ser determinada pela resolução da integral anterior, de
onde resulta o produto dos valores quadrados médios (ou RMS, em inglês) ou eficazes da
23
diferença de potencial entre os terminais e da corrente que passa através do dispositivo com o
cosseno do seu ângulo de defasagem.
(2.9)
Onde Ie é o valor eficaz da intensidade de corrente alternada senoidal, Ve é o valor eficaz da
tensão senoidal e
é o ângulo de fase ou defasagem entre a tensão e a corrente. O termo
cos é denominado Fator de potência. Ie está em ampères e Ve em volts, P estará em watts.
A energia transferida num determinado intervalo de tempo corresponde ao integral temporal
da potência ativa. É esta a integração realizada pelos contadores de energia utilizados na
faturação de consumos energéticos de instalações.
Potência Aparente não se inclui o termo cosφ que haveria que contemplar, devido ao fato de
que a corrente e a tensão estejam defasados entre si, obtemos o valor do que se denomina
potência aparente ou teórica S que se expressa em volt ampères (VA):
(2.10)
No qual
entende-se como o conjugado do número complexo Ie.
É com base no valor desta potência (ou das correntes respectivas) que se faz o
dimensionamento de sistemas de proteção das instalações elétricas. Na contratação de
fornecimento de energia elétrica é normalmente especificada a taxa de potência que depende
da potência aparente máxima a ser disponibilizada pelo fornecedor.
A potência reativa é a medida da energia armazenada que é devolvida para a fonte durante
cada ciclo de corrente alternada. Existe também em CA outra potência, que é a chamada
potência reativa Q cuja unidade é (var) e é igual a:
(2.11)
Numa instalação que apenas possua potência reativa, a potência média tem um valor nulo,
pelo que não é produzido nenhum trabalho útil. Diz-se, portanto que a potência reativa é uma
24
potência devatada (não produz watts ativos). Na indústria elétrica se recomenda que todas as
instalações tenham um fator de potência (cos ) máximo, com o qual sen
será mínimo e,
portanto a potência reativa ou não útil será também mínima.
A integração temporal da potência reativa resulta numa energia reativa, que representa a
energia que circula de forma oscilante nas instalações, mas não é consumida por nenhum
receptor. Em casos de consumidores especiais de energia elétrica (grandes consumidores),
esta energia pode ser contabilizada em var-hora, e faturada adicionalmente à energia ativa
consumida.
O fluxo de potência em circuitos de corrente alternada tem três componentes: potência ativa
(P), medida em watts (W); potência aparente (S), medida em volt-ampéres (VA); e potência
reativa (Q), medida em volt-ampére-reativo (VAr).
O fator de potência FP pode ser expresso como:
(2.12)
No caso de formas de onda perfeitamente senoidais, P, Q e S podem ser representados por
vetores que formam um triângulo retângulo, também conhecido como triângulo de potências,
sendo que:
Figura 2.5 – Fator de Potência
Fonte: Qualidade de Energia, Alex McEACHERN
Triângulo retângulo que representa a relação entre as potências aparente (S), ativa (P) e
reativa (Q)
(2.13)
25
Por definição, o fator de potência é um número adimensional entre 0 e 1. Quando o fator de
potência é igual a zero (0), o fluxo de energia é inteiramente reativo, e a energia armazenada é
devolvida totalmente à fonte em cada ciclo. Quando o fator de potência é 1, toda a energia
fornecida pela fonte é consumida pela carga. Normalmente o fator de potência é assinalado
como atrasado ou adiantado para identificar o sinal do ângulo de fase entre as ondas de
corrente e tensão elétricas.
Se uma carga puramente resistiva é conectada ao sistema, a corrente e a tensão mudarão de
polaridade em fase, nesse caso o fator de potência será unitário (1), e a energia elétrica flui
numa mesma direção através do sistema em cada ciclo. Cargas indutivas tais como motores e
transformadores (equipamentos com bobinas) produzem potência reativa com a onda de
corrente atrasada em relação à tensão. Cargas capacitivas tais como bancos de capacitores ou
cabos elétricos enterrados produzem potência reativa com corrente adiantada em relação à
tensão. Ambos os tipos de carga absorverão energia durante parte do ciclo de corrente
alternada, apenas para devolver essa energia novamente para a fonte durante o resto do ciclo.
Frequentemente é possível corrigir o fator de potência para um valor próximo ao unitário.
Essa prática é conhecida como correção do fator de potência e é conseguida mediante o
acoplamento de bancos de indutores ou capacitores, com uma potência reativa Q contrário ao
da carga, tentando ao máximo anular essa componente. Por exemplo, o efeito indutivo de
motores pode ser anulado com a conexão em paralelo de um capacitor (ou banco) junto ao
equipamento.
As perdas de energia aumentam com o aumento da corrente elétrica transmitida. Quando a
carga tem fator de potência menor do que 1, mais corrente é requerida para suprir a mesma
quantidade de potência útil. As concessionárias de energia estabelecem que os consumidores,
especialmente os que possuem cargas maiores, mantenham os fatores de potência de suas
instalações elétricas dentro de um limite mínimo, caso contrário serão penalizados com
cobranças adicionais. Engenheiros freqüentemente analisam o fator de potência de uma carga
como um dos indicadores que afetam a eficiência da transmissão e geração de energia elétrica.
26
2.5.
Componentes Simétricas
Um sistema trifásico desequilibrado pode ser decomposto em três sistemas equilibrados. Para
isso é utilizada a transformação em componentes simétricas, obtendo três seqüências:
positiva, negativa e zero. Essa transformação pode ser aplicada tanto para tensões quanto para
correntes.
A figura 3.1 esquematiza as três sequência para as correntes de um sistema trifásico
desequilibrado.
Figura 2.6 – Componentes Simétricas
Fonte: Schweitzer Engineering Laboratories
Na sequência positiva os fasores apresentam o mesmo módulo, estão defasados de 120º entre
si e se sucedem na seqüência abc, com velocidade angular ω.
Na seqüência negativa os fasores apresentam o mesmo módulo, estão defasados de 120º entre
si e se sucedem na sequência acb, com velocidade angular ω.
Na seqüência zero os fasores são iguais em módulo e ângulo nas fases a, b e c.
As componentes simétricas são definidas matematicamente como:
(2.14
27
(2.15)
Definimos o operador α,um número complexo de módulo unitário e argumento 120° , de
modo que, quando aplicado a um fasor qualquer, transforma-o em outro de mesmo 120°. Em
outras palavras,
=
(2.16)
A potenciação do operador α possui as seguintes propriedades:
(2.17)
(2.18)
De forma similar, os valores de fase das correntes, em termos das componentes simétricas,
são dados matematicamente por:
(2.19)
(2.20)
(2.21)
Os sistemas equilibrados possuem apenas a componente simétrica de seqüência positiva. Os
desequilíbrios são expressos pelas componentes de seqüências negativa e zero, estando a
seqüência zero presente apenas nos sistemas trifásicos a quatro fios, em que a soma das
correntes Ia, Ib e Ic pode ser diferente de zero.
O fator de desequilíbrio de um sistema, como definido no PRODIST, é caracterizado
percentualmente pela relação entre a componente de seqüência negativa e a componente de
seqüência positiva.
(2.22)
28
2.6.
Controlador Lógico Programável
Controlador Lógico Programável, ou CLP (Programmble Logic Controller) é definido por
Georgini (2006, p 48, traduzido) como um dispositivo de estado sólido – um Computador
Industrial, capaz de armazenar instruções para implementação de funções de controle
(seqüência lógica, temporização e contagem, por exemplo), alem de realizar lógicas e
aritméticas, manipulação de dados e comunicação em rede, sendo utilizado no controle de
sistemas automatizados.
Aparelho eletrônico digital que utiliza uma memória programável para armazenar internamente
instruções e para implementar funções específicas, tais como lógica, sequenciamento,
temporização, contagem e aritmética, controlando, por meio de módulos de entradas e saídas,
vários tipos de máquinas ou processos. (NEMA, 2009)
Para a programação dos CLP’s sentiu-se a necessidade da construção de um padrão que fosse
seguido pelos fabricantes. Isto teve inicio em 1979 o IEC (International Electronical
Comission) iniciou seus trabalhos com este propósito e como resultado temos hoje a IEC
61131 onde se encontra com 8 partes sendo que algumas ainda não finalizadas.
29
2.7.
Sistema de Supervisório
Segundo Viana (2008) o termo SCADA (Supervisory Control And Data Acquisition) na
automação refere-se a sistemas de supervisão, controle e aquisição de dados composto por um
ou mais computadores monitorando e controlando um processo.
O processo pode ser industrial, infra-estrutura ou facilidade conforme descrito a seguir:
Processos industriais incluem manufatura, geração de energia, refino de petróleo e muitos
outros. Podem ser executados de forma contínua ou descontinua. Os sinais tratados podem ser
tanto analógicos quanto digitais.
Processos de infra-estrutura podem ser públicos ou privados, e incluem tratamento e
distribuição de água, coleta e tratamento de esgoto, linhas de óleo e gás, transmissão e
distribuição de energia elétrica, e grandes sistemas de comunicação.
O objetivo principal dos sistemas SCADA é propiciar uma interface de alto nível do operador
com o processo informando-o "em tempo real" de todos os eventos de importância da planta.
30
3. PRINCIPAIS TRABALHOS DESENVOLVIDOS
Na década de 80, foram desenvolvidos trabalhos propondo técnicas para a resolução do
problema de balanceamento de carga através de operações de chaveamento (troca de ramos).
Nos primeiros trabalhos, o balanceamento de carga foi formulado como um problema de
programação inteira ( Aoki , 1988) e como problema de otimização não-linear ( Baran e Wu,
1989).
Na década seguinte, o problema de balanceamento foi tratado como um problema de
otimização multiobjetivo abordando metaheurísticas ( Chiang e Jean-Jumeau, 1990). Ainda
nesta década, houve trabalhos que empregaram técnicas heurísticas ( Hsu 1993; Jwo-Hwu,
1997) e mais recentemente o problema foi abordado com um método gráfico, distance
measurement technique .
Aoki (1988) propõem um algoritmo para o problema de balanceamento de carga nos
transformadores das subestações e nos alimentadores, visando a minimização de perdas tanto
em estado normal de operação como em estados de falhas ou saídas programadas. O método
procura chegar a soluções aproximadas e práticas para o sistema. O algoritmo aplica uma base
de regras para manter a característica radial do sistema e para evitar repetições nas operações
de chaveamento. Através de índices de balanceamento de carga para cada transformador e
alimentador, operações de chaveamento (troca de ramos) são executadas entre dois
alimentadores, com o maior e menor índice, e é repetido entre os outros alimentadores até que
as cargas sejam o mais equalizado possível. Os autores comentam a dificuldade de se obter
uma solução ótima, em função da dimensão do sistema e não explicam se o método é eficiente
para aplicação em tempo real.
31
4. METODOLOGIA
Pretendemos aplicar o método para balanceamento de cargas baseado no algoritmo de Três
Fases no secundário do transformador, objetivando o chaveamento para as trocas dos
alimentadores visando minimizar o desbalanceamento das fases garantindo um sistema
equilibrado.
Como ferramentas computacionais utilizamos o Proteus 7 Professional para simular os
circuitos eletrônicos e a programação do PIC 16F877A. No software Proficy Machine Edition
5.9 foi desenvolvido a lógica do algoritmo para balanceamento das cargas e no supervisório
Elipse Scada para monitoramento e atuação para alocação das cargas garantindo todas as
possíveis situações reais de um sistema.
Optamos na construção de uma maquete que utilizamos os seguintes componentes:
• Conjunto de Born;
• PIC 16F877A para cálculo da defasagem de tensão em relação à corrente;
• CLP GE Fanuc Versa Max;
• Disjuntores;
• Liquid Crystal Display (LCD) para mostra os resultados no display;
• Oito Push Botões com retenção;
• Quatros Lâmpadas como Cargas Resistivas;
• Relés;
• Sensor com as seguintes características:
Detecção de tensão por zero;
Detector de corrente por zero;
• supervisório Elipse Scada;
• Transformador;
• Três Ventiladores como Cargas Indutivas.
A implementação de um supervisório Elipse Scada baseado no Controlador Lógico
Programável (CLP GE Fanuc Versa Max) para o monitoramento e atuação no período de
32
desbalanceamento de cargas nas linhas de alimentação possibilitando a correção
automaticamente dos valores de corrente entre as fases.
4.1.
Parâmetro de Avaliação
Como parâmetro de avaliação foi construído uma maquete para confrontar os resultados
obtidos nos software de simulação com os resultados da implementação do sistema prático.
4.2.
Balanceamento de Cargas
O balanceamento de carga entre alimentadores no sistema de distribuição corresponde a uma
redistribuição de cargas entre os mesmos.
Pela mudança do estado aberto/fechado dos relés no sistema distribuição, algumas cargas
podem ser transferidas de um alimentador para outro, tornando o sistema mais balanceado e
reduzindo o risco de sobrecarga. Para evitar sobrecargas, resultante da variação de demandas,
é desejável executar o balanceamento de carga entre os alimentadores do sistema de
distribuição. Em condições normais de operação, o balanceamento de carga entre os
alimentadores é obtido através da reconfiguração da rede, que redistribui as cargas entre os
alimentadores. Com cargas mais balanceadas, o risco de sobrecarga pode ser reduzido (Hsu et
al., 1993).
Operações de chaveamento nos alimentadores da rede de distribuição são executadas em
situações anormais, como sobrecargas, desbalanceamento, desligamentos inesperados e
durante a manutenção ou expansão do sistema, onde equipamentos devem ser desligados por
um período. Estas situações podem causar desenergizações no sistema de distribuição, e as
áreas desenergizadas devem ser isoladas e a restauração do serviço deve ser executada.
Nos algoritmos propostos para resolver o problema de reconfiguração de rede para
transferência de cargas objetiva-se o balanceamento de carga, considerando restrições de
limites de capacidade dos transformadores/alimentadores das subestações, limites do fluxo
nas linhas, limites na queda de tensão nas barras de carga e radialidade da rede.
33
Propõem o método do algoritmo das Três Fases de alocação e troca de ramos que é
provavelmente a alternativa mais utilizada para reduzir perdas em sistema de distribuição. O
procedimento tem início com uma configuração inicial. Para cada chave aberta, onde haja
uma diferença de tensões entre seus terminais, é identificado o ramo que se formará na rede se
essa chave for fechada.
Percorrendo esse ramo, a partir do terminal de maior diferença de potencial, procura-se uma
chave que, quando aberta, proporcione a maior redução de perdas (em relação à configuração
atual). Se existir tal chave, é realizado o fechamento da primeira e a abertura da segunda (a
troca de ramos). As perdas resistivas são reduzidas sem se perder a estrutura do sistema. As
configurações são modificadas por trocas de ramos até que não seja mais possível melhorar a
solução (ou que os ganhos sejam insignificantes). Desta forma, consegue-se eliminar um
grande número de operações indesejáveis, diminuindo o esforço computacional.
Um método para o problema de balanceamento de carga nos transformadores das subestações
e nos alimentadores é algoritmo visando à minimização de perdas tanto em estado normal de
operação como em estados de falhas ou saídas programadas. O método procura chegar a
soluções aproximadas e práticas para o sistema. O algoritmo das Três Fases aplica uma base
de regras para manter a característica do sistema e para evitar repetições nas operações de
chaveamento. Através de índices de balanceamento de carga para cada transformador e
alimentador, operações de chaveamento (troca de alimentadores) são executadas entre dois
alimentadores, com o maior e menor índice, e é repetido entre os outros alimentadores até que
as cargas sejam o mais equalizado possível, demonstrado na figura 3.1.
34
Figura 4.1 Rede de Distribuição Primária.
Fonte: Kuwabara, 2008.
4.3.
Método para Balanceamento das Cargas nos Alimentadores
Baseamos no algoritmo das Três Fases para a implementação da lógica de verificação,
alocação e troca das cargas nos alimentadores do sistema trifásico. No software Proficy
Machine Edition 6.0 desenvolvemos na lógica Ladder, baseada em símbolos semelhantes aos
encontrados nos esquemas elétricos de contatos e bobinas para verificação e alocação das
cargas nos alimentadores.
4.3.1. Algoritmo das Três Fases
O algoritmo 3-FASES pode ser resumido do seguinte modo. Na FASE 1, as alocações das
cargas são classificadas de acordo com as potencia pré definidas e alocadas as fases de
maneira a obter um carregamento razoavelmente balanceado entre eles.
Na FASE 2, a divisão de carga é melhorada, movendo-se, sucessivamente, uma carga em uma
fase mais carregado para outra fase menos carregado usando o valor de um limitante pré
calculado como alvo. Por fim, na FASE 3, tenta-se um balanço de cargas ainda melhor, por
meio da troca simultânea de duas tarefas pertencentes a fases diferentes. O detalhamento do
algoritmo 3-FASES (MULLER, 1993, p.28-43) será feito a seguir.
35
4.3.2. FASE 1 (Alocação Inicial)
Esta fase pode ser vista como um procedimento construtivo, com a característica de não
necessitar uma pré-ordenação das alocações, geralmente requerida na maioria dos algoritmos
construtivos conhecidos. A única exigência é que se conheça a potência mínima, limitante
inferior da carga e a potência máxima, limitante superior da carga para alocação das cargas
em umas das três fases.
4.3.3. FASE 2 (Fase de Balanceamento)
Esta fase pode ser vista como um procedimento de melhoramento, pois, a partir da solução
encontrada pela FASE 1, ela procura diminuir as alocações de cargas, chaveando a fase mais
carregado para a fase o menos carregado, até que não existam mais chaveamento que atinjam
este objetivo.
A escolha das fases a serem chaveado é orientada pela potência média das cargas já alocadas,
definido como,
que independe de qual fase a carga foi alocada.
Onde:
: Potência Média das Cargas,
: Potência da Carga,
m: Número de fases.
O valor de
indicará previamente qual fase esta menos sobrecarregada, ou seja, com menos
potência alocada para decidir em qual fase será realocada a próxima carga e realizando a
busca nos alimentadores para chaveamento das fases.
Temos como objetivo da FASE 2 equalizar as potência de cargas nos alimentadores através
de trocas simples. Aproximando-se as potências de cada fase o mais próximo possível do
(Potência Média das Cargas), mantemos o sistema balanceado.
36
4.3.4. FASE 3 (Duplas Trocas)
De modo a incorporar novas soluções ao espaço de busca, desenvolveu-se outra
fase, que também pode ser vista como um algoritmo de melhoramento. Esta fase busca
realizar duplas trocas, envolvendo uma alocação no alimentador mais carregado e uma de
outro alimentador. Esta fase é um pouco mais elaborada, pois além de envolver duas tarefas,
procura o melhor chaveamento dentre todos os possíveis, aproveitando a estrutura de
realocação dos alimentadores para reduzir as possíveis combinações a pesquisar.
4.3.5. Passos do Algoritmo das Três Fases:
Passo 1 – Identifique as fases mais e menos carregadas e chame os de FA, FB e FC,
respectivamente.
Passo 2 – Calcular a corrente média em cada fase e o grau de desbalanceamento em cada
fase medido em porcentagem
Passo 3 – Verificar cada fase possui menor módulo de corrente e alocar as cargas na
respectiva fase menos carregada.
Passo 4 – Verificar as entradas de novas cargas nas fases, aguardando solicitação do
comando para que a carga possa ser alocada efetivamente
Passo 5 – Programar as saídas das cargas na sua respectiva fase, através de solicitação do
comando para que possa ser desligada efetivamente.
Passo 6 – Programar as realocações das cargas nas fases menos carregadas para obter um
sistema balanceado.
37
5. DESENVOLVIMENTO DO PROTÓTIPO
Optamos na construção de uma maquete para desenvolvimento do protótipo do sistema de
controle balanceamento de carga e correção do fator de potência para uma subestação. Onde
foram realizadas todas possíveis as simulações de desbalanceamento de cargas nas fases e
correção de fator de potência, possibilitando uma simulação real da subestação.
5.1.
Maquete
Devido aos altos custos envolvidos a aquisição de equipamentos de alta e media potência,
optou-se na construção de uma maquete de baixa tensão (12 v) conforme a figura 6.1.
Na construção da maquete foram utilizados os seguintes equipamentos:
• Transformador com as seguintes características:
Monofásicos;
Corrente máxima: 400 mA;
Freqüência 60 Hz;
• Oito Push Botões com retenção;
• Conjunto de Born;
• Disjuntores;
• Liquid Crystal Display (LCD);
• CLP GE Fanuc Versa Max;
• Quatros Lâmpadas como Cargas Resistivas;
• Relés;
• supervisório Elipse Scada;
• Três bancos de capacitores, que serão inseridos em paralelo com as cargas indutivas como
forma de correção do fator de potência;
• Três Ventiladores como Cargas Indutivas;
• Sensor com as seguintes características:
Detecção de tensão por zero;
Detector de corrente por zero;
• Prancha de madeira, usada como suporte para o painel.
38
Figura 5.1 – Detecção por Zero de Tensão.
5.2.
Sensor
Para a detecção do grau de desbalanceamento entre as fases e o controle do fator de potência
foi desenvolvido um sensor para medir a defasagem entre tensão e corrente na fase.
Depois de várias tentativas mal sucedidas com o circuito eletrônico, devido ao não
sincronismo do sinal, tivemos sucesso na escolha da opção de um sensor utilizado o micro
controlador PIC 16F877A, pois se mostrou mais eficiente para a resolução do problema
apresentado.
Segundo Pereira (2002) o micro controlador PIC 16F877A os estados das portas é acessado
diretamente em duas posições distintas da memória. Quando um pino dessas portas é
configurado como entrada, ao ler o seu bit relacionado, encontra-se diretamente o nível lógico
aplicado a esse pino. Da mesma maneira, configurando um pino como saída, pode-se alterar o
seu estado, escrevendo diretamente no bit relacionado.
39
O módulo capture TIMER1 é utilizado para medir o tempo entre dois eventos ocorridos no
específico. Esses eventos são, na verdade, transições positivas (bordas de subida) ou
transições negativas (bordas de descidas) ocorridas nesse pino, dependendo da configuração
adotada para o modo de Capture.
5.2.1. Circuito Defasagem de Tensão e Corrente
Conforme a figura 5.1, a alimentação do circuito estamos utilizando um transformador de 12
v, cuja função é baixar a tensão da rede de distribuição de 127 v alternada com uma
freqüência de 60 Hz, para uma tensão alternada de 12 v na alimentação do circuito de baixa
potência.
Usamos um amplificador operacional, LM324 na função de comparador com alimentação
simétrica (5 v). Ele faz a comparação do sinal de entrada com o “GND”, e a cada passagem
por zero temos a saída alternando entre +5 v e -5 v.
Para verificar a defasagem entre tensão e corrente na fase, usou-se o critério da captura do
tempo entre os instantes da passagem por zero de tensão e a passagem por zero de corrente.
40
Figura 5.2 – Diagrama Elétrico do Circuito.
5.3.
Princípio de Funcionamento do Circuito
Conforme o diagrama elétrico mostrado na figura 5.2 é a representação do funcionamento do
sensor para as três fases.
5.3.1. A detecção de Zero de Tensão
Conforme a figura 5.2, o sinal de tensão medido no secundário do transformador, passando
por dois diodos ligados em paralelo com polaridade invertida (D3 e D4). Estes diodos têm a
função de limitar o valor de tensão entre +0,7 V e – 0,7 V para entrada no pino 3 da porta não
inversora do LM324 (comparador). A porta inversora do LM324 (pino 2) foi ligada ao GND,
não havendo assim inversão do na porta de saída (pino 1).
O diodo D5, ligado a porta de saída do LM324, tem a função de alimentar o pino1 do
HFE4081 ( Porta lógica AND) apenas com a parte positiva deste sinal, ou seja, eliminando a
parte negativa.
41
Figura 5.3 – Detecção por Zero de Tensão.
No software do Proteus 7 Professional, podemos observar o sistema de detecção de passagem
por zero da tensão. Foram realizadas as simulações e obtidos os resultados conforme a figura
5.3, em amarelo representa o sinal de entrada da rede de alimentação e em azul o sinal medido
no catodo do diodo D5.
Desta forma quando o sinal de tensão passa do semicírculo negativo para o positivo, ocorrem
eventos de subida, mostrados em azul.
De forma análoga ocorrem eventos de descida quando o sinal de tensão passa do semicírculo
positivo para o negativo.
5.3.2. A detecção de Zero de Corrente
Para a detecção de zero de corrente o sinal de corrente conforme a figura 5.2 é medido junto
ao R3, cuja função é manter um fluxo de corrente mínimo para que a leitura possa ser
realizada. Este sinal é levado ao pino 6 do LM324, porta inversora, é importante ressaltar uma
42
inversão de sinal, isto se da em função do sinal estar alimentando a porta inversora que se
configura como um novo comparador.
O diodo D7 tem a função de ceifar a onda na parte negativa do sinal.
Figura 5.4 - Detecção do Zero de Corrente .
No software do Proteus 7 Professional, podemos observar o sistema de detecção de passagem
por zero da corrente. Foram realizadas as simulações e obtidos os resultados conforme a
figura 5.4, em amarelo representa o sinal de corrente proveniente da rede de alimentação das
cargas e em azul representa o sinal da saída do comparador (catodo do diodo D7).
Neste momento observamos que quando a corrente passa do semicírculo negativo para o
positivo tem eventos de descida na saída do comparador. De forma análoga temos eventos de
subida na saída do comparador quando a corrente faz o caminho inverso, ou seja, sai do
semicírculo positivo e entra no negativo.
43
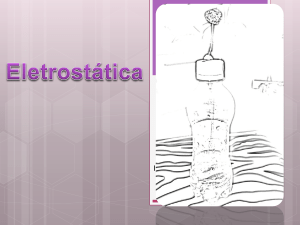
5.3.3. Defasagem de Corrente e Tensão
Na figura 5.5 pode ser observado o sinal de defasagem de corrente e tensão é capturado pelo
sensor de detecção de tensão e corrente descrito acima, quando o sinal de tensão é
representado pela linha de cor amarela passa por zero, a tensão do semicírculo negativo para o
semicírculo positivo. No momento em que o sinal de corrente representa pela linha de cor
Azul passa por zero, do semicírculo positivo para o negativo, que é representado por eventos
de descida do sinal temos o intervalo de tempo que mostra a de defasagem entre os sinais de
tensão e corrente.
Figura 5.5 – Defasagem de Tensão e Corrente.
Por se tratar de um sistema trifásico a composição final do sensor contém de três circuitos
idênticos ao que acaba de ser descrito, sendo cada circuito vinculado a uma fase e responsável
por realizar as medidas de defasagem referente a esta fase.
Os sinais recolhidos nas três fases são multiplexado por meio de uma porta and digital. Esta
multiplexação é realizada por três diodos e tem a função de juntar os sinais provenientes das
três fases (em fios diferentes) para então levar ao micro controlador através de um único fio.
44
6. RESULTADOS
O balanceamento de cargas no secundário do transformador foi implementado na lógica
Ladder no software Proficy Machine Edition 5.9 baseado no algoritmo das três fases. O
balanceamento de carga entre alimentadores no sistema de distribuição consiste em uma
redistribuição de cargas entre os mesmos pela mudança do estado aberto/fechado dos relés no
sistema distribuição, algumas cargas podem ser transferidas de um alimentador para outro,
tornando o sistema mais balanceado e reduzindo o risco de sobrecarga.
O balanceamento é garantido pelo conhecimento prévio da corrente de cada carga e a decisão
de alocar a carga na fase A, B ou C é tomada antecipadamente, ou seja, antes da carga ter sido
acionada.
6.1.
Simulação com Ferramentas Computacionais
Na simulação do circuito de controle para medir a defasagem as três fases com a entradas de
cargas utilizamos o Proteus 7 Professional como podemos observar na figura 6.1 e na figura
6.2 o circuito para chaveamento das fases balanceamento das cargas no secundário do
transformador.
45
Figura 6.1 – Diagrama do Circuito de Controle.
Figura 6.2 – Diagrama do Circuito de Entrada e Saída de Cargas.
Para realizamos as simulações adotaram as distribuições de cargas com os seguintes valores
de indutância e resistências.
46
1º Teste: Alocação Inicial das cargas
Fase 1: R=50Ω;
Fase 2: L= 10mH , R=50 Ω;
Fase 3: L= 100mH , R=50 Ω.
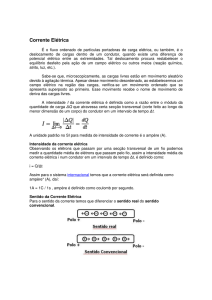
Podemos observar na figura 6.3 a defasagem nas três fases de acordo com os valores das
cargas acima:
Figura 6.3 – Defasagem nas Três Fases.
2º Teste: Alocando mais carga na fase 1 como podemos observar na figura 6.4 a defasagem
no circuito.
Fase 1: R=20mH , R=50 Ω;
Fase 2: L= 10mH , R=50 Ω;
Fase 3: L= 100mH , R=50 Ω.
47
Figura 6.4 – Defasagem nas Três Fases.
Na programação do CLP GE Fanux Versa Max o balanceamento é garantido pelo
conhecimento prévio da corrente de cada carga e a decisão alocar a carga na fase A, B ou C é
tomada antecipadamente, ou seja, antes da carga ter sido acionada.
Podemos dividir o algoritmo em alguns passos:
Passo 1 – Identifique as fases mais e menos carregadas e chame os de FA, FB e FC,
respectivamente.
Passo 2 – Calcular a corrente média em cada fase e o grau de desbalanceamento em
cada fase medido em porcentagem.
Passo 3 – Verificar cada fase possui menor módulo de corrente e alocar as cargas na
respectiva fase menos carregada.
Passo 4 – Verificar as entradas de novas cargas nas fases, aguardando solicitação do
comando para que a carga possa ser alocada efetivamente
Passo 5 – Programar as saídas das cargas na sua respectiva fase, através de solicitação
do comando para que possa ser desligada efetivamente.
Passo 6 – Programar as realocações das cargas nas fases menos carregadas para obter
um sistema balanceado.
48
No diagrama da programação Ladder no Proficy Machine Edition 5.9 simulamos os passos
acima do algoritmo das três fases. No programa principal, Main como podemos observar na
figura 6.5 chamamos os blocos das rotinas para calcular o corrente média, desbalanceamento
de cargas, grau desbalanceamento e a verificação de qual fase está com menos corrente para a
realocação na fase.
Figura 6.5 - Proficy Machine Main.
Adotamos os seguintes valores de corrente para as cargas:
• C1= 3[A];
• C2= 4[A];
• C3= 5[A];
• C4= 4[A];
• C5= 3[A].
A figura 6.6 podemos observar a alocação de cargas nas fases onde apresentamos a diagrama
ladder para simular a entrada de novas cargas no sistema, cuja PW_Manual é um botão para
ligar as cargas e o bloco EQ_INT realiza a verificação de qual fase pode ser alocada a carga.
49
Figura 6.6 - Proficy Machine Entradas de Cargas.
Na figura 6.7 pode ser observado os cálculos para verificação da quantidade de corrente
médio das três fases, o desbalanceamento e o grau de desbalanceamento em cada fase medido
em porcentagem.
50
Figura 6.7 - Proficy Machine Verificação das Fases.
O controle e monitoramente de entradas e saídas de cargas são realizados no supervisório
Elipse Scada como podemos obervar na figura 6.8.
51
Figura 6.8 - Eclipse Scada Balanceamento de Cargas.
6.2.
Circuito
A descrição do diagrama elétrico mostrado na figura 5.2 representa as ligações do sensor nas
três fases e a figura 6.9 mostra o circuito montado no protoboard.
52
Figura 6.9 – Circuito de Controle.
6.3.
Teste na Maquete
Realizamos os testes de alocação de cargas no supervisório Elipse Scada como podemos
observar a figura 6.10 baseados no algoritmo das Três Fases.
53
Figura 6.10 – supervisório Eliplse Scada.
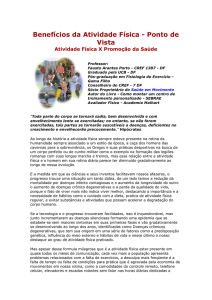
O supervisório aciona as cargas na maquete, como pode ser observado na figura 6.11,
primeiramente entrando com um conjunto de duas lâmpadas, a seguir entrado com
ventiladores e mais um conjunto de duas lâmpadas com mostra a figura 6.12.
54
Figura 6.11 – Maquete Alocação das Cargas.
Figura 6.12 – Maquete Alocação de um Banco de Cargas.
55
Os resultados obtidos foram satisfatórios, pois o supervisório identificou as fases mais e
menos carregadas e chame os de FA, FB e FC, respectivamente. Calcularam a corrente média
em cada fase e o grau de desbalanceamento em cada fase medido em porcentagem,
verificaram cada fase possui menor módulo de corrente e alocou as cargas na respectiva fase
menos carregada. As entradas de novas cargas nas fases, aguardando solicitação do comando
para que a carga possa ser alocada efetivamente. Programaram as saídas das cargas na sua
respectiva fase, através de solicitação do comando para que possa ser desligada efetivamente.
Programaram as realocações das cargas nas fases menos carregadas para obter um sistema
balanceado.
56
7. CONCLUSÃO
A crescente competitividade nos mercados de bens duráveis onde a eletricidade se apresenta
como um importante insumo tem provocado a busca por tecnologias mais eficientes visando à
modernização da planta industrial e minimização do consumo. Neste contexto a proporção de
venda de equipamentos com tecnologias avançadas do ponto de vista operacional e energético
vem crescendo de forma notável.
Ocorre, entretanto que, sendo estes equipamentos, em geral, muito mais sensíveis a problemas
associados à qualidade da energia elétrica, têm sido registradas inúmeras paradas da linha
produtiva devido à má operação ou desligamentos intempestivos pelo sistema de proteção,
provocando muitas vezes grandes prejuízos financeiros. Entre os distúrbios na qualidade da
energia destacam-se os desbalanceamento do sistema de suprimento de energia elétrica,
provocados pela alimentação de cargas desequilibradas de grande e médio porte.
Os resultados obtidos por simulação digital na plataforma computacional “Proteus 7
Professional” mostraram-se, coerentes para a compreensão das influências das cargas no
sistema e identificação e minimização dos desbalanceamento nas fases do secundário do
transformador.
Os resultados deste trabalho apresentaram satisfatórios, pois a implementação de um
supervisório Elipse Scada baseado na programação do CLP GE Fanuc Versa Max para o
monitoramento e atuação no período de desbalanceamento de cargas nas linhas de
alimentação possibilitando a correção automaticamente dos valores de corrente entre as fases.
Neste trabalho apresentou-se uma implementação do algoritmo das três fases para
balanceamento carga entre alimentadores no sistema de distribuição corresponde a uma
redistribuição de cargas entre os mesmos. Pela mudança do estado aberto/fechado dos relés no
sistema distribuição, algumas cargas podem ser transferidas de um alimentador para outro,
tornando o sistema mais balanceado e reduzindo o risco de sobrecarga.
57
8. SUGESTÕES DE TRABALHOS FUTUROS
Pelo tempo em que o trabalho foi executado, e pelo tema complexo tratado, algumas lacunas
foram deixadas, mas uma continuação deste trabalho com estudos mais detalhados pode ser
realizada para que o chaveamento dinâmico das cargas entre as fases seja um mecanismo
ideal para o problema. O principal objetivo foi atingido a implementação do algoritmo das
três fases no chaveamento de cargas utilizando como equipamentos CLP (Controlador Lógico
Programável),
contatos
elétricos
e
dispositivos
eletrônicos
para
problema
do
desbalanceamento do sistema elétrico.
Com os resultados satisfatórios obtidos com a conclusão deste trabalho e visando a
implementação do trabalho com a inclusão de técnicas as apuradas e equipamentos com o
objetivo de acrescentar melhorias que virão contribuir expressivamente para viabilização do
projeto para desenvolvimento de novas soluções industriais de baixo custo para controle de
demanda de carga.
Um estudo mais detalhado para o algoritmo das três fases, para melhorar a sua
adaptação na utilização para o problema do desbalanceamento de tensões entre fases
elétricas;
Implementação do algoritmo das três fases via programação estrutura, torna se
importante para evitar repetições nas operações de chaveamento
Priorizar a entrada e saída de cargas no sistema.
A utilização de outros algoritmos ou até mesmo a elaboração de um novo algoritmo
próprio para o problema, também se torna um caminho aberto para novos trabalhos.
58
REFERÊNCIAS BIBLIOGRÁFICAS
AOKI, K., Kuwabara, H., Satoh, T. And Kanezashi M. An efficiente algorithm for load
balancing of transformers and feeders by switch operation in large scale distribution
systems, IEEE Transactions on Power Delivery, 1988.
ANEEL – Agência Nacional de Energia Elétrica Legislação. Básica do Setor Elétrico
Brasília – DF, 1998.
CAMPANA, S. Filho, D. O; Adequação de Força Motriz em Sistema de Irrigação por
Aspersão Convencional e Pivô Central.
Disponível
em
http://www.proceedings.scielo.br/scielo.php?pid=MSC0000000022000000200030&script=sci
_arttext. Acesso em 17 Dezembro, 2008.
DEUS, Rivamilton. Sistemas de Controle para Balanceamento de Fases. Monografia
Universidade Federal de Ouro Preto, Ouro Preto, 2007.
GELLINGS, C. W.; Talukdar, S. Load Management, IEEE PRESS. New York: Editorial
Board, 1996.
H.D. Chiang. A Decoupled Load Flow Method for Distribution Power Networks:
Algorithms,Analysis and Convergence Study. Electrical Power & Energy Systems, Vol. 13,
1991.
Hsu Y-Y., Jwo-Hwu Y., Liu, S. S., Chen, Y.W., Feng, H. C. and Lee, Y. M. Transformer
and feeder load balancing using a heuristic search approach, IEEE Transactions on Power
Systems 8(1): 184-190, 1993.
JACK E. Runnels. Evaluation of Demand-Side Management.
Disponível em <http://ieeexplore.ieee.org/stamp/s. jsp?arnumber=01457588>. Acesso em 03
Novembro, 2008.
KASHEM, M. A., Jasmon, G. B. And Ganapathy, V.A new approach of distribution
system reconfiguration for loss minimization, Electrical Power and Energy Systems, 2000.
MAGALDI, Miguel. Noções de Eletrotécnica. 5ª Edição. Rio de Janeiro: Editora Guanabra
Dois S. A.1981.
MCEACHERN, Alex, Voltage Sag Immunity Tests: Some Common Mistakes and How To
Avoid Them. Itajubá/MG, 2004.
MONTICELLI e GARCIA. Introdução a Sistemas de Energia Elétrica, Editora Kluwer,
1999.
NEMA - National Electrical Manufactures Association. CLP Programmble Logic
Controller. Disponível em http://www.nema.org/stds/ia2-2.cfm. Acesso em: 17 Novembro.
2009.
59
PEREIRA,F.Microcontroladores PIC, São Paulo:Érica,2002.
PINHEIRO B. Humberto. Sistema Especialista para Operação de Subestação de Energia
Elétrica. Universidade Estadual de Campinas, Campinas, 1995.
SCHWEITZER ENGINEERING LABORATORIES COMERCIAL. Como medir as
componentes simétricas de um sistema elétrico trifásico? Disponível em
http://www.selinc.com.br/guia_aplic/CompSimetricas.pdf>. Acesso em: 18 Agosto, 2009.