CENTRO ESTADUAL DE EDUCAÇÃO TECNOLÓGICA
PAULA SOUZA
FACULDADE DE TECNOLOGIA DE LINS PROF. ANTONIO SEABRA
CURSO SUPERIOR DE TECNOLOGIA EM BANCO DE DADOS
ROGÉRIO AUGUSTO AVELINO
MAMCEE - MICROCONTROLADOR APLICADO NO
MONITORAMENTO DE CONSUMO DE ENERGIA ELÉTRICA
LINS-SP
2º SEMESTRE/2012
CENTRO ESTADUAL DE EDUCAÇÃO TECNOLÓGICA
PAULA SOUZA
FACULDADE DE TECNOLOGIA DE LINS PROF. ANTONIO SEABRA
CURSO SUPERIOR DE TECNOLOGIA EM BANCO DE DADOS
ROGÉRIO AUGUSTO AVELINO
MAMCEE - MICROCONTROLADOR APLICADO NO
MONITORAMENTO DE CONSUMO DE ENERGIA ELÉTRICA
Trabalho de Conclusão de Curso apresentado à
Faculdade de Tecnologia de Lins para obtenção
do título de Tecnólogo em Banco de Dados.
Orientador: Prof. Me. Alexandre Ponce de Oliveira
LINS-SP
2º SEMESTRE/2012
ROGÉRIO AUGUSTO AVELINO
FOLHA DE APROVAÇÃO
A minha esposa Denise e filhas Anna
Gabriella e Anna Beatriz, pela compreensão e
ausência durante os estudos. A meus pais, Elvira
Avelino e José Avelino com carinho.
“Sei que os momentos perdidos da vida
jamais voltarão e serão vividos de novo, porém é
preciso ausentar-se um tempo da vida para não
padecer amanhã”.
Rogério Augusto Avelino
AGRADECIMENTOS
Primeiramente a Deus e ao Professor Ygor Gonzaga, in memorian. Ao
querido e amigo Mestre Professor Alexandre Ponce de Oliveira por ter me ajudado
na realização deste trabalho. Ao amigo Ricardo Pascoal por ter cedido o gravador e
depurador de PIC juntamente com sua placa de desenvolvimento durante os
estudos e testes. Agradeço também a todos os professores e alunos da Faculdade,
aos amigos pelo companheirismo e paciência.
RESUMO
O objetivo deste trabalho foi possibilitar o monitoramento do consumo de
energia elétrica das residências através de uma interface eletrônica denominada
MAMCEE, esta interface foi desenvolvida com o uso de microcontroladores, seu
monitoramento é feito com transdutores de corrente e tensão modernos em uma
instalação monofásica. A medição é feita através das variações elétricas, tais como,
tensão elétrica e a corrente elétrica. As informações de entrada uma vez
digitalizadas e processadas são compartilhadas de forma direta com os usuários de
energia elétrica através de uma interface. Para que seu entendimento seja possível,
foram abordadas informações na área de elétrica, com seus conceitos básicos,
formas de geração do consumo de eletricidade, regras para efetuar os cálculos da
eletricidade, os tipos de sensores de corrente e os medidores de energia
convencional e digital. Também foi apresentado os conceitos sobre eletrônica, os
componentes eletrônicos necessários para a montagem do MAMCEE. Outro tópico
abordado foi microcontroladores que são componentes com capacidades funcionais
diversas e compostos de diversos recursos, como, contadores, memória de dados e
programas e unidade lógica aritmética. Foi demonstrada a forma de cálculo do
consumo de energia elétrica e aquisição do sinal elétrico, o protótipo do MAMCEE
com o detalhamento de hardware que compõe a interface e as ferramentas
necessárias para o desenvolvimento do firmware, além dos testes efetuados que
demonstram seu funcionamento em um ambiente simulado.
Palavras-chave: Medidor Digital. Interface de Dados. Microcontrolador. PIC.
Eletricidade. Eletrônica.
ABSTRACT
The aim was to enable the monitoring of electricity consumption of households
through an electronic interface called MAMCEE, this interface has been developed
with the use of microcontrollers, their monitoring is done with current and voltage
transducers in a modern installation phase. The measurement is made through the
electrical variations, such as voltage and current. The input information once scanned
and processed are shared directly with users of electricity through an interface. For
his understanding is possible, been addressed in the area of electrical information
with its basic concepts, ways of generating electricity consumption, make rules for
the calculation of electricity, types of current sensors and power meters conventional
and digital . It was also presented the concepts of electronics, electronic components
needed to assemble the MAMCEE. Another topic discussed was microcontrollers
which are components with different functional capabilities and resources of various
compounds, such as accountants, data and program memory and arithmetic logic
unit. It was demonstrated how to calculate the power consumption and purchase of
electrical signal, the prototype MAMCEE with details of hardware that makes up the
interface and tools needed to develop the firmware, in addition to tests performed
that demonstrate its operation in a simulated environment.
Keywords: Digital Miter. Data Interface. Microcontroller. PIC. Electricity. Electronics.
LISTA DE ILUSTRAÇÕES
Figura 1.1 – Átomo de Rutherford ______________________________________ 26
Figura 1.2 – Principio eletrônico ________________________________________ 27
Figura 1.3 – Gerador hidrelétrico _______________________________________ 28
Figura 1.4 – Forma de onda da corrente alternada _________________________ 30
Figura 1.5 – Corrente continua _________________________________________ 31
Figura 1.6 – Elétrons no condutor ______________________________________ 33
Figura 1.7 – Resistência elétrica _______________________________________ 33
Figura 1.8 – Circuito aberto ___________________________________________ 34
Figura 1.9 – Circuito fechado __________________________________________ 35
Figura 1.10 – Representação RUI da Lei de Ohm __________________________ 35
Figura 1.11 – Cálculo da corrente na lâmpada_____________________________ 36
Figura 1.12 – Cálculo da resistência na lâmpada___________________________ 37
Figura 1.13 – Cálculo da tensão na lâmpada ______________________________ 38
Figura 1.14 – Sentido das linhas eletromagnéticas _________________________ 39
Figura 1.15 – Força de interação entre dois imãs __________________________ 40
Figura 1.16 – Fluxo magnético _________________________________________ 40
Figura 1.17 – Efeito do campo na bússola ________________________________ 41
Figura 1.18 – Sentido do campo magnético no condutor _____________________ 42
Figura 1.19 – Efeito do campo sobre condutor em movimento ________________ 42
Figura 1.20 – Efeito do condutor sobre campo variante ______________________ 43
Figura 1. 21 – Efeitos de repulsão magnética _____________________________ 43
Figura 1.22 – Efeito de atração magnética ________________________________ 44
Figura 1.23 – Transmissão via satélite ___________________________________ 45
Figura 1.24 – Tipo de núcleo nos indutores _______________________________ 45
Figura 1.25 – Fluxo magnético no indutor ________________________________ 46
Figura 1.26 – Indutância magnética _____________________________________ 46
Figura 1.27 – TC tipo enrolado _________________________________________ 47
Figura 1.28 – TC tipo barra ___________________________________________ 48
Figura 1.29 – TC tipo janela ___________________________________________ 48
Figura 1.30 – TC tipo núcleo dividido ____________________________________ 49
Figura 1.31 – Invólucro de 5 pinos ______________________________________ 51
Figura 1.32 – Circuito típico de aplicação ________________________________ 52
Figura 1.33 – Diagrama de blocos funcionais _____________________________ 52
Figura 1.34 – Diagrama de pinos _______________________________________ 53
Figura 1.35 – ACS709 montado em superfície_____________________________ 53
Figura 1.36 – Esquema do ACS709 _____________________________________ 54
Figura 1.37 – Lâmpada-hora de Samuel Gardiner __________________________ 55
Figura 1.38 – Medidor de lâmpada-hora de 1878, J.B. Fuller _________________ 56
Figura 1.39 – Medidor químico de energia de Edison _______________________ 56
Figura 1.40 – Medidor da Westinghouse Electric Corporation _________________ 57
Figura 1.41 – Medidor eletrônico monofásico de aplicação residencial __________ 59
Figura 2.1 – Representação gráfica da eletrônica analógica __________________ 61
Figura 2.2 – Átomos de silício ou germânio _______________________________ 62
Figura 2.3 – Elétrons livres ____________________________________________ 62
Figura 2.4 – Junção PN de um diodo ____________________________________ 63
Figura 2.5 – Camada de depleção da junção ______________________________ 63
Figura 2.6 – Símbolo do diodo _________________________________________ 64
Figura 2.7 – Diodo ceifador do ciclo negativo______________________________ 65
Figura 2.8 – Diodo ceifador do ciclo positivo ______________________________ 66
Figura 2.9 – Regulador de tensão por diodo zener _________________________ 67
Figura 2.10 – Foto - diodo e símbolo ____________________________________ 67
Figura 2.11 – Led e simbologia ________________________________________ 68
Figura 2.12 – Transistor PNP genérico __________________________________ 69
Figura 2.13 – Transistor NPN genérico __________________________________ 69
Figura 2.14 – Símbolos de mm resistor __________________________________ 70
Figura 2.15 – Resistor e sua simbologia _________________________________ 71
Figura 2.16 – Capacitor cerâmico e simbologia ____________________________ 71
Figura 2.17 – Capacitor eletrolítico e simbologia ___________________________ 72
Figura 2.18 – Conector borne e simbologia _______________________________ 72
Figura 2.19 – Cristal de quartzo e simbologia _____________________________ 73
Figura 2.20 – Chave button e simbologia _________________________________ 73
Figura 2.21 – Cigarra e simbologia _____________________________________ 74
Figura 2.22 – Display LCD e simbologia _________________________________ 76
Figura 2.23 – MAX232 e simbologia ____________________________________ 76
Figura 2.24 – Conector DB9 e simbologia ________________________________ 77
Figura 2.25 – Tipologia PDIP 24LC512 e simbologia ________________________ 78
Figura 2.26 – OPAMP e simbologia _____________________________________ 79
Figura 3.1 – Arquitetura Von – Neumann _________________________________ 81
Figura 3.2 – Arquitetura Harvard _______________________________________ 82
Figura 3.3 – Diagrama em bloco do PIC 16F877 ___________________________ 83
Figura 3.4 – Tipo PDIP _______________________________________________ 83
Figura 3.5 – Tipo PLCC ______________________________________________ 84
Figura 3.6 – Tipo QFP _______________________________________________ 84
Figura 3.7 – Parte do diagrama interno do PIC16F877A _____________________ 85
Figura 3.8 – Memória simplificada ______________________________________ 86
Figura 3.9 – Mapa de memória de programa e pilha ________________________ 87
Figura 3.10 – Organização dos bancos de memória de dados ________________ 88
Figura 3.11 – Esquema UCP __________________________________________ 90
Figura 3.12 – UCP simplificado com três registros__________________________ 90
Figura 3.13 – BUS de dados no PIC. ____________________________________ 91
Figura 3.14 – Exemplo de I/O simplificado ________________________________ 92
Figura 3.15 – Unidade serial RX e TX com três linhas _______________________ 95
Figura 3.16 – Unidade temporização ____________________________________ 96
Figura 3.17 – Diagrama em bloco do TIMER0/WDT E PRESCALER ___________ 96
Figura 3.18 – Edit project do Mikroc Para PIC _____________________________ 98
Figura 3.19 – Bloco conversor analógico digital ____________________________ 99
Figura 4.1 – Cálculo real da potência instantânea absorvida _________________ 102
Figura 4.2 – Cálculo da potência média _________________________________ 102
Figura 4.3 – Cálculo da potência por segundos ___________________________ 103
Figura 4.4 – Equação potência média __________________________________ 104
Figura 4.5 – Energia temporal consumida _______________________________ 104
Figura 4.6 – Perspectiva de variação de consumo_________________________ 105
Figura 4.7 – Sensor de corrente ACS __________________________________ 106
Figura 4.8 – Linearidade do sensor de efeito Hall _________________________ 107
Figura 4.9 – Linearidade matemática do sensor ACS ______________________ 107
Figura 4.10 – Equação que define sensibilidade do ACS ___________________ 108
Figura 4.11 – Resolução matemática por bit _____________________________ 109
Figura 4.12 – Equação corrente elétrica real absorvida _____________________ 110
Figura 4.13 – Sensor de corrente na rede elétrica _________________________ 110
Figura 4.14 – Sensor de tensão na rede elétrica __________________________ 111
Figura 4.15 – Tensão de saída proporcional _____________________________ 112
Figura 4.16 – Equação tensão elétrica real ______________________________ 113
Figura 4.17 – Diagrama de funcionamento do MAMCEE ____________________ 113
Figura 4.18 – Diagrama modular do MAMCEE ___________________________ 114
Figura 4.19 – MFARD: Suplemento de energia ___________________________ 115
Figura 4.20 – Esquema CCT: Condicionador de tensão ____________________ 119
Figura 4.21 – Esquema CCC: Condicionador de corrente ___________________ 120
Figura 4.22 – MPVD – Visualização e processamento dos dados _____________ 121
Figura 4.23 – MPVD: Referencia de tensão ADC _________________________ 122
Figura 4.24 – Circuito de comunicação serial_____________________________ 123
Figura 4.25 – Estatística da locação de memória do PIC ____________________ 127
Figura 4.26 – Telas de monitoramento e configuração _____________________ 136
Figura 4.27 – Simulação com fluxo de I= 1.519A durante 1 hora______________ 137
Figura 4.28 – 1º Relatório transmitido pela serial __________________________ 137
Figura 4.29 – Simulação com fluxo de I= 25.685A _________________________ 138
Figura 4.30 – 2º Relatório transmitido pela serial __________________________ 138
Figura 4.31 – Configurações com dados da conta de luz ___________________ 139
Figura 4.32 – Conta de um padrão monofásico ___________________________ 139
Figura 4.33 – Tela [4]: Previsão de consumo _____________________________ 140
Figura 4. 34 – Previsão de consumo simulado____________________________ 141
Figura 4.35 – Protótipo em experimento ________________________________ 141
Figura 4.36 – LCD com mensuração em repouso _________________________ 142
Figura 4.37 – LCD em plena mensuração _______________________________ 142
Figura 4.38 – Mensagem de envio de dados _____________________________ 142
Figura 4.39 – Diagrama entidade relacionamento _________________________ 143
LISTA DE QUADROS
Quadro 1.1 – Materiais e sua aplicação __________________________________ 31
Quadro 2.1 – Configuração dos pinos LCD HD47780 _______________________ 75
Quadro 3.1 – Seleção do banco de memória ______________________________ 89
Quadro 3.2 – Port A _________________________________________________ 92
Quadro 3.3 – Port B _________________________________________________ 93
Quadro 3.4 – Port C _________________________________________________ 93
Quadro 3.5 – Port D _________________________________________________ 94
Quadro 3.6 – Port E _________________________________________________ 94
Quadro 4.1 – Terminais do conector CN003 do MFARD ____________________ 117
Quadro 4.2 – Configuração dos pinos PIC16f877A ________________________ 124
Quadro 4.3 – Configuração dos pinos de entrada ADC. ____________________ 124
Quadro 4.4 – Configuração do pino de controle sonoro. ____________________ 125
Quadro 4.5 – Configuração do teclado. _________________________________ 125
Quadro 4.6 – Configuração de controle display LCD. ______________________ 125
Quadro 4.7 – Configuração de controle BCD. ____________________________ 125
Quadro 4.8 – Configuração de comunicação serial RS232. __________________ 125
Quadro 4.9 – Configuração de comunicação com o LCD. ___________________ 126
Quadro 4.10 – Algoritmo básico do MAMCEE. ___________________________ 126
Quadro 4.11 – Custo desenvolvimento MAMCEE _________________________ 140
LISTA DE ABREVIATURAS E SIGLAS
ASCII - American Standard Code for Information Interchange
BIOS – Basic Input/Output System
CISC – Complex Instruction Set Computer
mA – Miliampere
MCCSE – Módulo de Coleta e Condicionamento dos Sinais Elétricos
MCS – Módulo de Comunicação Serial
MFARD – Módulo da Fonte de Alimentação e Referencias de Dados
MHz – MegaHerts
MLP – Modulação por Largura de Pulso
MPVD – Módulo de Processamento e Visualização dos Dados
ms – Millisegundos
mV – Millivolts
NPN – Tipo de polarização (Negativo-Positivo-Negativo)
OPAMP – Operational Amplifier
PCI – Placa de Circuito Impresso
PDIP – Plastic Dual Inline Pac
PIC – Peripherical Interface Controller
PLCC – Plastic Leaded Chip Carrier
Pm – Potência média
PNP – Tipo de polarização (Positivo-Negativo-Positivo)
PWM – Pulse Width Modulation
QFP – Quad Flat Pack
RAM – Random Access Memory
RISC – Reduced Instruction Set Computer
RMS – Root Mean Square
RUI – Lei de Ohm (Resistência - Tensão – Corrente)
RX – Receive
SCL – Serial Clock
SDA – Serial Dados
SFR – Special Function Register
SMD – Surface Mount Device
SPI – Serial Peripheral Interface
TC – Transformador de Corrente
TTL - Transistor – Transistor Logic
TX – Transmission
UCP – Unidade Central de Processamento
ULA – Unidade Lógica Aritmética
USART – Universal Synchronous Asynchronous Receiver Transmitter
USB – Universal Serial Bus
V – Volts
VCA – Tensão em Corrente Alternada
VCC – Tensão em Corrente Continua Diferença de Potencial Positiva
VIOUT – Tensão de Saída
Vref – Tensão de Referência
Vrms – Tensão Real ou Eficaz
VSS – Diferença de Potencial Negativa
W – Watt
WDT – Watchdog
WP – Write Protect Input
LISTA DE SÍMBOLOS
b – Base do transistor
c – Coletor do transistor
e – Emissor do transistor
F – Força resultante
IP- – Corrente primaria positiva
IP+ – Corrente primaria negativa
K – catodo
N – Camada Negativa
P – Camada Positiva
PN – Junção de Camadas Positiva e Negativa
∆Vout – Tensão de saída variável
µA – micro ampére
BAT1 – Bateria de posicionamento esquemático um
D1 – Posicionamento esquemático do diodo
I – Corrente elétrica
Ip – Corrente Primária
Irms – Corrente real ou efical
ISens – Corrente do Sensor
L1 – Posicionamento esquemático da lâmpada
MΩ - Mega Ohm
n – Polaridade ou camada negativa
p – Polaridade ou camada positiva
P – Potência elétrica
R – Resistência elétrica
S – Switch
t – Tempo
U – Tensão elétrica
W – Registrador de trabalho
% - Porcentagem
+V – Tensão Positiva
∆t – Delta tempo
0V – Tensão Nula (zero Volts)
B – Campo elétrico vetorial
BR1 – Ponte de diodo composição esquemático 1
E – Fonte de tensão
Fτ – Trabalho desenvolvido
i(t) – Corrente instantânea
i’ – Corrente elétrica induzida no indutor
iL – Corrente indutiva
L – Indutância
P(t) – Potência instantânea
Ps – Potência fragmentada em segundos
R1 – Resistor com posição esquemático 1
t1 – Primeiro instante
t2 – Segundo instante
TR1 – Transformador de primeira posição esquemático
U1 – Regulador de tensão com posição esquemático 1
U2 – Regulador de tensão com posição esquemático 2
U3 – Regulador de tensão com posição esquemático 3
-V – Tensão Negativa
v(t) – Tensão instantânea
W/s – Watt por segundo
τ - Letra do alfabeto grego (tau)
ϕ – fluxo magnético (Fi)
Ω - Ohm
SUMÁRIO
INTRODUÇÃO____________________________________________19
1 CONCEITOS BÁSICOS DE ELETRICIDADE __________________23
1.1 HISTÓRIAS DA ELETRICIDADE ____________________________________ 23
1.2 A IMPORTÂNCIA DA ELETRICIDADE _______________________________ 25
1.3 TENSÃO ELÉTRICA (U) __________________________________________ 28
1.4 CORRENTE ELÉTRICA (I) ________________________________________ 29
1.5 LEI DE OHM (Ω) – RESISTÊNCIA ELÉTRICA (R) ______________________ 32
1.6 POTÊNCIA ELÉTRICA (P) _________________________________________ 36
1.7 MAGNETISMO __________________________________________________ 39
1.8 ELETROMAGNETISMO___________________________________________ 41
1.9 CAMPO ELÉTRICO (B) ___________________________________________ 41
1.10 CAMPO MAGNÉTICO ___________________________________________ 42
1.11 LEI DE LENZ __________________________________________________ 43
1.12 ONDA ELETROMAGNÉTICA _____________________________________ 44
1.13 INDUTOR (BOBINA) ____________________________________________ 45
1.14 REATÂNCIA INDUTIVA XL (Ω) ____________________________________ 47
1.15 TRANSFORMADOR DE CORRENTE (TC) ___________________________ 47
1.16 MODERNOS SENSORES DE CORRENTE __________________________ 49
1.17 Efeito hall _____________________________________________________ 50
1.18 sensores de corrente por efeito hall _________________________________ 50
1.18.1 ACS 75x ____________________________________________________ 50
1.18.2 ACS709 _____________________________________________________ 53
1.19 MEDIDOR DE ENERGIA ELÉTRICA CONVENCIONAL _________________ 55
1.20 MEDIDORES ATUAIS DE QUILO WATT – HORA _____________________ 57
1.21 MODERNOS MEDIDORES DIGITAIS _______________________________ 58
1.22 PROPOSTA DE TRABALHO ______________________________________ 60
2 CONCEITOS BÁSICOS DE ELETRÔNICA ____________________61
2.1 SEMICONDUTORES _____________________________________________ 61
2.2 DIODO ________________________________________________________ 63
2.2.1 Diodos retificadores _____________________________________________ 64
2.2.2 Diodo zener ___________________________________________________ 66
2.2.3 Foto diodo ____________________________________________________ 67
2.2.4 Diodo emissor de luz ____________________________________________ 68
2.3 TRANSISTOR __________________________________________________ 68
2.4 RESISTOR _____________________________________________________ 70
2.5 CAPACITORES E CONDENSADORES ______________________________ 71
2.6 CONECTOR E BORNE ___________________________________________ 72
2.7 CRISTAL DE QUARTZO __________________________________________ 72
2.8 Chave (PUSH BUTTON) __________________________________________ 73
2.9 BUZZER OU CIGARRA __________________________________________ 74
2.10 CONTROLADOR HD47780 ______________________________________ 74
2.11 MAX232 ______________________________________________________ 76
2.12 CONECTOR DB9 _______________________________________________ 77
2.13 EEPROM _____________________________________________________ 77
2.14 AMPLIFICADOR OPERACIONAL (OPAMP) __________________________ 78
3 MICROCONTROLADOR __________________________________80
3.1 CONTROLADORES versus PROCESSADORES _______________________ 80
3.2 FAMÍLIA PIC ___________________________________________________ 81
3.2.1 Unidades de memória ___________________________________________ 86
3.2.2 Memória de programa ___________________________________________ 86
3.2.3 Memória de dados ______________________________________________ 87
3.3 UNIDADE CENTRAL DE PROCESSAMENTO _________________________ 89
3.4 UNIDADE DE ENTRADA E SAÍDA __________________________________ 91
3.5 COMUNICAÇÃO SERIAL _________________________________________ 95
3.6 UNIDADE DE CONTAGEM/TEMPORIZAÇÃO _________________________ 95
3.7 DIVISÃO DO RELÓGIO (PRESCALER) ______________________________ 97
3.8 WATCHDOG ___________________________________________________ 97
3.9 CONVERSOR ANALÓGICO DIGITAL ________________________________ 98
4 MAMCEE _____________________________________________101
4.1 CÁLCULO DE CONSUMO DE ENERGIA ____________________________ 101
4.2 AQUISIÇÃO DOS SINAIS ELÉTRICOS ______________________________ 105
4.2.1 Formação do sinal de corrente ___________________________________ 105
4.2.2 Digitalização do sinal de corrente _________________________________ 108
4.2.3 Formação do sinal de tensão ____________________________________ 111
4.2.4 Digitalização do sinal de tensão __________________________________ 112
4.3 PROTÓTIPO MAMCEE __________________________________________ 114
4.3.1 MFARD _____________________________________________________ 116
4.3.2 MCCSE _____________________________________________________ 118
4.3.3 MPVD ______________________________________________________ 119
4.3.4 MCS _______________________________________________________ 123
4.4 CONFIGURAÇÕES DE HARDWARE _______________________________ 124
4.5 DESENVOLVIMENTOS DO FIRMWARE ____________________________ 126
4.6 MODELAGEM DE DADOS _______________________________________ 143
19
INTRODUÇÃO
Como seria o comportamento da sociedade consumidora de eletricidade se
houvesse meios de monitorar e registrar consumos diários de eletricidade de forma
clara e objetiva aos olhos do consumidor?
Com o constante aumento das tecnologias embarcadas e outros dispositivos
eletrônicos de tamanho reduzidos utilizando pequenos circuitos integrados ampliam
novas perspectivas com alto poder de processamento. Inúmeros são as aplicações
que condicionam facilidade e flexibilidade para possíveis mudanças do firmware. O
mercado atual investe cada vez mais neste seguimento tecnológico. Obtém-se
crescente e variado propósito computacional com a fusão da informática e a
eletrônica. (SOUZA, 2003)
A eletrônica passou por evoluções importantes até chegar a mais recente
tecnologia, à eletrônica digital, dando vida às novas perspectivas de produtos a sua
base. Primeiro a ciência da eletricidade, que algum tempo depois foi controlada pela
tecnologia
mais
moderna,
à
eletrônica
analógica,
possibilitando
avanços
significativos cada vez melhor até chegar a mais atual ciência da computação. Com
a convergência dessas ciências possibilitaram o nascimento notável dos
componentes
programáveis,
esses
eram
os
microprocessadores
e
os
microcontroladores que sequencialmente alavancaram o crescimento do setor
tecnológico automatizado. (MELO; PINHO, 2010)
Atualmente com seu baixo custo os microcontroladores são cada vez mais
empregados no processamento e funções em equipamento de processos indústrias
e doméstico em geral, como por exemplo, televisores, os obsoletos aparelhos de
tocar CD, DVD e outros. Com a globalização e a disseminação da internet
possibilitou que esse tipo de informações chegasse a todos. (SOUZA, 2003)
Os microcontroladores podem atuar em diversas áreas, a tecnologia não
impõem barreiras e dão a eles total credibilidade funcional. Sistemas como controle
de processos e monitoramento são situações mais comuns de aplicação desses
componentes programáveis. Os microcontroladores possuem em um único chip
funcionalidades lógicas e matemáticas ficando por conta do projetista sua
implantação e criatividade. Um recurso que faz dos microcontroladores ferramentas
indispensáveis na geração de informações automática para bando de dados a partir
20
de grandezas reais é o seu recurso de conversão analógico digital (ADC). (SOUZA,
2003)
O estudo aqui tratado por essa monografia traz informações de diversas
áreas e conhecimentos convergidos em um conteúdo bastante sólido de forma a
fomentar o desenvolvimento e pesquisas em áreas pouco exploradas por estudantes
de tecnologia da informação.
Na existência de um projeto desenvolvido pelo Instituto Fraunhofer na
Alemanha que monitora diariamente o consumo de eletricidade através do uso de
sensores, que colocados em cada um dos aparelhos elétricos de uma residência,
este sistema calcula o consumo de corrente elétrica de cada aparelho e
automaticamente compara esse consumo obtido em tempo real com a média
histórica apresentada pelo aparelho. (INOVAÇÃO Tecnológica, 2010)
O objetivo deste trabalho é propor e desenvolver o MAMCEE, um
microcontrolador aplicado no monitoramento e consumo de energia elétrica. É um
sistema microcontrolado com o mesmo propósito do projeto desenvolvido na
Alemanha, entretanto, a não utilização de sensores para cada aparelho elétrico
residencial diminui muito seu custo tornando viável a sua aplicação em residências
que possuem padrões de entrada de energia monofásica.
O MAMCEE é uma interface eletrônica que tem o propósito de fazer o
monitoramento da entrada principal do fornecimento de energia elétrica através de
transdutores de corrente e tensão modernos e com isso poderá calcular o consumo
de eletricidade diária total, sendo diferente do sistema alemão que traz esse
monitoramento individual. O MAMCEE utiliza-se de dois fatores dinâmicos
importantes da eletricidade, a tensão e corrente elétrica existente na rede principal
de fornecimento de energia elétrica.
Em conjunto com a interface eletrônica de monitoramento de consumo de
eletricidade, propõe-se futuramente o desenvolvimento de um software que poderá
fazer acoplamento com a interface eletrônica para coletar as informações do
MAMCEE e armazenar em um banco de dados para fazer as devidas análises de
consumo. Para viabilizar este projeto foram realizados estudos e pesquisas de livros
específicos da área de engenharia elétrica e eletrônica, conceito de eletricidade
básica, cálculos de potência e consumo. Consultas de regras de negócio e processo
de tarifa do consumo de eletricidade, além de tutoriais técnicos e DATASHEETS do
21
fabricante do microcontrolador da família PIC, porém outros microcontroladores
poderão ser pesquisados e utilizados de acordo com as necessidades e avanço do
projeto.
A leitura da corrente que flui por uma fiação fase de uma instalação
consumidora residencial tem por objetivo ser monitorada e armazenada. O
monitoramento será feito por um sensor conhecido pelo meio técnico de
transformador de corrente ou sensor de corrente. A escolha do sensor será
conforme o tipo do padrão a ser monitorado, no caso em estudo será um sensor com
característica de corrente por volta de 70 amperes apropriado para um padrão de
entrada de energia de categoria A2 monofásico de até 15KW e tensão de
fornecimento 127/220 Volts (V) ou 220/380 V conforme o tipo de fornecimento da
região aplicado. O sensor fará a leitura analógica da eletricidade existente no mundo
real e o microcontrolador por sua vez tem a funcionalidade de converter essas
informações em sinais elétricos compatíveis deixando-as apropriadas para futuras
aplicações computacionais.
O estudo e uso dos microcontroladores junto aos
desenvolvedores de aplicações, podem de alguma maneira colaborar com o avanço
tecnológico brasileiro encurtando os laços entre o desenvolvedor de hardware e
software. O presente trabalho esta estruturado em quatro capítulos:
Capitulo 1 – Reúne informações e pesquisas realizadas na área de elétrica.
Conhecimentos básicos e específicos da eletricidade são de extrema importância
para a realização deste trabalho. Forma de geração, elementos que a compõem e a
maneira de consumo da eletricidade. Leis e regras para cálculos elétricos. Os efeitos
da corrente elétrica em movimento e tipos de sensores de corrente. Os medidores
de energia convencional e modernos medidores digitais.
Capitulo 2 – Apresenta os conceitos básicos de eletrônica. Conhecer alguns
componentes eletrônicos utilizados no desenvolvimento do hardware MAMCEE
ajuda compreender melhor a relação entre as duas partes aparentemente distantes.
Capitulo 3 – Neste capitulo é tratado do elemento principal, o microcontrolador
escolhido
para
desenvolvimento
do
projeto.
Os
microcontroladores
são
componentes fantásticos com capacidades funcionais diversas, portanto conhecê-lo
a fundo traz melhor funcionamento e desempenho das tarefas a serem dedicado.
Com recursos de contadores, interrupções, memória de dados e programas, unidade
lógica aritmética, entrada e saídas. Esses componentes programáveis favorecem
22
desenvolvimentos em áreas de tecnologia diversas.
Capitulo 4 – Neste capitulo são apresentados ideias e metodologia estuda e
defendidas pelo autor objetivando solucionar as questões básicas induzidas pelo
avanço da tecnologia da informação de maneira simples e visível ao entendimento
de estudantes de informática. Nessa etapa poderá ser compreendida a lógica básica
do MAMCEE e áreas convergidas na solução do problema.
Conclusão – Com o desenvolvimento do capitulo 4 descrevem-se soluções,
perspectivas e problemas encontrados na realização deste trabalho deixando em
aberto para futuras implementações.
23
1 CONCEITOS BÁSICOS DE ELETRICIDADE
Neste capitulo será tratado sobre conceitos importantes sobre a eletricidade
desde sua descoberta e caminhos percorridos durante sua evolução. Os elementos
principais que a compõem e leis importantes que fizeram da eletricidade novos
efeitos colaborando para o crescimento e avanço da tecnologia mundial. A
eletricidade é um fenômeno inesgotável de energia, porem para que sua produção
aconteça envolve conceitos de geração bastante poluente e agressiva ao meio
ambiente. Para evitar que essa agressão direta ou indiretamente avance de forma
descontrolada, é hora de, a sociedade conhecer melhor esse fenômeno desde sua
geração a seu consumo final.
1.1 HISTÓRIAS DA ELETRICIDADE
Antes que os homens ao menos soubessem o que seria a eletricidade, este
fenômeno já era parte da natureza. Na Grécia Antiga os filósofos gregos como
exemplo, Thales de Miletus, em 600 a.C., tinha o conhecimento que esfregando uma
peça de âmbar (resina fóssil) com um pedaço de lã ou pele conseguia atrair
pequenos pedaços de palhas. A palavra elétrons na verdade deriva de âmbar
(elektron) em grego. Com essa descoberta originou-se a ciência da eletricidade.
(MELO; PINHO, 2010)
Enquanto na Grécia Antiga os gregos também sabiam que algumas “pedras”
encontradas
em
Magnésia,
tinha
a
capacidade
de
atrair
certos
metais
exclusivamente o ferro. Essa “pedra” chamada magnetitas fazia tal atração sem a
necessidade de esfregar, ao contrario da força estática gerada pelo âmbar de Talles.
A descoberta e estudo desse fenômeno natural originaram a ciência do magnetismo.
Por volta do século 11, os árabes e chineses também utilizavam dessa descoberta
para orientação sobre a água para navegarem. Nasceram então as Bússolas.
(MELO; PINHO, 2010)
Em 1269, Pierri de Maricourt fez o primeiro estudo sistemático da magnetita,
conhecida nos dias atuais como imã. Utilizando-se de uma agulha magnetizada,
traçaram o que chamava de “linhas de força” ao redor de uma esfera de magnetita.
Descobriu-se que essas linhas convergiam em duas regiões em lados opostos da
24
esfera, como as linhas longitudinais da Terra. Chamando-as por dedução onde as
linhas se convergem por pólos. (MELO; PINHO, 2010)
Estendendo esse trabalho, Willian Gilbert em 1600, em sua teoria conclui que
a Terra também se comportava como um gigantesco imã. Observou também em
1753, que os relâmpagos eram atraídos por peças de ferro, surgindo convergência
entre a eletricidade e o magnetismo. Os estudos dessa relação estenderam-se até
que as duas ciências tornassem clara ao seu entendimento. (MELO; PINHO, 2010)
O primeiro a distinguir a relação entre o fenômeno elétrico e magnético foi
Willian Gilbert médico da rainha Elizabeth I, sendo ele quem denotou a palavra
eletricidade derivando-a de “elektron” significado de âmbar em grego. Gilbert deixou
também esclarecido que a propriedade de atração não era exclusiva do âmbar e sim
de várias outras substâncias que ao serem esfregadas também poderiam carregar
eletricamente. (MELO; PINHO, 2010)
Em 1729 veio a descoberta cientificamente dos condutores de eletricidade e
os isolantes. Na experiência concedida com um bastão de vidro e uma esfera de
marfim, Stephen Gray observou que era possível transferir cargas elétricas do
bastão de vidro para esfera de marfim. A transferência só acontecia quando a esfera
era pendurada por um barbante, ocorrendo o efeito isoladamente e quando era
pendurado com fio metálico o fenômeno não ocorria, tendo então a absorção, ou
seja, o consumo das cargas pelo fio metálico. Stephen Gray, conclui que parte das
substâncias poderia classificá-las como condutoras e isolantes. Dentre os
condutores classificam-se os metais e soluções iônicas as quais permitem o trafego
livre das cargas elétricas. Enquanto que os isolantes, por exemplo, a madeira seca,
o plástico, a borracha e vidro não permitem tal efeito de trafego das cargas. (MELO;
PINHO, 2010)
Em outra experiência, Stephen Gray, a posse de um pedaço de vidro e um de
seda, flexionando um ao outro observou que ambos ficaram carregados. Confirmou
então a sua experiência amarrando duas bolas de isopor suspensas com linha no
mesmo centro de apoio e que, ao tocar ambas com o vidro, as bolas de isopor se
afastavam uma da outra num efeito repelente; concluindo que cargas iguais se
repelem. Depois utilizando de mesma base da experiência anterior, tocou uma das
bolas com o vidro e a outra com a seda ocorrendo o efeito da atração. Stephen
Gray, conclui que as cargas opostas se atraem. (MELO; PINHO, 2010)
25
Aproveitando como base a experiência de Stephen Gray, Charles Du Faye,
em 1733 na oportunidade observa a existência de duas cargas “fluxos elétricos”.
Apoiando a visão na experiência sobre as cargas de Stephen Gray, chamando o tipo
de carga do vidro de “vítreo” e a carga da seda ou do âmbar de “resinoso”,
acreditando que essas cargas eram separadas pelo efeito da fricção. (MELO;
PINHO, 2010)
Em sua proposta Benjamin Franklin, 1750, conduziu que os efeitos baseados
nas experiências anteriores apresentadas por Stephen Gray, que um único tipo de
fluido flui de um corpo para o outro pela fricção. Considerou que positivamente
carregado o corpo que acumulou fluido e de negativamente carregado o corpo que
perdeu fluido. Outra experiência obteve utilizando duas pessoas, onde as colocando
sobre um pedestal, ou seja, isoladas do chão para não perder carga. Considerou
uma como pessoa A e a outra como B. Carregando A com carga esfregando um
bastão de vidro e a B carregando esfregando pano de seda.
Utilizando de um
terceiro individuo, C, aproximando de qualquer um deles produzia faísca. Portanto se
A e B se tocassem não acontecia nada. Concluiu então que as cargas armazenadas
no bastão de vidro e na seda, mesmo sendo opostas eram de mesma amplitude
deduzindo que uma carga nunca é criada ou destruída, mas simplesmente
transferida de um corpo para o outro. Atualmente chamamos essa propriedade de
Conservação da Carga. (MELO; PINHO, 2010)
1.2 A IMPORTÂNCIA DA ELETRICIDADE
O que seria da humanidade e de toda tecnologia criada por ela sem esse
fenômeno “eletricidade“. Pensar em tecnologia sem falar dela não teria o menor
sentido. Sua presença é, sem duvida, o propósito real de todos que evoluem e faz
de sua existência o avanço e o crescimento educativo da sociedade mundial
moderna. (MARKUS, 2001)
Falando em tecnologia, tudo o que se tem hoje pode se considerar sua alma
para funcionamento e que sem eletricidade não haveria tecnologias nenhuma tão
pouca a informática. O avanço da utilização nos conceitos elétricos e lógicos corre
como sangue através deste fantástico fenômeno chamado eletricidade. (MARKUS,
2001)
26
Embora o fenômeno ocorra há muito tempo, antes mesmo de sua descoberta
não se pode falar de eletricidade sem ao menos tocar no acontecimento histórico
com o estudioso americano Benjamin Franklin que, em sua experiência soltando
pipa em um dia de tempestade queria provar que os raios seriam fenômenos de
natureza elétrica, Franklin recebeu uma descarga que seria fatal e nasceu então a
ideia do para-raios. (MARKUS, 2001)
Investigação cientifica sobre o fenômeno foram realizadas e esclarecendo que
a explicação natural da eletricidade vem dá estrutura da matéria, os átomos. Os
átomos são considerados as menores partes de uma matéria e são partículas
indivisíveis. O átomo é formado por: prótons, nêutrons e elétrons. Os prótons são
partículas encontradas no núcleo do átomo junto com nêutrons responsáveis em
estabilizar as cargas positivas dos prótons. Os átomos possuem em seu redor uma
camada chamada de eletrosfera por existir partículas de elétrons. Os elétrons por
sua vez são cargas elétricas negativas que estão constantemente em movimento.
Os átomos a principio possuem o mesmo número de elétrons e prótons, ou seja, é
eletricamente neutro. Com essa razão o total de cargas positiva anula o total de
cargas negativas, dando sentido e importância matemática dos nêutrons em um
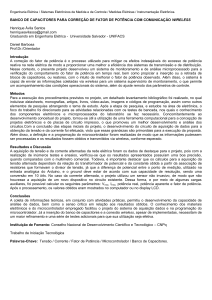
átomo conforme pode ser analisado na figura 1.1.
Figura 1.1 – Átomo de Rutherford
Fonte: Markus, 2001, p. 5.
Na ilustração da figura 1.1 é demonstrado como um átomo é organizado e
também sua composição central. O núcleo é constituído por prótons próximos uns
aos outros graças aos nêutrons mantém-se equilibrados, pois sem os nêutrons os
prótons seriam repelidos do centro do núcleo. Demonstra também a região externa e
27
ativa do átomo onde a orbita é constituída por elétrons livres que circulam em seu
torno.
Os prótons têm carga elétrica +1, o nêutron tem carga elétrica nula, e os
elétrons carga elétrico -1. Para que um átomo seja neutro, o numero de prótons tem
que ser igual ao numero de elétrons. Os prótons e nêutrons ficam reunidos no centro
do átomo chamado núcleo atômico. Como os opostos se atraem e os semelhantes
se repelem, os neutros servem para impedir que os prótons reunidos no centro do
átomo entrem em contato entre si. Os elétrons giram em torno do núcleo em uma
orbita chamada de eletrosfera. (SALMERON, 1962)
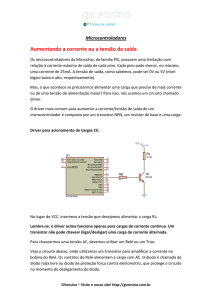
Figura 1.2 – Principio eletrônico
Fonte: Isis, 2010, adaptado pelo autor.
Na perda de elétrons, um átomo fica com excesso de partículas positivas
(prótons), e sua carga elétrica fica positiva. Ao ganhar elétrons, ele fica com excesso
de partículas negativas e sua carga elétrica fica negativa. Átomos com carga elétrica
são chamados de íons. Quando esses têm carga positivas são chamados de cátion
e com cargas negativas são chamados de ânion. (SALMERON, 1962)
Esse mesmo efeito pode ser verificado em um circuito elétrico; quando ele é
alimentado por uma pilha de 1,5 Volts (V) é fechado por uma unidade consumidora,
o resistor R1 como na figura 1.2 a seguir. O lado da pilha que recebe elétrons é
chamado de pólo negativo e o lado que doa elétrons é chamado de pólo positivo.
A figura 1.2 mostra um simples circuito elétrico formado pela bateria BAT1 de
1,5V e de uso comercial, um resistor de 100 Ohms (Ω) usado como carga. A idéia
consiste em apresentar o principio de geração do efeito elétrico a partir de átomos
acumulados no interior da pilha. A pilha consiste de dois pólos carregados de
átomos em sua estrutura interna associados a dois metais com diferença atômica.
Essa associação quando ligados através de seus dois pólos proporcionados pela
28
reação eletroquímica, quando unidos produzem eletricidade ocasionado pelo efeito
de doação e recepção de elétrons. O pólo positivo é caracterizado pela perda de
elétrons e o pólo negativo por ganho de elétrons. Um voltímetro ligado em paralelo
com o circuito confirma o efeito. (SALMERON, 1962)
1.3 TENSÃO ELÉTRICA (U)
Segundo Salmeron (1962), a tensão no geral é uma força que impulsiona ou
atrai algo para exercer uma atividade, já a tensão elétrica (V=voltagem), é a força
que impulsiona os elétrons em um fio condutor. Um fio condutor é um tipo de
material que tem a capacidade de transportar elétrons.
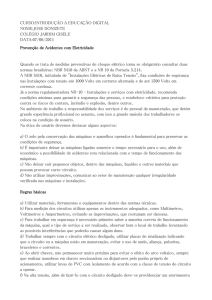
Figura 1.3 – Gerador hidrelétrico
Fonte: EE, 2010.
Na geração convencional de eletricidade, um fio condutor por si só não tem
capacidade de gerar eletricidade. Para que um enrolado de fios gere eletricidade,
deve haver influência por um campo elétrico que exercendo uma força
eletromagnética causa a troca de íons entre os átomos presente nesse condutor.
Essa força só é possível através de mecanismos geradores. Um gerador por sua vez
provoca movimentos de íons ou elétrons nesse condutor em ciclos infinito. Essa
influência causa atrito entre os elétrons existentes na matéria do enrolamento
29
condutor. Ação que provoca o seu movimento e geração de eletricidade em
freqüências de 50 e 60 Hertz (Hz) com tensões nominais respectivamente de 127 e
220 Volts (V).
A figura 1.3 apresenta um gerador convencional de eletricidade. Um gerador é
formado por partes fixas e moveis. A parte fixa é responsável em manter a estrutura
de indução e apoio do gerador. A parte móvel é chamada de rotor que gira na
passagem da água desenvolvendo uma diferença de potencial motivado pelo atrito
indutivo do campo permanente do imã. Essa movimentação ordenada atua
diretamente
sobre
os
elétrons
ali
estacionados
gerando
a
eletricidade.
(SALMERON, 1962)
1.4 CORRENTE ELÉTRICA (I)
Entre os elementos que compõem a eletricidade, o que tem a carga elétrica
se deslocando em um fio condutor é chamado de corrente elétrica (I). Esse
movimento se dá através da tensão que impulsiona os elétrons em movimento
enquanto sua origem geradora estiver em funcionamento.
“Para que a carga elétrica se desloque entre dois pontos de um condutor é
necessária que exista entre esses dois pontos uma diferença de potencial.
Existem muitos dispositivos que produzem essa diferença de potencial.
Esses dispositivos são chamados geradores.” (SALMERON, 1962, p. 131)
Segundo SALMERON (1962), uma corrente elétrica quando aplicada em um
circuito elétrico tende a causar efeitos. O resultado causado pelo efeito da corrente
elétrica em um circuito pode ser diverso. Os efeitos mais comuns são:
Aquecimento do fio condutor “EFEITO TERMICO”.
Geração de campo elétrico em volta do fio condutor “CAMPO
MAGNÉTICO”.
Liberação de hidrogênio e oxigênio “EFEITO QUIMICO”.
Choque elétrico “EFEITO FISIOLÓGICO”.
Intensidade de corrente elétrica é a quantidade de elétrons que circulam em
um fio condutor e que uma carga ligada consome durante certo intervalo de tempo.
A corrente elétrica tem sua intensidade inconstante no decorrer do tempo. Essa
flutuação é decorrente do aumento ou diminuição do consumo de corrente elétrica
30
em um determinado circuito consumidor. Essa intensidade requer fios condutores
com bitolas ou diâmetros de áreas compatíveis a essa quantidade de corrente
elétrica necessária para tal trabalho. (SALMERON, 1962)
Segundo Boylestad (1998) corrente elétrica alternada (CA), é aquela que
varia com o decorrer do tempo, ora os elétrons correm para um lado, ora para outro
lado sucessivamente enquanto o gerador de eletricidade estiver girando.
Normalmente essa é aproveitada pelos eletrodomésticos nas tensões de 127 V e
220 V com freqüências padrões de 50 Hertz (Hz) e 60 Hz sucessivamente em
nossas casas. Essa forma de onda pode ser mais bem entendida visualizando sua
forma de onda característica na figura 1.4.
Figura 1.4 – Forma de onda da corrente alternada
Fonte: Isis, 2010, adaptado pelo autor.
Segundo Boylestad (1998), corrente elétrica continua (CC) apresentada pela
figura 1.5, é aquela que não apresenta variação no decorrer do tempo e possui a
menor quantidade de ruído possível. Normalmente encontramos esse tipo de
corrente em pilhas e baterias de carros conhecidos de acumuladores. Esse mesmo
tipo pode ser conseguido através da corrente alternada e para isso temos que
passá-la por retificadores de corrente e filtros apropriados a eliminar impurezas
indesejadas. Tanto a CC quanto a CA, sua voltagem nunca pode ser aplicada em
circuitos que possuem resistência ôhmica (Ω) igual a zero, pois isso poderia causar
curto circuito e produzir alto aquecimento e pegar fogo na instalação elétrica.
31
Figura 1.5 – Corrente continua
Fonte: Elaborado pelo autor, 2011.
Os tipos de matérias são diversos na natureza. Neste trabalho serão
abordados os que possuem mais utilidades para trabalho com eletricidade. É
importante saber que entre eles existem três tipos de materiais importantes que
colaboraram para uso e controle da eletricidade com segurança. Os materiais
isolantes, os condutores e os semicondutores.
Quadro 1.1 – Materiais e sua aplicação
Material
Cobre
Tungstênio
Carbono
Constantã
Mica
Característica
Baixa resistividade
Alta flexibilidade
Baixa resistividade
Alta temperatura de fusão
Alta resistividade
Baixo
coeficiente
de
temperatura
Média resistividade
Coeficiente de temperatura nulo
Alta resistividade
Baixa resistividade térmica
Plástico e borracha
Alta resistividade
Alta flexibilidade
Baquelita
Alta resistividade
Baixa flexibilidade
Fonte: Markus, 2001, p. 35.
Aplicação
Fabricação de condutores
e cabos elétricos.
Fabricação de filamentos
de
lâmpadas
incandescentes.
Fabricação de resistores
de baixa e média potência.
Fabricação de resistores
de baixa e média potência.
Revestimento
de
resistência
de
aquecimento.
Revestimento
de
fios,
cabos
elétricos
e
ferramentas.
Revestimento
de
dispositivos de controle e
proteção, como chaves e
disjuntores.
32
Isolantes são materiais normalmente utilizados para evitar atritos ou curto
circuito elétricos tanto na corrente alternada (CA) quanto na corrente contínua (CC).
São péssimos condutores de eletricidade e oferece quantidade infinita a resistência
da passagem da corrente elétrica. Alguns materiais dessa categoria mais utilizados
são: porcelana, nylon, celeron, baquelita, outros. (SALMERON, 1962)
Condutores são bons condutores de eletricidade. Oferecem baixa resistência
à passagem da corrente elétrica. Sua aplicação é ampla em diversos setores em que
deseja transferir eletricidade podendo ter, de acordo com sua aplicação, perda ou
não de eletricidade na transmissão. (SALMERON, 1962)
Segundo Salmeron (1962, p. 134), “Nos metais a corrente elétrica é
constituída pelo movimento de elétrons que vão passando de átomo a outro com
grande facilidade”.
Os metais são chamados condutores de primeira classe por possuírem boa
condução eletrônica, ou condução metálica. Já os de segunda classe classificam-se
em soluções de ácidos, bases ou sais em água chamada de condução eletrolítica.
(SALMERON, 1962)
O quadro 1.1 mostra aplicação de alguns materiais condutores mais utilizados
na fabricação de dispositivos elétricos.
Semicondutores são aqueles que não conduzem eletricidade diretamente.
Eles precisam receber certa porcentagem de eletricidade para conduzirem.
Normalmente é utilizado o silício ou germânio na fabricação dos semicondutores
como: diodos, transistores, circuitos integrados e outros derivados dessa tecnologia.
Esses componentes podem ser mais bem entendidos no capitulo seguinte que trata
da eletrônica básica. (SALMERON, 1962)
1.5 LEI DE OHM (Ω) – RESISTÊNCIA ELÉTRICA (R)
Segundo Salmeron (1962) todo material condutor independente de sua
composição apresenta certa resistência elétrica por menor que seja o seu
comprimento. Resistência elétrica é a dificuldade que os elétrons sofrem ao
percorrer o fio condutor para chegar do outro lado. Essa prática é possível de ocorrer
somente, e somente se o circuito estiver fechado, ou seja, as diferenças de potencial
a qual os elétrons foram aplicados estiverem em possível relacionamento.
33
Boylestad (1998) explica que, aplicando certa diferença de potencial nos
terminais de um metal condutivo cuja matéria apresente oposição á passagem de
corrente elétrica, mantendo o valor da voltagem fixa a diferentes valores de material
resistivo quanto menor a resistência, maior a corrente elétrica circulando na
resistência; e, quanto maior a resistência, menor a corrente elétrica que circula por
ela figura 1.6.
Figura 1.6 – Elétrons no condutor
Fonte: Markus, 2001, p. 25.
O símbolo genérico de uma resistência pode ser observado na figura 1.7
representada pela letra R e sua unidade de medida é Ohms (Ω - letra do alfabeto
grego).
Figura 1.7 – Resistência elétrica
Fonte: Markus, 2001, p. 25.
De acordo com Markus (2001), a segunda lei Ohms (Ω) estabelece que, a
relação entre a resistência do material varia conforme natureza de suas dimensões e
que, quanto à natureza, os materiais diferenciam-se por sua resistividade.
Salmeron (1962) explica que a eletricidade consiste em inúmeros elétrons que
circulam através de um condutor que por uma força conhecida por tensão, são
impulsionados. O nome dado ao movimento dos elétrons em um fio condutor é
chamado de corrente elétrica. A união desses dois fatores elétricos, a tensão e a
corrente elétrica formam um potencial que associado a uma diferença de potencial é
chamado de voltagem elétrica (V). A diferença de potencial é observada em suas
duas maneiras conhecidas, a corrente elétrica alternada e corrente elétrica continua.
Resistência elétrica é a oposição causada à passagem da corrente elétrica
em um fio condutor.
Quando um fio condutor oferece resistência à passagem da
34
corrente, os elétrons tendem a chegar do outro lado do fio condutor e essa
insistência dos elétrons gera calor. Esse calor por sua vez deve ser eliminado pelo
ambiente. (BOYLESTAD, 1998)
Um circuito só ira consumir eletricidade se ele estiver fechado, ou seja, com
uma carga (L1) ligada em um fornecimento de eletricidade (BAT1), no exemplo da
figura 1.8 apresenta um circuito sem consumo, pois ele esta com o interruptor
aberto.
Figura 1.8 – Circuito aberto
Fonte: Isis, 2010, adaptado pelo autor.
Markus (2001) afirma que, circuito aberto é quando o interruptor encontra-se
desligado não permitindo aos elétrons circularem de um pólo a outro da bateria, ou
seja, de um lado para outro.
Com isso, os elétrons existentes na bateria não
conseguem produzir trabalho e também não permitem à lâmpada acender. Na
situação da figura 1.9, o circuito encontra-se com o interruptor fechado possibilitando
que os elétrons circulem pelo circuito na direção da carga oposta.
Circuito fechado é a situação que o interruptor ligado permitindo aos elétrons
circularem de um pólo a outro da bateria. Essa circulação quando aplicada a uma
carga, por exemplo, a lâmpada (L1) do circuito da figura 1.9. A passagem da
corrente elétrica, como seu filamento é fabricado por um tipo de material com
resistência ôhmica diferente de zero, causando oposição a passagem da corrente
elétrica. Por haver diferença de potencial entre os dois pólos da lâmpada, a força de
atração dos íons dessa diferença de potencial tende a se encontrar produzindo calor
e luminosidade da lâmpada. (MARKUS, 2001)
35
Figura 1.9 – Circuito fechado
Fonte: Isis, 2010, adaptado pelo autor.
Segundo a lei de Ohm (Ω) essa relação pode ser entendida através da
seguinte relação representada por “RUI” figura 1.10.
Figura 1.10 – Representação RUI da lei de ohm
Fonte: Markus, 2001, adaptado pelo autor.
Matematicamente essa relação é escrita segundo Salmeron (1962), do
seguinte modo:
R=U/I
U=R.I
I=U/R
Um exemplo seria uma lâmpada ligada em uma tensão de 12 Volts (V) e seu
filamento com uma resistência de 12 Ohms (Ω). Conforme a lei Ohm, Quando uma
tensão circula em uma resistência, essa relação produz uma corrente (I). Corrente
que até então desconhecida nessa associação. Em um circuito, através desses dois
36
elementos pode ser calculado o valor da corrente que circula por essa lâmpada.
(BOYLESTAD, 1998)
Para um produto corrente a relação tensão pela resistência terá uma corrente
de
1 Ampère (A) que pode ser verificado na figura 1.11.
Figura 1.11 – Cálculo da corrente na lâmpada
Fonte: Isis, 2010, adaptado pelo autor.
Matematicamente a corrente que circula na lâmpada é calculada da seguinte
maneira, divide-se a tensão nela aplicada pela resistência de seu filamento.
Observa-se que a corrente elétrica (I) = Ampère (A).
Sendo que Ampère (A) é a unidade de medida da corrente elétrica (I).
Calcula-se:
I = U/R → I = 12/12 → I = 1 Ampère (A)
Para um elemento elétrico desconhecido, a possibilidade de achar o seu valor
sempre dependerá de outros dois elementos presentes no mesmo circuito.
1.6 POTÊNCIA ELÉTRICA (P)
Markus (2001) explica que, utilizando o mesmo circuito também pode ser
calculada a potência dissipado na lâmpada. Para isso deve-se saber que a potência
(P) é o efeito causado pelo trabalho de uma carga ligada a uma fonte de energia
elétrica. Esse trabalho gera calor (efeito Joule) e a luminosidade característica
principal em qualquer tipo de lâmpada. O produto potência (P) pode ser tirado da
relação de todos os fatores envolvidos na lei de Ohms.
Seguindo o raciocínio do autor, observa-se que a potência elétrica (P) = Watts
(W).
37
Onde Watts (W) é a unidade de medida da potência elétrica (P).
Por exemplo, para o circuito da figura 1.12 a potência (P) dissipada na
lâmpada pode ser calculada da seguinte forma:
Tem-se os valores da tensão de 12 Volts (V), corrente de 1 Ampère (A) e
resistência de 12 Ohms (Ω), calcula-se.
P = U.I → P = 12.1 → P = 12 Watts (W)
P = R.I² → P = 12.1² → P = 12 Watts (W)
A definição matemática da potência elétrica segundo a lei de Ohm calcula-se
da seguinte maneira:
P = U.I
P = R.I²
P = U²/R
As unidades de potência mais utilizadas são o Watts (W) e quilowatts (KW).
De acordo com o Sistema Internacional, a unidade de energia elétrica é o Joule (J)
que na prática é utilizada o quilowatt hora (kWh). Toda demanda de energia elétrica
consumida por residências é calculado através dessa unidade de medida. Quilowatt
hora é quanto um aparelho elétrico consome ligado durante uma hora. (MARKUS,
2001)
Para uma resistência (R) desconhecida, é necessário basicamente que os
valores tensão (U) e corrente (I) estejam presentes no circuito. Sendo a resistência
(R) o produto da divisão de tensão (U) pela corrente (I) na lâmpada tem-se ilustrado
conforme a figura 1.12.
Figura 1.12 – Cálculo da resistência na lâmpada
Fonte: Isis, 2010, adaptado pelo autor.
38
Resistência elétrica = Ohms (Ω).
Ohms é a unidade de medida da resistência elétrica (R) representada pela
letra Omega (Ω) do alfabeto grego.
R = U/I → R = 12/1 → R = 12 Ohms (Ω)
Conhecido o valor da corrente (I) e da resistência(R) é possível calcular o
valor da tensão de trabalho necessário para que a lâmpada forneça a potência
luminosa necessária conforme indicação do fabricante figura 1.13.
Figura 1.13 – Cálculo da tensão na lâmpada
Fonte: Isis, 2010, adaptado pelo autor.
A figura 1.13 mostra um circuito típico de uma bateria BAT1 alimentando uma
lâmpada L1. Perceba que o circuito encontra-se fechado, significando que há
circulação de corrente pela lâmpada L1. O circuito demonstra que a lâmpada L1
apresenta resistência de filamento de 12Ω e corrente circulado por ele de 1A, mas o
circuito esta faltando o valor da tensão fornecida pela bateria BAT1 e para que
segundo a lei de Ohms o valor da corrente e da resistência sejam verdadeiros faz
necessário resolver a seguinte equação matemática.
U = R.I → U = 12.1 → U = 12 Volts (V)
Na definição de potência elétrica (P), essa grandeza física é basicamente
idealizada da seguinte forma: o tempo é inversamente proporcional a potência
desenvolvida, ou seja, quanto menor o tempo a ser realizada certa tarefa, maior a
potência desenvolvida e vice-versa. (GASPAR, 2009)
Em termos matemáticos, a potência foi definida como uma proporção em que
o numerador é o trabalho (τ) e o denominador é o intervalo de tempo (∆t) realizado.
Portanto pode-se definir que potência é o trabalho realizado sendo seu valor afetado
39
diretamente ao tempo de execução. Se um mesmo trabalho for realizado em tempos
diferentes o numerador não altera. De outro lado quanto menor o denominador
maior o resultado da potência. Nessa realidade se um trabalho de 100 Joules é
realizado em 20 segundos tem-se que, na razão de 100/20 o trabalho foi
desenvolvido em 5 J/s. Caso o mesmo trabalho seja realizado em 5 segundos a
razão 100/5 é desenvolvido em 20 J/s. Essa teoria será aplicada na elaboração do
algoritmo de temporização que fará a fragmentação da potência elétrica instantânea
a ser acumulado pelo registrador de kWh. (GASPAR, 2009)
1.7 MAGNETISMO
Markus (2001) explica que o imã é um minério de ferro que tem a propriedade
de atrair outros pedaços de ferro. Devido à força de atração criada ao seu redor
chamada de campo magnético. O surgimento dessa força está relacionado a uma
diferença de potencial de seus pólos inseparáveis denominados norte e sul por estar
diretamente relacionado ao campo eletromagnético terrestre possuindo campo
eletromagnético permanente que tem a representação de linhas orientadas no
sentido do pólo norte para o sul.
Figura 1.14 – Sentido das linhas eletromagnéticas
Fonte: Markus, 2001, p. 99.
A figura 1.14 mostra um imã com duas divisões onde a parte branca na
esquerda apresenta material de pólo sul e a parte escura na direita de pólo norte e a
força desse campo magnético representado pelas linhas orientadas saído do pólo
norte em direção ao pólo sul.
Seguindo a mesma regra da lei de atração dos elétrons, Salmeron (1962)
também explica que os imãs possuem interação entre materiais de mesma
propriedade magnética sendo que seus pólos de mesma força, ou seja, iguais, se
repelem e os de força diferentes, se atraem. O raciocínio pode ser melhor
40
representado quando aplicados aos imãs perdurando os conforme a figura 1.15 a
seguir.
Conforme a representação da figura 1.15 quando colocado dois imãs em
posição oposta, ou seja, o lado norte de um com o lado sul do outro, nessa condição
acontecerá atração de ambos confirmando a teoria onde explica que as cargas de
valores diferentes se atraem. Na situação em que dois imãs fiquem próximos onde
cada imã esta apontando o mesmo pólo como no exemplo, o pólo norte de um com
o pólo norte do outro acontecerá sua rejeição, ou seja, as cargas de mesmo valor se
repelem como no exemplo anterior repulsão.
Figura 1.15 – Força de interação entre dois imãs
Fonte: Markus, 2001, p. 99.
Através de estudos e evolução desse fenômeno eletromagnético surgiram
outras duas grandezas básicas: fluxo magnético e indução magnética. (MARKUS,
2001)
Fluxo magnético são linhas ou conjunto delas de campo originadas do pólo
norte destinadas pela atração do pólo sul figura 1.16. (MARKUS, 2001)
Figura 1.16 – Fluxo magnético
Fonte: Markus, 2001, p. 99.
41
Indução magnética refere-se à medida da densidade de fluxo magnético, ou
melhor, medida da quantidade de linhas de campo que atravessam uma área
perpendicular a elas. (MARKUS, 2001)
1.8 ELETROMAGNETISMO
Nome sugestivo de vários estudos e experiências do fenômeno magnetismo
feito por diversos cientistas em uma descoberta muito notável. Descobriram que os
fenômenos elétricos e magnéticos atuam em conjunto. Esse estudo deu o nome de
eletromagnetismo. (MARKUS, 2001)
“Eletromagnetismo é a parte da Eletricidade que estuda certos fenômenos
nos quais intervêm corrente e campo magnético: podemos chamar a esses
fenômenos, fenômenos eletromagnéticos”. (SALMERON, 1962, p. 309)
1.9 CAMPO ELÉTRICO (B)
De acordo com Markus (2001), um fio condutor quando percorrido pela
corrente elétrica gera um campo elétrico ao seu redor. Esse campo quando colocada
uma bússola ao lado, por ser um instrumento muito sensível ao efeito
eletromagnético terrestre, é desorientado pelo campo magnético existente no fio
condutor. Esse efeito causado na bússola mostra que uma força magnética atua
através do fluxo de corrente mostrado na figura 1.17.
Figura 1.17 – Efeito do campo na bússola
Fonte: Markus, 2001, p. 100.
Seguindo o raciocínio de Markus (2001), a figura 1.17 anterior apresenta duas
bússolas onde cada uma está paralela a um fio condutor. No canto esquerdo da
figura 1.17 representa um fio condutor que não apresenta corrente elétrica
circulando por ele e o resultado é que não havendo circulação de corrente, não há
42
campo magnético e com isso a bússola não é influenciada. Já no canto direito da
figura
1.17
com
o
condutor
apresentando
circulação
de
corrente
e
conseqüentemente campo magnética, a bússola está fortemente influenciada por
este campo confirmando que há circulação de elétrons no fio condutor.
Figura 1.18 – Sentido do campo magnético no condutor
Fonte: Markus, 2001, p. 100.
O campo elétrico B no fio condutor figura 1.18, quando observada a corrente
elétrica (I) convencional entrando tem seu campo gerado no sentido horário.
(MARKUS, 2001)
1.10 CAMPO MAGNÉTICO
Markus (2001) explica que, quanto a um condutor parado, quando envolvido
por um campo magnético B constante não sofre nenhuma ação por ele figura 1.19.
Porém, caso esse mesmo fio condutor tenha movimento dentro deste campo
magnético B, por indução produzirá nele uma corrente (I) e uma tensão (V).
Figura 1.19 – Efeito do Campo sobre condutor em movimento
Fonte: Markus, 2001, p. 101.
43
“A corrente (i’) e a tensão induzidas são proporcionais à velocidade do
condutor, podendo ser detectadas por um instrumento de medida”. (MARKUS, 2001,
p. 101)
Figura 1.20 – Efeito do Condutor sobre campo variante
Fonte: Markus, 2001, p. 101.
De outra forma figura 1.20, se o fio condutor ficar parado e o campo
magnético B ser variável, o mesmo fenômeno de corrente e tensão surgirá no
condutor. Esse surgimento é fruto do campo magnético induzido no fio condutor.
Essa corrente e tensão induzida são proporcionais à variação do campo magnético,
podendo ser detectados por instrumento de medida apropriado. (MARKUS, 2001)
1.11 LEI DE LENZ
Segundo essa lei, o sentido da corrente elétrica (i’) induzida tem sentido tal
que produz outro campo magnético que se opõe à variação do campo magnético
produtor. Essa verificação pode ser observada colocando a face da espira de fio
circular próximo ao pólo norte de um imã figura 1.21. Na aproximação uma corrente
(i’) surgirá obtendo sentido tal também de pólo norte causando repelência do imã.
(MARKUS, 2001)
Figura 1. 21 – Efeitos de repulsão magnética
Fonte: Markus, 2001, p. 101.
Na figura 1.22, afastando o imã de pólo norte da face da espira de fio circular,
44
a corrente (i’) induzida adquire sentido tal surgindo um pólo sul, diferente do pólo
norte do imã causando sua atração. (MARKUS, 2001)
Figura 1.22 – Efeito de atração magnética
Fonte: Markus, 2001, p. 101.
Concluindo, o efeito da aproximação de um imã qualquer de uma espira de fio
circular quando na igualdade de pólos causa sua repelência e quando esse se
distancia invertendo o campo da espira, essa diferença de pólos causa atração do
imã. Esse fenômeno quando produzido de maneira continua, produzirá nas
extremidades da espira de fio uma corrente que ora circulará em um sentido, ora por
outro sentido da bobina por ação da inversão do campo magnético. (MARKUS,
2001)
1.12 ONDA ELETROMAGNÉTICA
Markus (2001) define também que, a corrente quando aplicada de forma
variante, produzirá também um campo elétrico variante. Esse campo elétrico quando
aplicado em uma espira de fio produz o fenômeno chamado campo eletromagnético.
Com a descoberta de que a corrente elétrica quando circulando em um fio condutor
produz um campo elétrico em seu redor e que variações dessa corrente produzem
um campo magnético que induzem variações de corrente num condutor. Portanto,
essa variação de campo elétrico produz variação de campo magnético que, por sua,
vez produz variação de campo elétrico formando o campo eletromagnético. Por
motivo óbvio essa conversão seqüencial de um campo ao outro gerando o campo
eletromagnético tem propriedade de se propagar pelo espaço na forma de onda
eletromagnética. Essa propagação favorece transmissões e recepções a distância
de sinais elétricos sem a utilização de fios conforme pode ser visto na figura 1.23.
Cientistas há centenas de anos chegaram à conclusão de que a onda
eletromagnética possibilitava a transmissão de sinais elétricos, e isso tornou
45
possíveis invenções de telégrafos sem fio e do rádio. Descobriram também que para
essa transmissão ser possível e eficaz, ou seja, a conversão de sinais elétricos em
onda eletromagnética era necessário uso de antenas. (MARKUS, 2001)
Figura 1.23 – Transmissão via satélite
Fonte: Markus, 2001, p. 101.
1.13 INDUTOR (BOBINA)
Indutor ou bobina é um dispositivo construído por um fio esmaltado enrolado
em volta de um núcleo figura 1.24. Seu símbolo pode variar conforme o tipo de
material constituído em seu núcleo. (MARKUS, 2001)
Figura 1.24 – Tipo de núcleo nos indutores
Fonte: Markus, 2001, p. 102.
O Funcionamento consiste em cada espira de fio que forma o indutor quando
circulando uma corrente elétrica gera um campo magnético. O sentido do campo
magnético segue a mesma regra da mão direita visto em eletromagnetismo. As
linhas de campo formado por cada uma das espiras se somam. Essa somatória é
concentrada formando o fluxo magnético ϕ (FI) figura 1.25. (MARKUS, 2001)
Segundo Markus (2001) explica que, indutores quando aplicados à
transmissão de sinais, na maioria das vezes, possuem seu núcleo a ar possibilitando
a dispersão do sinal elétrico. Quanto à necessidade é de transferência da corrente
elétrica entre dois indutores, utilizam-se como núcleo o ferro e ferrite reduzindo a
dispersão das linhas de campo. Por motivo este apresentar baixa resistência à
46
passagem do fluxo magnético. A utilização de indutores envolvidos em núcleos de
ferro, pelo sentido das linhas de campo, produz diferença de potencial magnético
deixando-o com um pólo norte e outro sul. Essa diferença é causada devido à
entrada do fluxo magnético determinando o pólo sul e sua saída o pólo norte pelo
indutor eletrificado. Essa composição do indutor envolvido em núcleo de ferro cria
um comportamento de um imã artificial atraindo materiais metálicos, surgindo um
novo componente, o eletroímã possibilitando avanços na tecnologia automática
como relés, contatores e outros que necessitavam de comandos eletromagnéticos.
Figura 1.25 – Fluxo magnético no indutor
Fonte: Markus, 2001, p. 102.
Polaridade magnética é quando um indutor for aplicado para trabalhar junto
ou próximo a outro indutor, a polaridade magnética deve ser conhecida. “Dois
indutores têm a mesma polaridade quando os seus fluxos magnéticos têm sentidos
iguais, e polaridades contrárias quando os seus fluxos magnéticos têm sentidos
diferentes”. (MARKUS, 2001, p.102)
Figura 1.26 – Indutância magnética
Fonte: Markus, 2001, p. 103.
Indutância (L) considerando um circuito onde um indutor é alimentado por
uma fonte de tensão (E) constante, ao fechar a chave S, em tempo (t) igual à zero
(t=0), surge uma corrente iL crescente figura 1.26. Confirmando que ao passar uma
corrente pela espira cria um campo magnético ao seu redor. Com linhas de campo
47
cortando as espiras posteriores induzindo uma corrente i’ que segundo a Lei de Lenz
confronta-se com a espira que a gerou. (MARKUS, 2001)
1.14 REATÂNCIA INDUTIVA XL (Ω)
Markus (2001) descreve que, reatância indutiva é a reação que um indutor
tem a passagem da corrente elétrica. Isto é, quando uma corrente aplicada em seus
terminais, pelo sentido da corrente que o circula ao passar pela primeira espira de fio
tende a reproduzir uma indução que atua sobre as seqüentes que responde a
produzirem uma nova corrente oposta sobre a que criou.
1.15 TRANSFORMADOR DE CORRENTE (TC)
SAELPA (2002), define que os transformadores de corrente são dispositivos
eletromagnéticos que permitem aos instrumentos de medição e proteção
trabalharem de forma adequada sem possuírem correntes nominais muito altas de
acordo com as correntes de carga do circuito que são aplicados. SAELPA (2002),
Alguns dos tipos de TC mais comuns em aplicações de medição e proteção serão
vistos a seguir:
O tipo enrolado, conforme a figura 1.27, é usado quando são requeridas
relações de transformações inferiores a 200/5. Possui isolação limitada e, portanto,
se aplica em circuitos até 15kV. Ocorre quando os enrolamentos primários,
constituídos de uma ou mais espiras, envolve mecanicamente o núcleo do
transformador. (SAELPA, 2002)
Figura 1.27 – TC tipo enrolado
Fonte: SAELPA, 2002, adaptado pelo autor.
48
O tipo barra, conforme a figura 1.28, é um transformador de corrente cujo
enrolamento primário é constituído por uma barra, montada permanentemente
através do núcleo do transformador. (SAELPA, 2002)
Figura 1.28 – TC tipo barra
Fonte: SAELPA, 2002, adaptado pelo autor.
O Tipo janela, conforme a figura 1.29, tem construção similar ao tipo bucha,
sendo que o meio isolante entre o primário e o secundário é o ar. O enrolamento
primário é os próprios condutores do circuito, que passa por dentro da janela.
(SAELPA, 2002)
Figura 1.29 – TC tipo janela
Fonte: SAELPA, 2002, adaptado pelo autor.
O Tipo núcleo dividido, conforme a figura 1.30, é um transformador de
corrente tipo janela em que parte do núcleo é separável ou basculante, para facilitar
o enlaçamento do condutor primário. (SAELPA, 2002)
49
Figura 1.30 – TC tipo núcleo dividido
Fonte: SAELPA, 2002.
Os transformadores de corrente são classificados em dois tipos de aplicação:
Aplicação em serviço de medição, utilizados para medição de
correntes em alta tensão, possuem características de boa precisão (ex:
0,3%-0,6% de erro de medição) e baixa corrente de saturação (quatro
vezes a corrente nominal).
Aplicação em serviço de proteção, utilizados para proteção de
circuitos de alta tensão, são caracterizados pela baixa precisão (ex:
10%-20% de erro de medição) e elevada corrente de saturação (da
ordem de 20 vezes a corrente nominal).
O TC que pode ser tanto para uso de medição quanto para uso em proteção
tem as seguintes características de corrente:
Correntes nominais primárias - devem ser compatíveis com a corrente de
carga do circuito primário.
Correntes nominais secundárias - são adotadas geralmente iguais a 5 A. Em
alguns casos especiais, quando os aparelhos, normalmente relés são instalados
distantes dos transformadores de corrente, pode-se adotar a corrente secundária de
1 A, a fim de reduzir a queda de tensão nos fios de interligação. (SAELPA, 2002)
1.16 MODERNOS SENSORES DE CORRENTE
O transformador de corrente (TC), mesmo com seu formato e construção
robusto, ainda é bastante utilizados em diversas áreas do setor industrial e
fornecimento de energia elétrica deixando a desejar apenas em aplicações que
atenda as definições da tecnologia moderna. A utilização de TC em aplicações cada
50
vez menores e digitais não teria menor compatibilidade. Junto ao avanço cada vez
maior, a tecnologia dos componentes semicondutores contribuiu para o crescimento
e melhoria dos sensores de corrente que antes era exclusivo do TC e que hoje é
também dos sensores de efeito Hall semicondutor. Um circuito integrado com
tecnologia dos semicondutores e utilizando o efeito Hall produz com mais
desempenho o nível de corrente proporcional a corrente lida por ele em sua entrada
além do seu tamanho reduzido. Com a modernização dos sensores de corrente,
esses podem ser ainda melhor aproveitados compatibilizando os atuais dispositivos
microprocessados. (SECON, 2012)
1.17 EFEITO HALL
Por volta de 1879, Edwin H. Hall durante experiências com objetivo de medir
o sinal dos portadores de carga diretamente, percebeu um fenômeno especial que
além de conhecerem na época que quando um fio condutor percorrido por corrente
elétrica e exposto a um campo magnético as cargas presente no condutor eram
condicionados a uma força que alterava seu movimento. O surgimento de uma
diferença de potencial no condutor surgindo um campo magnético perpendicular ao
campo gerador deu-se o nome de efeito Hall na forma de homenageá-lo.
(SOFISICA, 2012)
1.18 SENSORES DE CORRENTE POR EFEITO HALL
1.18.1 ACS 75x
O sensor ACS 75x é um componente eletrônico da família de sensores de
corrente desenvolvido pela Allegro MicroSystems. O ACS 75x é um componente
ideal em aplicações com corrente alternada e direta que precisa de medições de
corrente precisas típicas a controle de motores, gestão de consumo de eletricidade,
conversores de energia DC-DC e detecção de falhas de sobre correntes.
(ALLEGRO, 2012)
O funcionamento do ACS 75x consiste de precisão e baixo deslocamento por
efeito Hall. Uma corrente quando aplicada em seu terminal de entrada primário
51
formado por uma condução de cobre reforçado, parte superior de seu invólucro, gera
um campo magnético que é convertido pelo circuito integrado ACS 75x em uma
tensão proporcional. O sensor ACS 75x de efeito Hall pode ser visto na figura 1.31.
(ALLEGRO, 2012)
Segundo Allegro (2012), a utilização do ACS 75x em medições de corrente
elétrica residencial não causa percas e limitações no circuito devido à baixa
resistência entre seus terminais primários em torno de 100µΩ. A saída do ACS 75x
possui inclinação positiva (> VCC/2) quando um crescente fluxo de corrente
atravessa seus terminais 4 e 5 de entrada por onde recebe amostragem atual. O
funcionamento eficiente do ACS 75x em condições de sobre corrente se dá a
espessura do condutor de cobre, terminais de entrada primários.
Figura 1.31 – Invólucro de 5 pinos
Fonte: Allegro, 2012.
A seguir algumas das principais características e benefícios do ACS 75x:
Componente pequeno com facilidade de montagem e acomodação em placa de
circuito impresso (PCI); Baixíssimo ruído de funcionamento; Excelente isolamento
galvânico possibilitando aplicação em alta tensão; Baixa tensão (3 a 5.5v) e corrente
(10 a 13.5 mA) de alimentação; Baixo erro de resposta de saída; Tempo de subida
de saída de resposta em torno de 3 mS; Acoplamento primário bidirecional; A tensão
de saída proporcional à correntes AC ou DC; Saída extremamente estável
compensado por sua tensão de alimentação; Histerese magnética quase zero.
(ALLEGRO, 2012)
Uma breve ideia de aplicação do ACS 75x pode ser analisada na figura 1.32.
52
Figura 1.32 – Circuito típico de Aplicação
Fonte: Allegro, 2012.
Conforme a figura 1.32, o ACS 75x possui aplicação elétrica resumida. Na
conexão primaria, pinos 4 (IP+) e 5 (IP-), os pinos corresponde a conexão do circuito
elétrico a ser monitorado. A conexão secundário consiste em alimentar os pinos 1
(VCC) e o 2 (GND) com tensão estável que pode ser entre 3 a 5.5 volts. A saída do
sinal proporcional ao sinal de corrente em seu primário é conseguido no pino 3
(VIOUT). A figura 1.33 mostra os diagramas em bloco de seu funcionamento.
(ALLEGRO, 2012)
Figura 1.33 – Diagrama de blocos funcionais
Fonte: Allegro, 2012.
53
Outra característica importante do ACS 75x é sua disposição em Surface
Mounting Devices (SMD), ou seja, montagem em superfície que dispensa a
necessidade de furos facilitando sua montagem em superfície de placa para melhor
acomodação do componente conforme figura 1.34.
Figura 1.34 – Diagrama de pinos
Fonte: Allegro, 2012.
1.18.2 ACS709
Figura 1.35 – ACS709 montado em superfície
Fonte: Allegro, 2012.
Outro componente muito interessante na aplicação de medições de corrente
elétrica
é
o
ACS709.
Desenvolvido
pela
Allegro
MicroSystems
possuem
características bastante satisfatório quando o fator mais importante é o baixo nível
de erro em torno de 2% sobre temperatura ambiente. O sensor de efeito hall
54
ACS709 esta montado sobre uma superficie com dois orificios facilitando a conexão
dos fios através de conectores arruelas. O farmato e disposição dos componentes
que fazem parte da placa esta disponível conforme mostra a figura 1.35. (ALLEGRO,
2012)
O circuito da figura 1.36 explana as disposições dos componentes no circuito
elétrico facilitando seu entendimento. O ACS709 possui entrada de corrente primaria
formada pelos pinos de 1 a 12 que fazem ligação nas trilhas de maior espessura
com os orifícios de fixação dos fios da instalação elétrica a ser mensurada.
Figura 1.36 – Esquema do ACS709
Fonte: Allegro, 2012.
A utilização do ACS709 é resumida podendo ser utilizado com qualquer tipo
de microcontrolador. No geral suas principais características técnicas são: Acuidade
melhorada de corrente entre -37,5 e 37,5A; Sensibilidade linear de corrente entre -75
a 75A; Resistência típica de 1,1MΩ; Placa de circuito impresso com trilhas de cobre
de 0,07mm dissipando o mínimo de energia possível. Blindagem integrada
reduzindo interferências capacitivas entre o condutor de corrente e o substrato da
placa; Isolamento elétrico entre a corrente primaria e a saída integrada de 2,1KV
RMS; Temperatura operacional de grau automotivo; Largura de banda de frequência
na ordem de 120 kHz, podendo ser opcional diminuindo o capacitor no pino marcado
por “FILT”. (ALLEGRO, 2012)
55
1.19 MEDIDOR DE ENERGIA ELÉTRICA CONVENCIONAL
Os
medidores
de
energia
elétrica
são
maquinas
eletromecânicas
desenvolvidas e dedicadas à medição de consumo de energia elétrica com unidade
de medida mais utilizado o kWh. Os medidores convencionais são normalmente
instalados junto ao padrão de entrada de fornecimento de energia. (LIMA, 2007)
Figura 1.37 – Lâmpada-hora de Samuel Gardiner
Fonte: Lima, 2007.
A companhia responsável pela concessão regional tem como compromisso
instalar os medidores nos padrões de entrada e prezar pela qualidade do serviço
prestado e cobrar pelo consumo registrado pelos medidores, de forma a compensar
todo o conjunto de operações envolvido desde sua geração até o consumidor final
que pode ser residencial, comercial ou industrial. (LIMA, 2007)
Presentes na maioria das casas, os medidores de energia elétrica são ligados
entre a rede de fornecimento e a casa que possui um circuito distribuído por cargas
a serem alimentadas. Inventado e patenteado no ano de 1872 por Samuel Gardiner
o primeiro medidor quantificador de energia elétrica conforme a figura 1.37. Sua
especificação era a medição de lâmpada-hora para aplicação em corrente continua
56
que registrava o período que uma lâmpada ficava acesa. (LIMA, 2007)
Mais tarde em 1878 J.B. Fuller desenvolveu um medidor de lâmpada-hora
para aplicação em corrente alternada. Possuía uma maquina parecida com um
relógio que acionado por bobinas vibrando em freqüência de alimentação, nessa
condição acionava o mecanismo causando o avanço da contagem, esse tipo de
medidor pode ser apreciado na figura 1.38. (LIMA, 2007)
Figura 1.38 – Medidor de Lâmpada-Hora de 1878, J.B. Fuller
Fonte: Lima, 2007.
Figura 1.39 – Medidor químico de energia de Edison
Fonte: Lima, 2007.
Como os medidores de lâmpada-hora não apresentavam eficiência em
medições de cargas desconhecidas devido variações ao decorrer do tempo, ou seja,
para que a medição fosse eficaz era preciso conhecer a carga, por exemplo,
potência da lâmpada usada como carga consumidora. Na busca de tornar eficaz
medição desconhecidas durante mudanças potenciais ligados como carga, Edson
(1878 e 1880) construiu o primeiro medidor quantitativo de eletricidade. Com a nova
57
invenção, ao contrário do medidor lâmpada-hora que registrava a quantidade de
horas que a carga ficou ligado, o registrador quantitativo baseado em composição
química possibilitava quantificar a energia consumida em diferentes cargas e sua
representação pode ser observada na figura 1.39. (LIMA, 2007)
1.20 MEDIDORES ATUAIS DE QUILO WATT – HORA
Figura 1.40 – Medidor da Westinghouse Electric Corporation
Fonte: Lima, 2007.
Os medidores de quilowatt-hora são equipamentos mecânicos que colocados
na entrada de fornecimento de energia elétrica de casas, comércios e indústrias
registram, ou melhor, quantificam a potência elétrica consumida por aparelhos
daquela unidade consumidora. Seu mecanismo é formado por eixo e engrenagens
que giram sobre ação do campo magnético formado pela corrente elétrica em
movimento de acordo com a necessidade da carga utilizado no momento. A corrente
quando em circulação por uma bobina de acordo com sua intensidade, cria um
campo elétrico de força diretamente proporcional a essa intensidade fazendo com
que o eixo que recebe o disco sensível a esse campo movimentar a uma velocidade
conforme a intensidade dessa corrente. O eixo principal por sua vez gira uma
58
sequência de engrenagens onde cada seguimento de eixo esta conectado a um
ponteiro igual à de um relógio analógico.
A quantidade de giro esta diretamente
ligada à energia consumida por uma carga durante certo intervalo de tempo e essa
medida é dada em quilowatt-hora (kWh). Normalmente a instalação e inspeção
desses equipamentos são de responsabilidade das concessionárias local. (LIMA,
2007)
O giro ou avanço do ponteiro é dado por todos os kWh consumido, ou seja, a
companhia cobra apenas pelo consumo inteiro da energia consumida, portanto a
fração de consumo não debitado na conta atual, por exemplo, será completado
adiante e somado a próxima fatura não tendo perca, sendo que o registro por esses
medidores são progressivos. O tipo de medidor antigo de ponteiro e que ainda
funciona em algumas residências, pode ser visto conforme figura 1.40. (LIMA, 2007)
Segundo Lima (2007), os medidores eletromecânicos possuem as seguintes
características de trabalho:
Principio básico de funcionamento é por indução;
Classe 2.0 para faturamento de consumo;
Erro Máximo de 2% do valor indicado para sua faixa nominal de
operação;
Interferência na operação na presença de corrente continua;
Precisão variável conforme a condição de operação;
Sensibilidade mecânica.
Em meados de 1892, os primeiros medidores de watt-hora com precisão
suficiente para aplicação em medições de energia consumida foi desenvolvidos por
Thomas Duncan e eram monofásicos que logo foram melhorados para circuitos
bifásicos e trifásicos. (LIMA, 2007)
1.21 MODERNOS MEDIDORES DIGITAIS
Os medidores analógicos ainda estão presentes na maioria das residências e
comércios. Independente da condição social os medidores eletromecânicos
tornaram possível à quantificação da energia consumida durante muitos anos e com
o avanço da tecnologia em geral, no caso dos medidores de energia elétrica teve
seu crescimento evolutivo bastante significativo. Com o passar dos anos em
59
diferentes épocas os materiais obtiveram seu valor e como a ciência cada vez mais
se preocupando com o que há em sua volta buscou avanços e preservação ao meio
ambiente. O processo evolutivo buscou melhorias em diversidades tecnológicas,
assim, como os medidores digitais que trouxe junto com a evolução da eletrônica
aliada a informática, modernidade, clareza e desempenho de medições precisas
com tamanho reduzido. (LIMA, 2007)
Figura 1.41 – Medidor eletrônico monofásico de aplicação residencial
Fonte: Lima, 2007.
Surgiram então os medidores digitais conforme pode ser visto na figura 1.41,
diferentemente dos conhecidos medidores eletromecânicos, são maquinas com
precisão mais afinada. Constituídas em sua maioria a trabalhar em escala de leitura
de classe 0,8 e admite comercialmente classe de 1%. Com a ausência de partes
mecânicas para capitação do fluxo de corrente em um circuito alimentador, a
substituição desses elementos mecânicos por eletrônicos possibilitaram precisão
mais elevada através de sensores elétricos sensíveis a um fluxo menor de corrente,
são também mais resistentes a vibrações, porem a utilização de circuitos digitais
está sujeito a interferências eletromagnéticas. (LIMA, 2007)
Como qualquer equipamento de medição, os medidores eletrônicos estão
60
sujeito a limitações. Devido ao emprego de componentes semicondutores e outros
com tecnologias digitais com menos tolerância a ruídos e frequências de
interferência. Também outra possibilidade e uma preocupação seriam em sua
fragilidade na ocasião de surtos causados por problemas de queda ou cruzamento
entre linhas de transmissão de eletricidade. (LIMA, 2007)
1.22 PROPOSTA DE TRABALHO
A tecnologia digital evoluiu para que novas tecnologias a partir dela
ganhassem cada vez mais o mercado brasileiro. A informática foi favorável ao
desenvolvimento de processos digitais complexos e também para a evolução das
tecnologias de medidores de energia elétrica em geral. Com o crescente interesse
por medidores digitais, favorece cada vez mais estudos sobre esse tipo de
tecnologias em faculdades de engenharia e de tecnologias no Brasil. (LIMA, 2007)
As vantagens são inúmeras em relação aos medidores eletromecânicos. Além
da função principal de acumular o kWh, os medidores digitais possibilitam também a
comunicação com outros dispositivos externos trocando ou fornecendo dados entre
aplicativos de gerenciamento de energia elétrica ao mesmo tempo em que operam
como registradores de consumo para o faturamento pela concessionária. Outra
possibilidade seria sua utilização em distâncias em que há extrema necessidade de
monitoramento, sendo por comunicação via internet ou rádio. (LIMA, 2007)
Com o método de medição de energia elétrica existente fica difícil prever o
valor da conta a ser pago. Para o consumidor de energia residencial em geral não
existe por enquanto no mercado recursos que trata de maneira prática e legível o
consumo de eletricidade. (LIMA, 2007)
Em proposta a esta realidade seria a criação de um protótipo utilizando
Microcontrolador Aplicado no Monitoramento e Consumo de Energia Elétrica
(MAMCEE), um equipamento capaz de mensurar instantaneamente o consumo de
energia elétrica em valores monetários a ser pago.
61
2 CONCEITOS BÁSICOS DE ELETRÔNICA
A eletrônica é uma área muito extensa e seria impossível comenta-lá
totalmente sem esquecer algum item, por esse motivo neste capítulo serão
abordados
somente
os
componentes
semicondutores
envolvidos
no
desenvolvimento de hardware do projeto MAMCEE.
Torres (2002) define que no conceito geral a eletrônica é a ciência que estuda
a forma de controlar a corrente elétrica por meios elétricos no qual os elétrons têm
papel fundamental. Na eletrônica analógica compreende-se que dentro de uma
determinada escala de tensão podem existir infinitos valores elétricos. Por exemplo,
dentro da escala de 1 Volt à 2 Volts existem N valores como 1V, 1.2V,
1.3V...1.898777V até 2V, ilustrado pela figura 2.1.
Figura 2.1 – Representação gráfica da eletrônica analógica
Fonte: Elaborado pelo autor, 2011.
2.1 SEMICONDUTORES
Segundo Bertoli (2000), semicondutores são materiais que apresentam
resistividade elétrica intermediária, posicionam-se entre os condutores que
apresentam boa condução elétrica e os isolantes que são péssimos condutores de
eletricidade. Esse material possibilitou que a corrente elétrica fosse controlada e deu
origem à ciência eletrônica.
Bertoli (2000) explica que o átomo de germânio e o átomo de silício são bem
parecidos, foram os átomos que mais deram certo no avanço da tecnologia
62
eletrônica por possuírem camadas de valência com quatro elétrons que agrupados
entre si formam uma estrutura cristalina, conforme figura 2.2. Sua substância possui
átomos que formam uma estrutura que se posicionam de maneira ordenada no
espaço.
Figura 2.2 – Átomos de silício ou germânio
Fonte: Bertoli, 2000, p.5.
Nesta estrutura cada átomo une-se a quatro outros átomos vizinhos por meio de
ligações covalentes. Cada um dos quatros elétrons de Valência de um átomo é
compartilhado com outro vizinho, fazendo com que dois átomos adjacentes
compartilhem os dois elétrons, a figura 2.3 ilustra o processo.
Figura 2.3 – Elétrons livres
Fonte: Bertoli, 2000, p.5.
63
2.2 DIODO
O diodo é um componente que tem a característica de uma válvula
direcional. O diodo mais comum possui dois terminais onde um terminal esta ligada
a camada positiva (P) e o outro terminal à camada negativa (N), isso forma uma
junção (PN), ilustrado pela figura 2.4. (BERTOLI, 2000)
Figura 2.4 – Junção PN de um diodo
Fonte: Bertoli, 2000, adaptado pelo autor.
Segundo Bertoli (2000) a funcionalidade do diodo compara-se a uma válvula
direcional uma vez que permitem aos elétrons circularem apenas em uma direção.
Essa funcionalidade prove da repulsão recíproca dos elétrons livres do lado negativo
(N) que dispersa em todas as direções. Parte desses elétrons fura a junção
ocupando os espaços deixados pelas lacunas. Quando ocorre a ocupação de
lacunas por elétrons livres, as lacunas deixam de existir o que torna negativamente
carregado, desta forma surge um íon negativo. (BERTOLI, 2000)
Figura 2.5 – Camada de depleção da junção
Fonte: Bertoli, 2000, adaptado pelo autor.
Bertoli (2000) explica que a passagem dos elétrons pela junção cria um par
de íons fixo na estrutura do cristal por meio da ligação covalente. No aumento dos
64
íons a região próxima a junção fica carente de elétrons livres e lacunas o que
constitui a camada de depleção, ilustrado pela figura 2.5. Essa camada age como
barreira impedindo que aumente a difusão dos elétrons livres. A camada de
depleção conhecida como barreira de potencial possui barreira de potencial de 0,7
Volts para junção formada por cristal de silício e 0,3 Volts para junção formada por
cristal de germano.
Segundo Bertoli (2000), o diodo é um componente semicondutor bastante
simples por possuir uma junção com apenas duas camadas N e P torna-o bastante
compreensível seu funcionamento. A figura 2.6 ilustra o símbolo de um diodo que é
parecido com uma seta acrescido de uma barra vertical na ponta, representa o
sentido da tensão positiva em um circuito eletrônico. Além do mais, um diodo
proporciona desde seu surgimento até os dias de hoje importante função em
circuitos eletrônicos e que sem essa função seria impossível aproveitar correntes
alternadas para alimentação dos circuitos eletrônicos, conhecido como retificação.
Figura 2.6 – Símbolo do diodo
Fonte: Bertoli, 2000, p.7.
O diodo tem a propriedade de conduzir corrente elétrica apenas em um
sentido, essa propriedade permite que, aplicando-os de maneira adequada em
circuitos alimentados por corrente alternada (CA) torne a mesma em corrente
continua (CC) necessária aos componentes semicondutores (BERTOLI, 2000).
Bertoli (2000) afirma que, quando não possuímos correntes continua de boa
qualidade, por exemplo, de baterias ou acumuladores de corrente elétrica para
alimentar um circuito eletrônico, ou seja, há somente a corrente alternada da rede
(110/220 V) há necessidade de transformá-la, para que isso torne possível, é preciso
aplicar diodos retificadores a fim de separar os ciclos positivos dos negativos.
2.2.1 Diodos retificadores
Segundo Bertoli (2000) os diodos retificadores como o próprio nome diz,
65
servem para retificar correntes que por sua vez possuem variações impróprias para
aplicação em componentes semicondutores, caso aplicado sem o uso desses diodos
causaria danos funcionais, até mesmo sua queima. Diodos retificadores são
aplicados em fontes de alimentação ligadas em correntes alternadas. As correntes
alternadas são formadas por dois ciclos de corrente, o ciclo positivo e o ciclo
negativo. Essa composição é proveniente de sua fonte geradora, o gerador elétrico,
que utiliza de forças mecânicas diversas como água corrente, ventos e outros meios.
Um gerador é muito parecido com um motor elétrico, possui um eixo e uma estrutura
para sustentar e também componentes agregados a geração da eletricidade como
bobinas de fios e imãs que formam campos magnéticos que influenciarão na
geração de eletricidade.
Essa formação de corrente elétrica em ciclos periódicos sucessivos (CA) é
devida ao eixo do gerador, peça fundamental que gira em torno de si e produz
defasagem de 90º graus a partir de um ponto inicial até um ponto final, com
repetição enquanto o eixo estiver em movimento (BERTOLI, 2000).
A corrente elétrica alternada possui variações de corrente em ciclos positivos
e negativos. Os ciclos positivos quando aplicado os diodos retificadores no sentido
de anodo para catodo conforme pode ser visto na configuração da figura 2.7,
formam o pólo positivo da tensão (+V) com certa diferença de potencial elétrico em
relação ao pólo negativo (0V) conhecido internacionalmente por ground (GND). Já
os ciclos negativos quando aplicados os diodos retificadores no sentido de catodo
para anodo conforme pode ser visto na configuração da figura 2.8, formam o pólo
negativo da tensão (-V) de certa diferença de potencial elétrico com relação ao pólo
de sua referencia elétrica GND. (BERTOLI, 2000)
Figura 2.7 – Diodo ceifador do ciclo negativo
Fonte: Isis, 2010, adaptado pelo autor.
66
No circuito da figura 2.7 o diodo D1 está posicionado de maneira que os ciclos
positivos e negativos aplicados em seu anodo sejam selecionados quando no seu
tempo de condução permita passar os ciclos positivos e no tempo de corte ignora os
ciclos negativos. Nessa configuração um diodo permite a utilização dos ciclos
selecionados nesse caso os positivos a serem aplicados na formação da diferença
de potencial com valor positivo em relação a sua referência GND. (BERTOLI, 2000)
Figura 2.8 – Diodo ceifador do ciclo positivo
Fonte: Isis, 2010, adaptado pelo autor.
Na configuração do circuito da figura 2.8 o diodo esta posicionada de maneira
que os ciclos positivos sejam ignorados e deixando conduzir os ciclos negativos para
formarem uma diferença de potencial de tensão negativa em relação ao GND.
2.2.2 Diodo zener
O diodo zener é um tipo de componente semicondutor que tem a capacidade
de regular tensão positiva monitorada por seu catodo ou tensão negativa por seu
anodo. Sua aparência física é como do diodo e tem em seu corpo a tensão
reguladora, possui também faixa para facilitar a identificação do catodo. Quando
aplicados em polarização reversa, ou seja, seu catodo no positivo e anodo no
negativo, haverá condução quando a tensão atingir valor especificado de trabalho
(TORRES, 2002).
A figura 2.9 apresenta uma configuração típica de regulador de tensão que
utiliza diodo zener (D1) e resistor (R1). Neste tipo de configuração a corrente
67
máxima fornecida por esta fonte fica limitada pelo resistor (R1) empregado em série
com o diodo zener (D1). Possuem diversos tipos de diodos zener no mercado como,
por exemplo, os diodos de 400 mili Watts e 1 Watt. O valor de corrente máximo
admissível é diretamente relacionado a potência e a tensão de trabalho do diodo
zener. A associação do diodo zener e do resistor em série sempre haverá pela
limitação da corrente no zener, que sem o resistor limitador, com aplicação de
tensões maiores que a tensão de corte causa a condução imediata do zener e a
queima do mesmo (TORRES, 2002).
Figura 2.9 – Regulador de tensão por diodo zener
Fonte: Isis, 2010.
2.2.3 Foto diodo
Figura 2.10 – Foto - diodo e símbolo
Fonte: Isis, 2010, adaptado pelo autor.
Os fotodiodos são componentes com capacidade de enxergar variações
luminosas. Possui estrutura transparente e reversamente polarizada sensível à luz
conforme pode ser observado na figura 2.10. Os fotodiodos quando submetidos ha
68
certa quantidade de luz, sua corrente reversa varia conforme a intensidade luminosa,
ou seja, quanto maior a intensidade luminosa, maior será a intensidade da corrente
reversa. (TORRES, 2002)
2.2.4 Diodo emissor de luz
O diodo emissor de luz, também conhecido como Ligth Emitting Diode (LED),
é um diodo que quando polarizado diretamente emite luz. O LED é um tipo de
lâmpada em estado sólido que ao contrario de uma lâmpada comum de vidro se cair
no chão quebra. O problema do LED é a sua limitação de corrente e a voltagem
baixíssima, a tensão de um LED gira em torno de 2 Volts e corrente de consumo em
10 ma. O símbolo de um LED pode ser verificado na figura 2.11. (TORRES, 2002)
Figura 2.11 – LED e simbologia
Fonte: Isis, 2010, adaptado pelo autor.
2.3 TRANSISTOR
Os transistores são componentes que tiveram um papel muito importante na
eletrônica analógica e que através dessa fantástica combinação de silício com
inspiração dos diodos deram mais vidas e proporcionaram com grande classe os
primeiros passos da eletrônica digital. As primeiras experiências na eletrônica digital
foram feitas com os transistores, os pesquisadores puderam também desenvolver a
partir deles testes com portas lógicas e avançar com a tecnologia digital
proporcionando perspectivas futuras a uma tecnologia que deu vida aos
computadores. (BERTOLI, 2000)
Podemos dizer que um transistor é uma associação de dois diodos colocados
de maneira polarizada e formando dois tipos conhecidos: os PNP e os NPN,
ilustrados pelas figuras 2.12 e 2.13.
69
Figura 2.12 – Transistor PNP genérico
Fonte: Isis, 2010, adaptado pelo autor.
Na figura 2.12 anterior os diodos estão colocados de maneira que os anodos
fiquem na extremidade representando o emissor e o coletor do transistor e a base
representada pela união dos catodos.
Figura 2.13 – Transistor NPN genérico
Fonte: Isis, 2010, adaptado pelo autor.
A figura 2.13 representa os catodos (k) dos diodos que formam extremidades
do emissor (e) e coletor (c) do transistor e sua base (b) é formada pela união dos
anodos (A).
A utilização dos transistores proporcionou um grande passo na eletrônica
substituindo suas antecessoras válvulas que eram grandes demais. Com sua
diminuição, os transistores possibilitaram que a eletrônica e seus derivados tivessem
tamanhos cada vez menores, com isso, possibilitou melhor mobilidade as novas
gerações de equipamentos. (BERTOLI, 2000)
Os transistores podem ser usados de diversas maneiras, por exemplo, chave,
detecção, amplificação, oscilação, misturador, entre outros. Uma maneira mais
70
simples de um transistor ser aplicado é como uma chave onde assume dois estados,
aberto ou fechado. O estado aberto é quando o mesmo não possui polarização
nenhuma e fechado é quando este estiver polarizado.
A polarização de um
transistor simples segue a mesma regra de um diodo e assume no inicio de
polarização devido o material usado 0,7 V para sua junção. Sua junção acontece
entre o terminal coletor e emissor controlados pela sua base. Sua base funciona
como a manopla de uma torneira, o emissor como entrada de água e o coletor como
a saída. (BERTOLI, 2000)
2.4 RESISTOR
Figura 2.14 – Símbolos de um resistor
Fonte: Isis, 2010, adaptado pelo autor.
Diante da evolução eletrônica e com a necessidade de limitar correntes nos
circuitos eletrônicos para que os componentes funcionassem, os resistores foram a
grande sacada na solução do problema. No inicio os resistores eram fabricados com
material condutor ou cromo e sua resistência elétrica aumentava conforme o
comprimento desse fio, entretanto, para obter certas resistências de valores muito
altos, como mil a milhões de Ohms, essa construção tornava muito robusta. Com a
evolução, houve a necessidade de diminuir seus componentes. Para resolver este
problema descobriram matérias que proporcionavam o mesmo resultado em
tamanhos menores, são fabricados com materiais de carbono para pequenas
potencias de dissipação e alto valor ôhmico para suportarem altas potencia e grande
quantidade de temperatura. (TORRES, 2002)
A figura 2.14 apresenta dois tipos de símbolos mais usados em esquemas.
Segundo Torres (2002) os resistores são classificados pelo o tipo de material
fabricado.
71
Figura 2.15 – Resistor e sua simbologia
Fonte: Isis, 2010, adaptado pelo autor.
O valor do resistor normalmente é colocado em forma de listas de cores
conforme pode ser visto na figura 2.15. A potência dos resistores determina sua
capacidade de suportar alto fluxo de elétrons que passa por ele. Quando esse fluxo
circula pelos resistores tende a gerar calor que quando não suportados por eles
causam sua queima. (TORRES, 2002)
2.5 CAPACITORES E CONDENSADORES
Os capacitores são componentes com capacidade de armazenar cargas
elétricas
e
consequentemente
energia
estática,
chamados
também
de
condensadores são constituídos de duas peças condutoras chamadas de armadura.
Entre essas armaduras existe um material chamado dielétrico, substância isolante
de alta resistência ao fluxo de corrente elétrica. (TORRES, 2002)
Figura 2.16 – Capacitor cerâmico e simbologia
Fonte: Isis, 2010, adaptado pelo autor.
Os condensadores são utilizados nos mais diversos circuitos elétricos, de
formato cilíndrico ou plano, são responsáveis em manter estáveis correntes em
fontes de alimentação a partir da rede elétrica alternada. São usados também para
72
corrigir variações causadas por certos componentes eletrônicos e os dois tipos mais
usados podem ser visto na figura 2.16 e 2.17, os tipos de capacitores cerâmicos e
eletrolíticos em sua forma física e esquemática. (TORRES, 2002)
Figura 2.17 – Capacitor eletrolítico e simbologia
Fonte: Isis, 2010, adaptado pelo autor.
2.6 CONECTOR E BORNE
São dispositivos de conexão que traz facilidade na fixação e remoção através
de cabos de partes de um circuito e componente relacionado figura 2.18. Os fios
externos nele conectados são fixados por parafusos no conector que apertando ou
desapertando para soltar as fiações.
Figura 2.18 – Conector borne e simbologia
Fonte: Isis, 2010, adaptado pelo autor.
2.7 CRISTAL DE QUARTZO
Componente fabricado a base de quartzo com o propósito de oscilar em uma
determinada frequência. A frequência é produzida pela ressonância do quartzo em
vibração com bastante precisão. Essa frequência produzida pelos cristais é utilizada
na medição de tempo, são muito utilizados em relógios e também para estabilização
de frequências de transmissão de rádios.
73
Figura 2.19 – Cristal de quartzo e simbologia
Fonte: ISIS, 2010, adaptado pelo autor.
O funcionamento básico dos cristais de quartzo é que quando seus dois
terminais internamente ligados a um cristal piezelétrico, esse cristal quando
submetido sobre certa tensão em torno de dois volts tende a contrair com tempo de
duração conforme sua construção. Após certo tempo a contração libera a tensão
relaxando o cristal de quartzo, iniciando um novo ciclo até que a alimentação do
circuito que ele esta submetido seja cortado. O ciclo traçado pela contração e
relaxamento determina a frequência de oscilação ou operação. Os cristais de
quartzo por possuírem frequências estáveis e controláveis são muito utilizados por
microcontroladores. A imagem física de um cristal de quartzo pode ser observada na
figura 2.19.
2.8 CHAVE (PUSH BUTTON)
Figura 2.20 – Chave button e simbologia
Fonte: ISIS, 2010, adaptado pelo autor.
São dispositivos de contato de duas ou quatro penas de conexão apropriados
para soldagem no próprio PCI. Ideais para construção de teclado matricial acoplado
no próprio circuito impresso de forma a economizar espaço. A figura 2.20 apresenta
uma chave push button de posição vertical de quatro pernas para soldagem em PCI.
74
2.9 BUZZER OU CIGARRA
Um projeto bem elaborado, além dos recursos de apresentação dos dados
processados e tratados visualmente, outra forma necessária seria, por exemplo, em
um equipamento que atenda através de recursos audíveis para deficiente visual
seria o uso de um dispositivo que emite ruídos audíveis quando alimentados.
Quando trabalhamos com desenvolvimento de dispositivos microcontrolados
precisamos conhecer para que tipo de cliente esteja a desenvolver. Uma solução
bastante comum seria o uso de dispositivos de emissão de áudio como as cigarras
que emite certa frequência de áudio para alertar o usuário do equipamento figura
2.21.
Figura 2.21 – Cigarra e simbologia
Fonte: ISIS, 2010, adaptado pelo autor.
Com a utilização da cigarra no MAMCEE torna possível emitir sinais de avisos
em determinada frequência diferente para cada tipo de serviço. Os casos de
aplicação com bip mais evidente para o MAMCEE seriam: Aviso de inicialização do
sistema; Aviso de erro na comunicação com dispositivos externos; aviso de
irregularidade no nível de tensão; aviso de sobrecarga de corrente; aviso de
memória cheia. (ISIS, 2010)
2.10 CONTROLADOR HD47780
O display de cristal liquido em inglês liquid crystal display (LCD), alfanumérico
HD47780 é bastante eficiente na utilização com dispositivos embarcados. Possuem
75
grande variedade de configurações desde uma linha de oito caracteres (8x1), 16x2,
20x4. Uma controladora HD47780 controla até 80 caracteres. Displays com
caracteres maiores são necessários utilizar mais de um controlador HD47780. O
LCD pode vir com ou sem luz de fundo e possuem um padrão de 14 pinos para os
LCD sem luz de fundo e 16 pinos para os que possuem luz de fundo. A configuração
dos pinos do LCD é conforme a tabela 2.1. (ISIS, 2010)
Conforme a IDE ISIS (2010), o LCD 20x4 é denominado em sua biblioteca de
componentes por LM044L e possui as seguintes características técnicas: Capaz de
gerar 208 diferentes tipos de caracteres padrão conforme a tabela ASCII;
Capacidade de mostrar 80 caracteres visíveis simultaneamente durante o
funcionamento; Barramento de dados de oito bits; Permite operação no modo de 4
bits ou 8 bits; A tensão nominal do back light é por volta de 4,2V a 25˚C, utilizando
uma alimentação VDD de 5 V.
Quadro 2.1 – Configuração dos pinos LCD HD47780
Pino
Função
Descrição
1
Alimentação
Terra ou GND
2
3
4
5
6
7
8
9
10
11
12
13
14
Alimentação
0V
RS Seleção:
R/W Seleção
E Chip select
B0 LSB
B1
B2
B3
B4
B5
B6
B7 MSB
VCC ou + 5 V
Tensão para ajuste de contraste
1 - Dado, 0 - Instrução.
1 - Leitura, 0 - Escrita.
1 ou 0, 1 - Habilita, 0 - Desabilita
15
16
A
K
Barramento
De
Dados
Anodo p/ LED back light
Catodo p/ LED back light
Fonte: Isis, 2010, adaptado pelo autor.
A figura 2.22 mostra a imagem real do LCD e a simbologia com a disposição
dos terminais de ligação.
76
Figura 2.22 – Display LCD e simbologia
Fonte: Isis, 2010, adaptado pelo autor.
2.11 MAX232
O MAX232 é um controlador bidirecional serial com velocidade de até 120 K
bits/s e a sua utilização fazem necessário pela diferença de níveis existente entre as
tecnologias TTL e RS232. (ISIS, 2010)
A imagem do componente MAX232 e sua simbologia no Isis é mostrada na
figura 2.23.
Figura 2.23 – MAX232 e simbologia
Fonte: Isis, 2010, adaptado pelo autor.
77
2.12 CONECTOR DB9
Figura 2.24 – Conector DB9 e simbologia
Fonte: Isis, 2010, adaptado pelo autor.
O conector DB9 é um tipo comum de conector que foi muito utilizado em
computadores e que hoje substituídos pelos conectores USB, faziam conexão de
mouse e teclados na CPU dos computadores. Os conectores DB9 figura 2.24,
recebe este nome por possuírem nove pinos de conexão em uma forma de trapézio,
eram conhecidos por porta serial pela característica de comunicação em serie, ou
seja, os bits eram enviados em fileira um a um. Ainda hoje em dia são bastante
utilizados na comunicação entre os microcontroladores e os computadores na troca
de informação e os protocolos mais utilizados para esse tipo de comunicação são
RS232 e RS485. (ISIS, 2010)
2.13 EEPROM
A memória 24LC512 é um Circuito integrado desenvolvido com tecnologia
não volátil na qual pode ser programada e apagada eletricamente muitas vezes. A
memória 24LC512 ou similares é normalmente empregada nos projetos com
microcontrolador. O PIC possui uma memória EEPROM em sua arquitetura interna
para ser utilizadas poupando o uso de componentes de memórias externa, porém
com certa limitação. Quando necessitamos de maior espaço de memória o uso da
memória
24LC512
exteriormente
possibilita
a
expansão
do
espaço
para
armazenamento de dados maiores. A comunicação e troca de dados entre a
memória do tipo 24LC512 é possível por existir um barramento chamado I2C e um
protocolo para essa função. (ISIS, 2010)
78
Na figura 2.25 pode ser observada uma memória do tipo EEPROM de uso
externo e simbologia.
Figura 2.25 – Tipologia PDIP 24LC512 e simbologia
Fonte: Isis, 2010, adaptado pelo autor.
As memorias EEPROM funcionam como banco de dados local para
armazenagem de informações de uso do microcontrolador ou para descargas de
dados para outros aplicativos externos de forma temporária. A escrita dos dados na
memória é feita em byte (oito bits) por vez, de acordo com a capacidade de cada tipo
de memória a ser utilizado, no exemplo da figura 2.25, os dados são gravados e
organizados de acordo com a capacidade e necessidade do projeto. No exemplo
descrito a memória tem a capacidade de 512 palavras de oito bits ficando a critério
do projetista a organização do banco a ser trabalhado em hardware.
2.14 AMPLIFICADOR OPERACIONAL (OPAMP)
Os
amplificadores
operacionais
foram
projetados
basicamente
para
realizarem operações matemáticas. Na era da tecnologia dos valvulados, eram à
base dos computadores analógicos para realizarem operações matemáticas básicas
como: adição, subtração, integração e diferenciação. Em sua concepção geral o
amplificador operacional é um elemento do circuito ideal. Com dois amplificadores
operacionais, esse tipo de amplificador possui altíssima impedância de entrada. Para
o funcionamento perfeito de forma a oferecer o melhor desempenho, os OPAMP
devem ser no caso do TL082 mostrado na figura 2.26 que é um tipo especifico para
instrumentação, deve ser alimentado com uma fonte simétrica aceitando tensões
estáveis entre 3 a 12 Volts. Possui também baixa impedância de saída e suas
entradas são diferenciais. (ISIS, 2010)
79
Figura 2.26 – OPAMP e simbologia
Fonte: Isis, 2010, adaptado pelo autor.
Um circuito OPAMP genérico possui duas entradas e uma saída com tensão
múltipla da diferença entre as duas entradas, porem alguns são feitos com saídas
diferenciais flutuantes. É muito utilizado em circuitos que precisa de nivelação e
condicionamento
de
sinais
microcontroladores. (ISIS, 2010)
elétricos
apropriados
para
acoplamento
com
80
3 MICROCONTROLADOR
Segundo Souza (2003), o microcontrolador é um circuito integrado que dotado
por uma inteligência programável pode controlar processos lógicos. Possui controles
de processo ou periféricos que podem ser diversos tais como: LED, teclado matricial
para comandos, LCD, display de segmentos, resistências, relês, sensores de
temperatura e pressão e também diversos outros dispositivos que possa ser
transformado e tratado digitalmente.
Souza (2003) explica que, nos primeiros passos da eletrônica não havia a
possibilidade do circuito ser programado e com isso sua funcionalidade deveria ser
quase que definido e único. Quando um circuito fosse desenvolvido para tal fim não
dava para modificá-lo para outro e com isso sua finalidade era única. Os cálculos
eram tantos que um novo projeto demorava anos a ser lançado e possuía tamanho
elevado. Com o passar do tempo e com a evolução da eletrônica devido à exigência
do mercado surgiu então à tecnologia dos processadores e para suprir a
necessidade de mudanças em um produto o microcontrolador. O microcontrolador é
constituído por milhões de transistores reduzidos a milhões de vezes e montado em
uma pastilha conhecida como chip. O microcontrolador é um componente eletrônico
que possui característica genérica e para funcionar precisa de um programa interno
chamado de firmware. O firmware é um programa que define a sua característica e
função em um microcontrolador.
A inteligência do microcontrolador associa-se a Unidade Lógica Aritmética
(ULA), responsável por todas as operações lógicas e matemáticas. Uma melhor
definição de um firmware é considerá-lo como um software drive como aqueles
usados em computador necessário para direcionar definições de entrada e saída de
um periférico de um computador. (SOUZA, 2003)
3.1 CONTROLADORES VERSUS PROCESSADORES
Segundo Souza (2003), os microcontroladores foram desenvolvidos para
utilização
sem
muito
microcontroladores
outros
possuem
componentes
assessórios
externos
interno
para
que
funcionar.
diferenciam
Os
dos
microprocessadores, são eles: portas de entradas e saídas; memória de dados;
81
memória de programa; contadores; timer; comunicação serial; Analog-to-Digital
Converter (ADC), conhecidos como conversores analógicos digitais; e modulação por
largura de pulso (MLP) e em inglês Pulse-Width Modulation (PWM).
Com todos esses recursos, os microcontroladores foram cada vez mais
empregados em situações que além do mínimo de espaço utilizado pudessem
desempenhar complexas tarefas sem deixar a desejar.
Já os microprocessadores são circuitos integrados incompletos e que para
funcionarem necessitam que outros componentes externos sejam adicionados, tais
como, memória e componentes de entrada e saída para receber dados.
3.2 FAMÍLIA PIC
Segundo Souza (2003) os microcontroladores da família PIC, são fabricados
pela MICROCHIP e que iniciou seus negócios no Brasil em 1990. Fundada em 1962,
desde o inicio junto com Artimar uma empresa de aplicações eletrônicas no Brasil
trabalham em conjunto como representante exclusiva e distribuidora de várias
empresas americanas no setor eletroeletrônico.
Os microcontroladores da família PIC possuem arquitetura do tipo Harvard
enquanto que a maioria dos microcontroladores triviais possui uma arquitetura do
tipo Von-Neumann. As duas arquiteturas diferenciam-se na forma em que os dados
e o programa são processados. (MICROCHIP, 1999)
Figura 3.1 – Arquitetura Von – Neumann
Fonte: Microchip, 1999, adaptado pelo autor.
82
Na arquitetura Von-Neumann, existe apenas um barramento interno
geralmente de 8 bits para o tráfego de instruções e de dados. A tipologia construtiva
do barramento para a tecnologia Von-Neumann é mostrada na figura 3.1.
(MICROCHIP, 1999)
Já os microcontroladores com tecnologia Harvard conforme pode ser visto na
figura 3.2, têm como características: dois barramentos internos, um para trafego de
dados outro para instruções; barramento de dados sempre de 8 bits e o barramento
para instrução pode ser de 12, 14 ou 16 bits dependendo do modelo do
microcontrolador PIC; permitindo que quando uma instrução é executada outra seja
buscada da memória tornando o processamento mais rápido; e o barramento de
instrução maior que 8 bits permitindo que o OPCODE da instrução já incluído o dado
e o local onde ela será executada. Com essa arquitetura utiliza-se apenas uma
posição de memória por instrução economizando muita memória de programa.
(MICROCHIP, 1999)
Os microcontroladores PIC possuem uma tecnologia chamada Reduced
Instruction Set Computer (RISC), ou seja, computador com um conjunto reduzido de
instruções. Possuem apenas 35 instruções que pode variar de acordo com o
microcontrolador, bem menos que os microcontroladores convencionais que
possuem um conjunto complexo de instruções, Complex Instruction Set Computer
(CISC), que podem chegar a mais de cem instruções. (MICROCHIP, 1999)
Figura 3.2 – Arquitetura Harvard
Fonte: Microchip, 1999, adaptado pelo autor.
Os microcontroladores são verdadeiros computadores encapsulados para
diversos fins em um só componente. Possui vantagens sobre os processadores
quanto sua facilidade em resumir projetos que necessitem de memória para
83
processos e para variáveis necessárias durante a execução do programa. Os pinos
de conexão de entrada e saída possuem características que, conforme a
configuração, podem ser configurados como entrada ou como saída. (MICROCHIP,
1999)
Figura 3.3 – Diagrama em bloco do PIC 16F877
Fonte: Microchip, 1999, adaptado pelo autor.
Figura 3.4 – Tipo PDIP
Fonte: Microchip, 1999.
84
Figura 3.5 – Tipo PLCC
Fonte: Microchip, 1999.
Figura 3.6 – Tipo QFP
Fonte: Microchip, 1999.
85
Os diagramas de pinos são desenhos que mostram o microcontrolador em
questão e seus respectivos pinos. As figuras 3.4, 3.5 e 3.6 apresentam a arquitetura
física e a disposição dos pinos dos microcontroladores PIC 16F877 e 16F874 com
características externas idênticos em suas versões de invólucros Plastic Dual Inline
Package (PDIP), Plastic Leaded Chip Carrier (PLCC) e Quad Flat Pack (QFP).
(MICROCHIP, 1999)
Os invólucros do tipo PDIP e PLCC são os mais utilizados na gravação
durante o desenvolvimento do protótipo pela facilidade de conexão nos soquetes
PDIP E PLCC, já o do tipo QFP com tecnologia de dispositivo de montagem em
superfície (SMD) não seria interessante sua utilização pelo motivo da necessidade
de soldagem para se comunicar com outros componentes do circuito eletrônico.
(MICROCHIP, 1999)
Figura 3.7 – Parte do diagrama Interno do PIC16F877A
Fonte: Microchip, 1999, adaptado pelo autor.
As características dos microcontroladores da família PIC são mostradas na
figura 3.7, pode ser visualizado partes e recursos do microcontrolador, sua ULA que
esta diretamente ligada ao registrador W.
86
3.2.1 Unidades de memória
Unidade de memória é a parte da arquitetura do microcontrolador com a
função de armazenar os dados. A figura 3.8 ilustra um tipo de memória organizada
com linha de dados e endereçamento para controle. (MICROCHIP, 1999)
3.2.2 Memória de programa
A memória de programa dos microcontroladores PIC possui tecnologia
FLASH e EEPROM isto possibilita que os dados sejam gravados e apagados
milhares de vezes, isso facilita a realização de mudanças necessárias do firmware
gravado. A capacidade da memória de programa varia de acordo com o tipo de
microcontrolador. As posições de endereço 00h a 04h da memória de programa são
reservadas, em seqüência, para o vetor de reset e interrupção.
A figura 3.9 mostra a topologia da memória de programa e em especial os oito
níveis da pilha (STACK) que são locais reservados na memória para guardar
endereços de retorno das sub-rotinas. (MICROCHIP, 1999)
Figura 3.8 – Memória simplificada
Fonte: Microchip, 1999, adaptado pelo autor.
87
3.2.3 Memória de dados
Figura 3.9 – Mapa de memória de programa e pilha
Fonte: Microchip, 1999.
Conforme Microchip (1999), a memória de dados no microcontrolador PIC é
de dois tipos: RAM e EEPROM.
RAM é uma memória de acesso randômico e armazenamento volátil, ou seja,
perde os dados sempre que desligar o microcontrolador. Seus dados são
88
organizados em bancos (blocos) com dois registros: Special Function Register
(SFR), são os registros de funções especiais; e General Purpose Register (GPR), os
registros de uso geral conforme ilustração da figura 3.10.
Figura 3.10 – Organização dos bancos de memória de dados
Fonte: Microchip, 1999.
De acordo com Microchip (1999), os dois tipos de registros são formados por
palavras de 8 bits distribuídos por diferentes bancos que dependendo do tipo de PIC
altera o número do bancos e também a forma como os dados são distribuídos.
EEPROM é do tipo não volátil e acessado indiretamente através dos registros
EEADR e EEDATA. Essa memória é normalmente utilizada para guardar
89
informações ou parâmetros executados pelo programa durante a execução, por
exemplo, valores de tensão, corrente, resistência, entre outros.
Segundo Microchip (1999), a memória de dados é dividida ou organizada em
vários bancos contendo os registros SFR e GPR. Os bits de seleção desses bancos
são feitos por RP1 (STATUS <> 6) e RP0 (STATUS <5>) conforme pode ser
observado no quadro 3.1.
Quadro 3.1 – Seleção do banco de memória
RP1:RP0
Bank
00
0
01
1
10
2
11
3
Fonte: MICROCHIP, 1999.
O quadro 3.1 mostra a seqüência de bits com quatro possíveis configurações
dos Bancos de dados a serem selecionados conforme com os valores a seguir:
RP1= 0 e RP0= 0, configura que o Banco 0 esta selecionado.
RP1= 0 e RP1= 1, configura que o Banco 1 esta selecionado.
RP1= 1 e RP0= 0, configura que o Banco 2 esta selecionado.
RP1= 1 e RP0= 1, configura que o Banco 3 esta selecionado.
3.3 UNIDADE CENTRAL DE PROCESSAMENTO
A UCP é a parte central de processamento do microcontrolador, é
responsável por extrair a instrução e decodificá-la para finalmente executá-la.
Funciona como um cérebro que interliga todas as partes que compõe o
microcontrolador. A figura 3.11 mostra a relação da UCP com demais periféricos
utilizados no processamento de dados.
A UCP é o local com capacidade para executar operações de multiplicação,
divisão e subtração movendo seus conteúdos de um lugar para outro na memória. A
UCP esta diretamente ligada com os registradores de processo chamados de
registros, mostrada pela figura 3.12. A velocidade de processamento depende do
relógio acoplado no sistema de hardware que define a velocidade que o programa
90
será executado e isso é uma particularidade de cada tipo microcontrolador.
(MICROCHIP, 1999).
A principal função dos registros é guardar dados temporários que serão
usados pela UCP durante o processamento e para que isso seja possível é
necessário comandos de controle de endereçamento entre esses registros por
caminhos chamados de data bus. (MICROCHIP, 1999)
Figura 3.11 – Esquema UCP
Fonte: Microchip, 1999.
Figura 3.12 – UCP simplificado com três registros
Fonte: Microchip, 1999, adaptado pelo autor.
91
Figura 3.13 – BUS de dados no PIC.
Fonte: Microchip, 1999, adaptado pelo autor.
Barramento é o caminho físico que corresponde a um grupo de 8, 16 ou mais
linhas que permitem a comunicação entre os dispositivos do microcontrolador, de
acordo com Microchip (1999), pode ser de dois tipos: barramento de dados e
barramento de endereço. A figura 3.13 mostra os barramentos do PIC.
Barramento de dados, o número de data bus depende da quantidade de
memória que deseja endereçar, serve para transmitir endereços do UCP para a
memória. No barramento de endereço, seu número de linhas depende da largura da
palavra de dados, no caso oito, faz a ligação de todos os blocos, ou seja, periféricos
do microcontrolador. (MICROCHIP 1999)
3.4 UNIDADE DE ENTRADA E SAÍDA
A unidade de entrada e saída são chamados de ports e no PIC 16F877
existem cinco ports que podem ser configurados como entradas ou como saídas
além de possuírem outras especificações extras. Antes de configurar as ports é
necessário saber classificar quais serão usados como entradas e como saídas. A
quantidade de entrada e saída de um projeto determina o tipo de PIC a ser usado,
no caso do PIC 16F877 são 33 pinos de entrada e saída disponíveis para controle
de LCD, LED, teclados matriciais e sensores (MICROCHIP, 1999). A figura 3.14
mostra um exemplo simplificado do microcontrolador PIC 16F877A.
92
Figura 3.14 – Exemplo de I/O simplificado
Fonte: Microchip, 1999, adaptado pelo autor.
Na programação do PIC, as ports funcionam como um local de memória e
qualquer coisa a ser lido ou escrito são identificados facilmente nos pinos do
microcontrolador. A seguir serão mostradas as nomenclaturas utilizadas com as
ports do PIC16F877A e suas as respectivas funções.
A port A possui seis bits configuráveis como entradas ou saídas, ou também
como entradas analógicas para o conversor analógico digital do PIC (ADC) conforme
é mostrado no quadro 3.2.
Quadro 3.2 – PORT A
RA0/AN0
Bit zero ou também como entrada zero do ADC
RA1/AN1
Bit um ou também como entrada um do ADC
RA2 /AN2/VREF
Bit dois ou também como entrada dois do ADC e
referência analógica de tensão negativa
RA3 / AN3/VREF+ Bit três ou também como entrada três do ADC e
referência analógica de tensão positiva
Bit quatro ou também como entrada de relógio (CLOCK)
RA4/TOCKI
do contador zero (Timer0). Saída do tipo dreno aberto
Bit cinco ou também como entrada quatro do ADC e
RA5/AN4/SS
também como escravo de seleção para o sincronismo
da porta de comunicação serial.
Fonte: Microchip, 1999.
A port B possui oito bits configuráveis como entradas ou saídas, ou também
receber via software resistência pull-up em todas as entradas conforme mostra a
quadro 3.3.
93
Quadro 3.3 – PORT B
RB0/INT
Bit zero ou também pode ser o pino de interrupção
externa
RB1
Bit um sem função adicional
RB2
Bit dois sem função adicional
RB3/PGM
Bit três ou também pode ser à entrada de programação
de baixa tensão
RB4
Bit quatro sem função adicional
RB5
Bit cinco sem função adicional
RB6/PGC
Bit seis ou também pino de interrupção de mudança ou
depuração in-circuito. Entrada de sincronismo da
programação serial
RB7/PGD
Bit sete ou também pino de interrupção de mudança ou
depurador in-circuito. Entrada de dados da programação
serial
Fonte: Microchip, 1999.
A port C possui oito bits configuráveis como entrada ou saídas conforme
mostra o quadro 3.4.
Quadro 3.4 – PORT C
RC0/T1OSO/T1CKI Bit zero ou também como saída do oscilador ou entrada
de sincronismo (CLOCK) do Timer1
RC1/T1OSI/CCP2
Bit um ou também como entrada do oscilador Timer1 ou
entrada dois de captura/saída dois do comparador/saída
dois do modulador por largura de pulso (PWM)
RC2/ CCP1
Bit dois ou também como entrada um de captura/saída
um do comparador/saída um do modulador por largura
de pulso (PWM)
RC3/SCK/SCL
RC4/SDI/DAS
RC5/SDO
RC6/TX/CK
RC7/RX/DT
Fonte: Microchip, 1999.
Bit três ou também como saída de sincronismo serial
síncrono de entrada e tanto para o modo SPI e
comunicação I2C
Bit quatro ou também pode ser SPI em dados (modo
SPI) ou dados de E/S (modo I2C)
Bit cinco ou também pode ser à saída de dados no
modo SPI
Bit seis ou também pode ser a transmissão (TX)
assíncrona USART ou sincronismo síncrona
Bit sete ou também pode ser a recepção (RX)
assíncrona USART ou dados assíncronos
94
A port D possui oito bits configuráveis como entradas ou saídas, quadro 3.5.
Quadro 3.5 – PORT D
RD0/PSP0
Bit zero do barramento paralelo escravo
interface com BUS de processador
RD1/PSP1
Bit um do barramento paralelo escravo quanto
com BUS de processador
RD2/PSP2
Bit dois do barramento paralelo escravo
interface com BUS de processador
RD3/ PSP3
Bit três do barramento paralelo escravo
interface com BUS de processador
RD4/PSP4
Bit quarto do barramento paralelo escravo
interface com BUS de processador
RD5/PSP5
Bit cinco do barramento paralelo escravo
interface com BUS de processador
quanto à
à interface
quando à
quando à
quando à
quando à
RD6/PSP6
Bit seis do barramento paralelo escravo quando à
interface com BUS de processador
RD7/PSP7
Bit sete do barramento paralelo escravo quando à
interface com BUS de processador
Fonte: Microchip, 1999.
Outra possibilidade do port D é a comunicação do microcontrolador através
do barramento paralelo com outros dispositivos externos.
A port E possui três bits configuráveis como entradas ou saídas conforme é
mostrado no quadro 3.6.
Quadro 3.6 – PORT E
RE0/RD/AN5
RE1/WR/AN6
RE2 /CS/AN7
Fonte: Microchip, 1999.
Bit zero ou também o pino de
controle para o barramento paralelo
escravo e/ou entrada cinco do ADC
Bit um também o pino de controle
de escrita para o barramento
paralelo escravo e/ou entrada seis
do ADC
Bit dois ou também o pino de
seleção para o barramento paralelo
escravo e/ou entrada sete do ADC
95
3.5 COMUNICAÇÃO SERIAL
Figura 3.15 – Unidade serial RX e TX com três linhas
Fonte: Microchip, 1999, adaptado pelo autor.
A comunicação de dados em serial trata da transmissão de valores
binário em série correspondente a um arquivo, ou seja, um a um em linha. Esse tipo
de comunicação é ideal para transmitir informações de um local para outro, até
mesmo por rádio. Para que haja comunicação entre dois pontos é preciso que
tenhamos definido uma regra para a troca de dados, essa regra é chamada de
protocolo que deve ser definido com antecedência para que não aconteçam
problemas de entendimento entre as partes envolvidas. Para que os dados
processados pelo PIC sejam enviados para outro dispositivo e também possibilitar
que outros dispositivos enviem dados para o PIC, uma unidade de comunicação em
série faz necessária e pode ser visto o modo de comunicação por três linhas na
ilustração da figura 3.15. (MICROCHIP, 1999)
No PIC 16F877A, o porto responsável em fazer a comunicação em série para
o mundo exterior é o PORTD através dos pinos 25 - RC6/TX/CK, 26 - RC7/RX/DT e
a referência serial é o negativo (GND). (MICROCHIP, 1999)
3.6 UNIDADE DE CONTAGEM/TEMPORIZAÇÃO
A função da unidade de contagem ou temporização é permitir aos
microcontroladores calcular através de base de tempo confiável e ideal para uso em
96
processos científicos suficientes por este intervalo. Tanto para um relógio acerca da
hora, duração ou protocolo a unidade básica de temporização é um contador
importante, registro ou local capaz de guardar conteúdo que aumenta sua unidade
em intervalos de tempo fixo e seguro conforme pode ser observado na figura 3.16.
(MICROCHIP, 1999)
Figura 3.16 – Unidade temporização
Fonte: Microchip, 1999, adaptado pelo autor.
Figura 3.17 – Diagrama em bloco do TIMER0/WDT e PRESCALER
Fonte: Microchip, 1999.
97
Para trabalhar com projetos onde faz necessário uso de temporizadores que
precisam de alguma forma controlar com base de tempo em processos ou rotinas
durante a execução do programa, a compreensão do uso dos contadores e
temporizadores do PIC são essenciais, visto que o projeto MAMCEE utiliza como
base de tempo intervalo constante e confiável para que se possa fazer o acumulo do
kWh. Na figura 3.17 um diagrama pode ser observado com o módulo TIMER0,
PRESCALER e WATCHDOG (WDT) compartilhados. (MICROCHIP, 1999)
O módulo de tempo (TIMER0) é um contador/temporizador com as seguintes
características: oito bits que pode ser lido e escrito; PRESCALER de oito bits
programável via software; pode ser usado tanto com sincronismo de relógio
(CLOCK) interno como externo; interrupção por estouro de 00 h à FF h. e opção de
seleção de borda para relógio de sincronismo externo. (MICROCHIP, 1999)
3.7 DIVISÃO DO RELÓGIO (PRESCALER)
O módulo de tempo (TIMER1) é um temporizador/contador de 16 bits que
possuem as seguintes características: formado por dois registradores de oito bits
(TMR1H e TMR1L) legíveis e graváveis; possui um conjunto de TMR que possibilita
juntos incrementos que vai de 0000h até FFFF h; a interrupção do TMR1 quando
habilitado é gerado no estouro travado na interrupção FLAG bit TMR1 (PIR1 <0>),
esta interrupção que pode ser ativado ou desativado por configuração/compensação
de TMR1 interromper. (MICROCHIP, 1999)
3.8 WATCHDOG
O WATCHDOG é um bloco do microcontrolador dotado de um contador que
mantém em contagem zero enquanto o programa esteja em perfeita execução. Caso
o programa trave, por algum motivo, o contador atinge seu valor máximo e faz o
reset do microcontrolador automaticamente sem a intervenção humana. A
importância desse tipo de contador sentinela assegura que qualquer programa
execute fielmente mesmo que estiver em execução em locais distantes para, para
seu funcionamento é preciso habilitar a função WATCHDOG com o parâmetro
WDT_ON, para desabilitar o parâmetro é WDT_OFF. A figura 3.18 mostra esta
98
opção de configuração no editor de projeto do MikroC versão 8.2. (MICROCHIP,
1999)
Figura 3.18 – Edit project do MIKROC para PIC
Fonte: MikroC, 2008.
3.9 CONVERSOR ANALÓGICO DIGITAL
O ADC é um registrador que tem a finalidade de guardar valores digitalizados
por um conversor de sinal analógico de níveis variáveis a níveis de sinal digital
compatível com o controlador PIC, no caso, zero e um. O PIC16F877A possui
apenas um local, de 10 bits, para armazenar esses valores convertidos. Para
acumular os valores convertidos é necessário armazenar em outro local da memória
RAM para utilização durante a execução do programa ou até mesmo guardá-lo em
99
local de memória não volátil para que não se perca caso aconteça um reset do
sistema no microcontrolador. (MICROCHIP, 1999)
Figura 3.19 – Bloco conversor analógico digital
Fonte: Microchip, 1999, adaptado pelo autor.
O bloco conversor analógico e digital é responsável pelas conversões de
grandezas analógicas do mundo real em valores digitais compreendidos pelo
microcontrolador PIC. Com isso, é possível utilizar os microcontroladores para
trabalhos que necessite converter com precisão variações encontrados em
fenômenos da natureza, tais como, vento, chuva, temperatura, umidade, entre
outros, para serem processados por meios computacionais. (MICROCHIP, 1999)
O PIC é uma família de microcontroladores desenvolvidos para aplicações em
variados seguimentos, tais como, na indústria automotiva, sensores remotos,
fechaduras elétricas, controles de máquinas de lavar roupas e outros dispositivos
para monitoramentos diversos. Como possuem tecnologia de memória Flash,
permite flexibilidade e economia com o desenvolvimento de projetos idealizados em
laboratórios antes de serem encaminhados para o centro fabril. Devido ao seu baixo
consumo de energia, os microcontroladores PIC, podem ser utilizados em projetos
de monitoramento a distância alimentada por baterias.
Neste capitulo foram abordados informações especificas e importantes para
o tipo de microcontrolador utilizado no desenvolvimento do MAMCEE.
A utilização do ADC é de extrema importância na conversão dos sinais
elétricos lidos em uma rede ou circuito de alimentação qualquer, pois sem este tipo
de recurso não seria possível o tratamento digital dos dados internamente pelo
microcontrolador.
100
Após a conversão dos sinais elétricos é possível realizar inúmeros
processamentos dos dados, um deles é o calculo para obtenção e acumulo do kWh
e para isso não poderia ser feito com estabilidade e confiança sem a utilização de
temporizadores. A utilização de memórias não voláteis e de tecnologia FLESH ou
EEPROM possibilita que o dispositivo tenha capacidade de armazenar as
informações que não podem ser perdidas durante falhas ou falta de energia dando-o
mais credibilidade e confiança ao projeto MAMCEE.
Outro recurso importante
oferecido por este tipo de microcontrolador é a capacidade de comunicação serial
com outros meios externos possibilitando múltipla aplicação. Esses entre outros
recursos são conhecimentos imprescindíveis para trabalhos com microcontroladores
e dispositivos de hardware.
101
4 MAMCEE
Neste capítulo descreve-se o MAMCEE a partir de sua montagem, com os
devidos componentes eletrônicos utilizados, as ferramentas utilizadas para o
desenvolvimento do firmware, hardware. Uma etapa muito importante para este
trabalho de pesquisa e desenvolvimento foram as simulações efetuadas durante o
desenvolvimento que demonstra o funcionamento em um ambiente virtual trazendo
economia e flexibilidade para possíveis mudanças durante seu desenvolvimento.
O MAMCEE tem como propósito geral contribuir de forma educativa o
consumo de energia elétrica dos eletrodomésticos em uma instalação com
fornecimento monofásico. O seu funcionamento básico consiste, inicialmente, em
sensores ligados junto à entrada de energia elétrica com finalidade de coletar as
informações do consumo elétrico, tratá-los em uma aplicação e armazena-los em
banco de dados.
4.1 CÁLCULO DE CONSUMO DE ENERGIA
O cálculo automático do consumo de energia elétrica envolve os elementos
que formam a eletricidade, tais como, corrente elétrica, tensão elétrica e potência
elétrica. Para isso, é necessária a aplicação fundamental da tensão e corrente
instantânea consumida em um circuito, não se pode aplicar sensor de corrente que
mensura o fluxo instântaneo e considerar que a tensão envolvida seja constante em
127 V ou 220 V. Esta metodologia cria medições fora do contexto real, importante
lembrar que a corrente e a tensão elétrica são diretamente proporcionais e na falta
de ambas não tem diferença de potêncial, ou seja, a energia elétrica para ser
consumida por aparelhos elétricos.
Para o projeto faz necessário a utilização de dois sensores destintos, sensor
de tensão que é necessário para mensurar variações de tensões elétricas em um
circuito elétrico consumidor e o sensor de corrente, necessário para mensurar
variações do fluxo de corrente absorvida por um circuito elétrico consumidor. Com a
aplicação desses dois tipos de sinais elétricos em uma equação de potência é
possivel obter o potêncial real absorvida por um aparelho elétrico conforme exemplo
da figura 4.1.
102
Figura 4.1 – Cálculo real da potência instantânea absorvida
Fonte: Elaborado pelo autor, 2012.
As medições apresentadas na figura 4.1, mensurada em um momento que a
tensão da rede apresenta um valor real de 218.6 V e a corrente média absorvida por
um determinado aparelho é de 1.25 A, sua potência instantânea consumida seria de
273.25 W. Em outro dado momento em que a tensão apresenta 223.5 V, sendo que
o consumo médio do aparelho testado é de 273.25W, a corrente absorvida para
satisfazer a mesma equação não seria mais de 1.25 A e sim de aproximadamente
1.22 A. Assim, conclui-se que não se pode deixar de considerar o uso de dois
sensores como referência de aquisição de grandezas reais que possibilite fazer
cálculos matemáticos relacionados com a eletricidade para fins mensuráveis e de
tarifação de energia elétrica confiável.
Para o monitoramento de energia elétrica é interessante que o dispositivo
esteja preparado para trabalhar com variações ou diferentes níveis de tensões e de
corrente elétrica, visto que, a tensão, assim como a corrente é variante no tempo e
em determinado momento a tensão nominal teórica de 220 V pode variar em um
valor entre 201 V a 231 V conforme especificação encontrada na conta de energia
com tipo de fornecimento 220/380 V.
Figura 4.2 – Cálculo da Potência Média
Fonte: Elaborado pelo autor, 2012.
103
O consumo de energia elétrica é feito em KWh, ou seja, a quantidade de
energia elétrica consumida em 1 hora. No exemplo da figura 4.1, a potência de
273,25 watts/hora tem a fração em um segundo sendo que uma força (F) desenvolve
um trabalho (Fτ) com um intervalo (∆t) e a potência media (Pm) dessa energia
determinada conforme pode ser observado pela figura 4.2. (GASPAR, 2009)
Na situação que o intervalo de tempo seja muito pequeno (∆t→0), a potência
media (Pm) é considerado potência instantânea P(t) que em sua constância pode-se
afirmar que P(t) = Pm.
Em relação à eletricidade, tendo os sinais relativos à tensão e a corrente
elétrica pode-se calcular a potência elétrica instantânea da carga em mensuração. O
produto dessa relação esta definida por: P(t) = V(t). I(t), onde V(t) é o valor da tensão
instantânea e I(t) o valor da corrente elétrica instantânea.
Desta forma, conforme a figura 4.3, a potência elétrica desenvolvida de
273.25 W durante uma hora de trabalho constante determina a fração de potência
em segundos.
Figura 4.3 – Cálculo da Potência por Segundos
Fonte: Elaborado pelo autor, 2012.
Ps é a potência fragmentada em segundo, P(t) é o produto da tensão
multiplicado pela corrente instantânea e ∆t é o tempo de uma hora em segundos.
Tem-se assim:
1 hora = 3600s
∆t = 3600s
Ps = Watts absorvidos em 1 segundo (W/s)
W/s = 273.25 / 3600
W/s = 0.075902778 ≅ 75.902 mW/s
104
Desta forma o produto da potência desenvolvida através da absorção da
tensão de 218.6 V pela corrente de 1.25 A é determinada pelo consumo instantâneo
por segundo acumulado durante uma hora de trabalho. Conclui-se que a potência
absorvida é o resultado da somatória de fragmentos da potência instantânea
acumulados durante 3600 amostras em segundos em 1 hora de funcionamento.
Em engenharia elétrica essa mesma complexidade de potência instantânea
média desenvolvida durante certo período de tempo T pode ser calculada a partir da
integral temporal da potência instantânea apresentada pela figura 4.4.
Figura 4.4 – Equação Potência Média
Fonte: LIMA, 2007.
Considerando E a energia dada em kWh, desde que o consumo dado em
quilowatt e o tempo em hora, à quantidade de energia consumida durante um
determinado tempo, calculam-se a quantidade consumida em um intervalo (t2 – t1)
integralmente no tempo através da equação ilustrada pela figura 4.5.
Figura 4.5 – Energia temporal consumida
Fonte: LIMA, 2007
Em contra partida essa complexidade pode trazer problemas na realização do
algoritmo dedicado a esse cálculo. No cenário em que a tensão é um elemento que
mantém ou deveria manter-se estável em relação à corrente que flutuante o tempo
todo e em instantes diferentes, influencia diretamente na variação da potência
elétrica consumida instantaneamente no período de 1 hora de mensuração. O
gráfico da figura 4.6 mostra uma noção da realidade deste cenário.
105
Figura 4.6 – Perspectiva de variação de consumo
Fonte: Elaborado pelo autor, 2012.
Devido à complexidade desse cenário, pretende-se utilizar como solução o
TIMER0 ou TIMER1 do microcontrolador de forma que a cada um segundo
precisamente e estável faça captura da V(t) e da I(t) para calcular a P(t) e dividindo-a
em 3600 partes acumulando uma parte dessa fração a cada segundo. A somatória
do fragmento da P(t) quando atingida 1000 watts causando o incremento do
contador de kWh.
4.2 AQUISIÇÃO DOS SINAIS ELÉTRICOS
4.2.1 Formação do sinal de corrente
Durante as pesquisas realizadas para levantamento de requisitos para o
desenvolvimento do MAMCEE, foram analizados diversos tipos de sensores, desde
um transformador de corrente até o mais sofisticado sensores da familia Allegro ACS
75x desenvolvido pela Allegro Micro Systems.
Como por padrão estabelicido por concessiorias de energia elétrica o
fornecimento monofasico de energia elétrica possui dois tipos conhecidos: 127/220
V e o 220/380 V, sendo o primeiro tipo de fornecimento encontrado na maioria das
cidades do Brasil e o segundo bem restrito, porem sempre a tensão fornecida estará
entre 127 e 220 V em qualquer uma das situações de fornecimento a corrente
máxima de medição do sensor fica em 100A.
106
O sensor empregado na aquisição dos sinais de corrente elétrica foi o sensor
de efeito hall da familia Allegro ACS75x, o ACS756SCA-050B. Segundo informações
tecnica contida no manual do fabricante o sensor possui boa linearidade na faixa de
corrente primária (Ip) de -50A a 50A suficiente para o ensaio em laboratorio. A
grande facilidade na utilização desse tipo de sensor é o desprezo de fonte de
alimentação simétrica que tornaria o projeto mais complexo e no caso do uso com
acumulador a necessidade de duas para formação simétrica. A tensão do sinal de
saída referente a corrente elétrica medida é sempre positivo.
Figura 4.7 – Sensor de corrente ACS
Fonte: Allegro, 2012, adaptado pelo autor.
Na figura 4.7 pode ser observado o formato do encapsulamento deste
componente que facilta a montagem em placa de circuito impresso. O sensor possui
5 terminais. Os pinos 4 e 5 são os mais reforçados e neles são ligados em série com
o circuito a ser monitorado pelo MAMCEE. Já os terminais 1, 2 e 3 são de vital
importância para o funcionamento do sensor. Os pinos de Vcc e Gnd são
alimentados com uma tensão tipica e constante de 5 Vcc.
Basicamente o seu funcionamento constitui da passagem da corrente pelo fio
de cobre interno com resistência de 130µΩ, gera um campo magnético absorvido
pelo sensor Hall. Internamente o sensor possui vários dispositivos amplificadores,
filtros e tratam o sinal em sua saída pelo pino 3 de forma que fique linear, constante
e proporcionalmente fiel a corrente primária. Seu sistema interno eletrônico possui
recursos analógicos de tratamento de sinal que fornece uma saída concentrada em
Vcc/2. Na figura 4.8 pode ser observada gráficamente a tensão de saída em função
da corrente primária de entrada para este sensor.
107
Figura 4.8 – Linearidade do sensor de efeito Hall
Fonte: Allegro, 2012.
Podendo operar até 100A este sensor possui linearidade entre -50A à 50A
ficando desproporcional em medições de -50A até -100A e entre +50A a +100A. A
sensibilidade é uma das características fundamentais neste dispositivo e o cálculo
para esse fundamento é dado conforme figura 4.9.
Figura 4.9 – Linearidade matemática do sensor ACS
Fonte: Allegro, 2012.
A lineariade do sensor ACS756SCA-050B fornece como sinal de saída de
0,5V a 4,5V correspondente a corrente primária de -50A a +50A. Em razão a escala
de linearidade possui 4,5V – 0,5V ficando com faixa total de 4Vcc, porém na
aplicação com AC essa faixa de precisão fica compreendido em 50% do total.
A utilização do sensor ACS756SCA-050B para o MAMCEE fica desprezado
essa simetria onde a corrente em repouso é de Vcc/2, portanto quando a corrente
primária for nula, a saída do pino 3 fornece uma tensão de 2,5V.
Conforme as características tecnicas do manual do fabricante esse sensor
possui as seguintes proporções primárias com relação a saída:
108
Ip = 0A – Vout = 2,5V;
Ip = 25A – Vout = 3,5V;
Ip = 50A – Vout = 4,5V.
Logo pode ser comprovado que a simetria do sensor é centrada com tensão
de saída de 2,5V representando corrente primária nula e, portanto com a corrente
primária em 25A o nível de tensão de acordo com a sensibilidade do sensor de 40
mV/A será de 3,5V conforme solução da equação apresentada pela figura 4.10.
Figura 4.10 – Equação que define sensibilidade do ACS
Fonte: Allegro, 2012.
Onde Ip é a corrente primária, Vout(25A) a tensão de saída quando estiver
passando pelo sensor uma corrente de 25A, Vref a tensão de saída Vcc/2 quando a
corrente primária for igual a zero e ISens a tensão de resolução por ampére do
sensor de corrente.
Solução: Ip = (3,5 V- 2,5 V) / 40 mV/A;
Ip = 1 V / 40 mV/A;
Ip = 25A
Na solução seguinte confirma-se o valor de saída Vout do sensor quando a
corrente primária atingir 50A.
Solução: Ip = (4,5 V – 2,5 V) / 40 mV/A;
Ip = 2 V / 40 mV/A;
Ip = 50A
Por fim a variação da tensão total na saída do sensor de corrente por efeito
Hall é: ∆Vout = 4,5 V – 2,5 V = 2 V;
4.2.2 Digitalização do sinal de corrente
A digitalização dos sinais elétricos referente a corrente elétrica mensurado
109
consiste em capturar a cada ciclo de máquina ou por uma condição em tempo
constante o valor presente na entrada analógica do microcontrolador. O registrador
responsavel em converter os sinais elétricos analogicos em digital é o ADC. A
corrente elétrica por ser uma variante no tempo, o dispositivo de captura do ADC
possui um capacitor que carrega com o valor da tensão no momento e entrega ao
registrador que faz os devidos cálculos e deslocamento. A resposta de saída
digitalizada é uma cópia exata ou aproximada do valor analógico de entrada definido
por uma razão quase fiel determinado pela quantidade de bits a essa conversão.
Uma vez configurado o sensor de efeito Hall de forma a mensurar variações
de corrente elétrica em seus terminais 4 e 5, os níveis não são estáveis por se tratar
de origem com valores oscilante como no caso da rede elétrica CA 127/220V é de
60 ciclos por segundos (60Hz) essa frequência se dá com duração por ciclos de
1/60, ou seja, 16,66 mili segundos (ms).
Figura 4.11 – Resolução matemática por bit
Fonte: Allegro, 2012.
Antes da digitalização dos sinais elétricos correspondentes é preciso tratar
esses sinais de forma a manter o mínimo de oscilação e preservar realidades
lineares da corrente elétrica para facilitar a captura pelo conversor analógico digital
(ADC). Possiveis correções para estabilização dos valores em nivel digital poderão
ser tratados via software de forma a sincronizar o tempo de leitura na mesma
frequência, sendo que, o microcontrolador trabalha em uma frequência muito
superior a esta pretendida, e que certamente para um cristal de 4 MHz o ciclo de
máquina desenvolvido pelo microcontrolador é: frequência do oscilador (FOSC)
dividido por 4 (FOSC/4 = 1 MHz), ou seja, 1 milhão de ciclos por segundo.
Na conversão analógico para binário os niveis elétricos capturados pelo ADC
referente a corrente elétrica no primário do sensor serão digitalizados por uma
resolução de 10 bits (2^10 = 1024) obtem a seguinte resolução por bit determinada
110
pela equação (5) de 1,95 mV.
Aplicando-se a fórmula da equação conforme figura 4.11, é obtido o
escalonamento da corrente real (Irms), de 0 A à 50 A da seguinte forma:
((Bit 0) - 0 * 0.00195 V DC = 0 V / 0, 040 mV/A = 0 A)
((Bit 1) - 1 * 0.00195 V DC = 0, 00195 V / 0, 040 mV/A = 0, 04875 A)
((Bit 100) - 100 * 0.00195 V DC = 0, 195 V / 0, 040 mV/A = 4, 875 A)
((Bit 500) - 500 * 0.00195 V DC = 0,975 V / 0, 040 mV/A = 24, 375 A)
((Bit 1023) - 1023 * 0.00195 V DC = 1, 99 V / 0, 040 mV/A = 49, 75 A)
Figura 4.12 – Equação Corrente Elétrica Real absorvida
Fonte: Allegro, 2012.
Onde Irms é a corrente elétrica real absorvida na rede elétrica, ADC o valor
escalonado de bits e ISens a resolução em Volts por Ampére (mV/A) produzido pelo
sensor de corrente.
Figura 4.13 – Sensor de corrente na rede elétrica
Fonte: Elaborado pelo autor, 2012.
O instrumento utilizado na medição de corrente elétrica é o amperímetro e a
sua aplicação é em série com a carga na rede elétrica conforme pode ser observado
na figura 4.13.
111
4.2.3 Formação do sinal de tensão
Os sensores de tensão funcionam como um medidor de tensão (voltímetro)
com alta impedância de entrada, tem por finalidade ler elevados niveis de tensões
em sua entrada proporcionando niveis de tensões compativeis com niveis aceitáveis
por microcontroladores de 0 - 5 V. Sua alta impedância de entrada possibilita
medições sobre a diferença de potencial preservando as características da tensão
de entrada em níveis menores em sua saída, conforme pode ser observado na
analogia da figura 4.14.
Figura 4.14 – Sensor de tensão na rede elétrica
Fonte: Elaborado pelo autor, 2012.
Existem sensores de tensão de diversas tecnologias no mercado, porém o
custo é elevado não atendendo premissa de custo-benefício para o desenvolvimento
do MAMCEE e por determinação o circuito de condicionamento de tensão será
desenvolvido utilizando componentes de baixo custo com precisão de forma a
preservar com integridade o formato de onda encontrado em uma rede elétrica e
com boa isolação galvânica evitando risco de queima do microcontrolador e
operação do dispositivo.
O sensor de tensão (voltímetro) deve ser ligado em paralelo com a rede
elétrica CA conforme ilustração da figura 4.14 produzindo em sua saída uma forma
de onda idêntica a encontrada em seu primário, porém com amplitude rebaixada.
Essa analogia pode ser melhor compreendida pela figura 4.15. Como a tensão a ser
aplicada no microcontrolador deve ser entre 0 e 5 Vcc, pode-se definir que: para
uma escala de tensão linerar de 0 – 5V, considera-se um escalonamento primário de
112
entrada de 0 – 500V não precisamente linear abaixo de 90 V e acima de 400 V, em
razão da faixa de tensão AC encontrada ter o seguinte padrão: para a tensão
nominal de 127V a variação assegurada pela concessão fica compreendido entre
103 – 127V, e para a nominal de 220V a variação fica entre 206 – 254V.
Figura 4.15 – Tensão de saída proporcional
Fonte: Elaborado pelo autor, 2012.
4.2.4 Digitalização do sinal de tensão
De acordo com as características e limites de entrada de um microcontrolador
a escala de tensão a ser digitalizada fica definida da seguinte forma: para a tensão
nominal de 127 V primário dividindo-a por 100, tem-se 1.27 V e para a tensão de
220 V primário sua representação em escala menor de 2.20 V e fica compreendido
entre 0 e 5 V adequado para o microcontrolador.
Na resolução binária (Rbit) do ADC do microcontrolador de 10 bits (2^10) temse a seguinte definição: conversão decimal para binário, tensão máxima de escala 5
V (Vref), dividindo por 2^10 (1024 bits), resolução por bit de 4.88 mV representada
pela equação da figura 4.11.
Aplicando-se a fórmula da equação da figura 4.16, a resolução obtida pela
digitalização dos sinais elétricos possui a seguinte graduação em escala de tensão
real (Vrms).
((Bit 0) - 0 * 0, 00488 V DC * 100 ~ 0, 000 V AC …)
((Bit 1) - 1 * 0, 00488 V DC * 100 ~ 0, 488 V AC …)
((Bit 100) - 100 * 0, 00488 V DC * 100 ~ 48, 8 V AC...)
((Bit 500) - 500 * 0, 00488 V DC * 100 ~ 244, 0 V AC...)
113
((Bit 1023) - 1023 * 0, 00488 V DC * 100 ~ 499, 2 V AC)
Figura 4.16 – Equação Tensão Elétrica Real
Fonte: Elaborado pelo autor, 2012.
Onde Vrms é a tensão elétrica real presente na rede, ADC o valor escalonado
de bits e C a constante utilizada para enquadrar a tensão da rede real dentro da
escala 1/100 permitida pelo microcontrolador.
A lógica de funcionamento e configuração geral do MAMCEE está
representada em blocos conforme a figura 4.17.
Figura 4.17 – Diagrama de funcionamento do MAMCEE
Fonte: Elaborado pelo autor, 2012.
A representação por diagrama apresentado na figura 4.17 tem por finalidade
dispor uma visão ampla dos principais recursos proposto do MAMCEE de forma
simples e objetiva. Dentro de suas limitações funcionais, os transdutores de tensão e
de corrente geram sinais elétricos em proporções menores correspondentes ao fluxo
de corrente e diferença de potencial a ser mensurado. O resultado obtido pela
captura dos sinais analógicos após os dados serem digitalizados e processados são
disponibilizados em um display LCD em tempo real e também por comunicação
serial RS232 sempre que solicitado por sistemas computacionais externos.
114
4.3 PROTÓTIPO MAMCEE
Nesta etapa serão abordadas todas as etapas que contribuem para a
realização da montagem da placa de interface MAMCEE. O processo de
desenvolvimento no geral se resume em dois aspectos fundamentais conforme as
descrições a seguir: Hardware - toda a parte física que constitui a interface
MAMCEE o que possibilita a aquisição de informações analógicas do mundo real
necessárias ao calculo e processamento de informações relativas ao consumo de
energia elétrica que serão interpretados e disponibilizados a entendimento humano;
Software - estrutura lógica compreendida por uma sequência de instruções com
objetivo de interpretar e executar através de um microcontrolador as informações
lidas por sensores adequados na aplicação com energia elétrica e transformá-las em
soluções desejadas o mais próximas possível da compreensão humana.
Figura 4.18 – Diagrama Modular do MAMCEE
Fonte: Elaborado pelo autor, 2012.
115
Figura 4.19 – MFARD: Suplemento de energia
Fonte: Elaborado pelo autor, 2012.
116
A arquitetura do MAMCEE obedece a critérios fundamentados através de
sistemas de montagem distribuídos e organizados em módulos. Esse tipo de
arquitetura de montagem facilita a compreensão de cada etapa do projeto. Os
módulos que constituem a interface MAMCEE são as seguintes:
Módulo 1 - Fonte de Alimentação e Referencias de Dado (MFARD);
Módulo 2 - Coleta e Condicionamento dos Sinais Elétricos (MCCSE);
Módulo 3 - Processamento e Visualização dos Dados (MPVD);
Módulo 4 - Comunicação Serial (MCS).
Na figura 4.18 observa-se a relação entre os módulos (2, 3, 4) e a fonte de
alimentação principal (1) do MAMCEE.
Como pode ser observado na figura 4.18, o módulo 1 (fonte de alimentação e
referencia de dados) se relaciona com todos os demais módulos que constituí o
MAMCEE. Entende-se que a boa relação entre os módulos do MAMCEE esta
diretamente ligada a boa qualidade de suplemento de energia fornecido pelo módulo
apresentado pela figura 4.19.
4.3.1 MFARD
Nesta etapa será tratado do elemento fundamental para o funcionamento das
demais etapas do circuito MAMCEE. O circuito de alimentação como o próprio nome
diz, é a parte responsável em fornecer tensões de alimentação especifica para cada
módulo que compreenderá o circuito MAMCEE.
A figura 4.19 mostra o protótipo do circuito da fonte de alimentação do
MAMCEE em quatro partes de forma a facilitar o entendimento. O módulo do circuito
de alimentação e referencias de dados é um tipo de fonte de energia simétrica
baseado em retificadores de onda completa em ponte com filtros capacitivos C1 à
C16. Os filtros capacitivos são utilizados de maneira a garantir o bom funcionamento
da fonte de alimentação, evitando que haja o menor valor de ruído, o qual poderia
comprometer o funcionamento do microcontrolador.
Conforme pode ser observado, a figura 4.19 mostra os reguladores U2 e o U3
que fazem a simetria das tensões de +12 e -12 volts estabilizados necessário na
alimentação do módulo do circuito de coleta de dados e condicionamento dos sinais
elétricos. O regulador U1 estabiliza em 5 volts a tensão necessária aos módulos de
117
processamento e visualização dos dados e também ao circuito de comunicação com
sistema e aplicativos computacionais. A geração principal das tensões necessárias é
fornecida por um transformador de indução eletromagnético, mas também as
modernas fontes chaveadas com as mesmas características de saída satisfazem o
projeto.
Quadro 4.1 – Terminais do conector CN003 do MFARD
CN003
DESCRIÇÃO CONFIGURATIVA
1
Saída estabilizada de 5 Volts (5 Vcc)
2
Saída estabilizada de +12 Volts (+12 Vcc)
3
Saída estabilizada de -12 Volts (-12 Vcc)
4
Tensão de referencia do microcontrolador (Vref. micro) modo
econômico.
5
Saída de 5 Volts para o Black light do LCD
6
Massa ou Terra (GND) (referencia do circuito de alimentação)
Fonte: Elaborado pelo autor, 2012.
A função do transformador (TR1) é dada pelo fator TR1 que por sua vez
possui um enrolamento primário que recebe a tensão de entrada da rede, podendo
ser de 127 Volts ou 220 Volts conforme o tipo de serviço de fornecimento elétrico
local. Outra relação do TR1 é o seu secundário que através de seu núcleo e uma
proporção de enrolamento satisfazem tensões necessárias em sua saída. Como a
tensão necessária na indução de TR1 é alternada, sua saída secundária também
terá o mesmo formato de onda senoidal, porém com amplitude de tensões menores
satisfazendo os níveis de saídas relacionado no quadro 4.1.
A ponte retificadora (BR1) é responsável pela separação dos ciclos positivo e
negativo da corrente alternada no secundário do TR1 entre as extremidades dos
terminais de saída.
O terminal 4 do CFARD fornece como saída uma referência de tensão com
objetivo de informar ao microcontrolador o estado atual da fonte. Enquanto esse
terminal estiver fornecendo uma amostra de tensão positiva de +5 V, o CFARD
estará automaticamente carregando uma bateria (BAT1) de 12 Volts para casos de
118
falta de energia.
A falta da bateria não impede o funcionamento do MAMCEE, porém em
surtos ou falta de energia o MAMCEE poderá sofrer panes comprometendo o
armazenamento dos dados. Com o auxilio de BAT1 o MAMCEE não perceberá
variações ou interrupções mantendo a preservação dos dados. Outro detalhe
importante da linha do terminal 4 é a condição do microcontrolador perceber
ausência de tensão da rede e entrar em estado econômico. O modo econômico tem
como função desligar todos os circuitos que não serão utilizados durante a falta de
energia, tais como: Black light do LCD e MCCSE preservando o consumo
desnecessário de corrente de BAT1.
O terminal 5 fornece como saída uma tensão de +5 Volts para a luz de fundo
(Black light) do LCD. Em modo econômico essa tensão estará ausente e a luz de
Black light permanecerá apagada poupando o consumo de corrente da bateria.
4.3.2 MCCSE
Nesta etapa do projeto trata-se de dois circuitos importantes na aquisição de
sinais elétricos. A eletricidade é uma força composta de corrente e tensão conhecido
por diferença de potencial necessário para o funcionamento de eletrodomésticos em
geral, pois para que essa força seja aproveitada em instrumentos de medição na
finalidade de obtenção de valores, essa mesma proporção ligada diretamente
queimaria o dispositivo MAMCEE. Para resolver esse problema é justificável a
existência de dois circuitos: o Circuito de Condicionamento da Tensão (CCT)
conforme figura 4.20 e o Circuito de Condicionamento da Corrente (CCC)
apresentado pela figura 4.21. Os níveis lidos pelos sensores serão condicionados
em níveis de tensões relativos aos medidos e entregues a níveis compatíveis para o
ADC do microcontrolador.
Os sinais elétricos são replicas exatas em menor amplitude e tratados
separadamente por cada um dos circuitos específicos.
Faz-se necessário o
nivelamento dos sinais gerado pelo sensor até a etapa de processamento, pois o
módulo MPVD trabalha com tensões limitadas em 5 Volts. Desta forma o módulo
CCT e CCC são calibrados individualmente para que a tensão de saída esteja em
uma escala menor, porém idêntica a tensão encontrada na rede elétrica.
119
4.3.3 MPVD
Figura 4.20 – Esquema CCT: Condicionador de tensão
Fonte: Elaborado pelo autor, 2012.
120
Figura 4.21 – Esquema CCC: Condicionador de corrente
Fonte: Elaborado pelo autor, 2012.
121
Figura 4.22 – MPVD – Visualização e processamento dos dados
Fonte: Elaborado pelo autor, 2012.
122
Figura 4.23 – MPVD: Referencia de tensão ADC
Fonte: Elaborado pelo autor, 2012.
123
O módulo MPVD é a etapa responsável em converter e gerir todas as
informações de entrada lidas pelos sensores, uma vez condicionado pelo módulo
MCCSE. Outra característica do módulo MPVD é apresentar em tempo real todo o
processo dedicado pelo MAMCEE e disponibilizá-los em forma de dados visuais e
entendíveis aos olhos humanos.
Na concepção da distribuição em módulos do projeto MAMCEE, a dedicação
e o relacionamento processual compõem a principal etapa a ser elaborada. Um
programa principal (Firmware) contido no microcontrolador possui todos os dados
referentes à metodologia dos objetivos proposto pelo MAMCEE. A figura 4.22 e 4.23
em sequência mostra o circuito de processamento e visualização do MAMCEE.
4.3.4 MCS
Figura 4.24 – Circuito de comunicação serial
Fonte: Elaborado pelo autor, 2012.
124
Na diversidade tecnológica não teria o menor sentido os dispositivos de
aquisição de dados para aplicativos de monitoria e bancos sem a flexibilidade
desses dados serem trocados entre si. Com a possibilidade de envio e recebimento
de dados os dispositivos diversos são acrescentados com recursos que desprendem
de forma a agregar grandes sistemas de informação.
Com a comunicação de dados através de protocolos de comunicação serial,
foram possível a interação entre dispositivos ganhando cada vez mais o mercado de
eletrônicos empenhados a gerar informações que valorizam processos
e
confiabilidade humana. Na figura 4.24 é apresentado o módulo de comunicação
serial (MCS) parte do MAMCEE que possibilita a troca de informações com sistemas
computacionais.
4.4 CONFIGURAÇÕES DE HARDWARE
Quadro 4.2 – Configuração dos pinos PIC16F877A
PIC 16F877A
Pino
Configuração do projeto
1
Entrada de reset via hardware
11
Entrada positiva da fonte de alimentação (5 Vcc)
12
Entrada negativa da fonte de alimentação (GND)
13
Entrada – Cristal oscilador
14
Saída – Cristal oscilador
31
Entrada negativa da fonte de alimentação (GND)
32
Entrada positiva da fonte de alimentação (5 Vcc)
Fonte: Elaborado pelo autor, 2012.
Quadro 4.3 – Configuração dos pinos de entrada ADC.
PIC 16F877A
Pino
Configuração de projeto
2
3
4
5
Entrada do sinal de tensão elétrica
Entrada do sinal de corrente elétrica
Entrada de tensão referencia mínima de 2,5V (REF-)
Entrada de tensão referencia máxima de 4,5V (REF+)
PORTA
RA0
RA1
RA2
RA3
Fonte: Elaborado pelo autor, 2012.
O PIC 16F877A esta configurado de forma a satisfazer as necessidades do
projeto MAMCEE. A configuração é conforme conveniências descritas nos quadros
4.2 a 4.11.
125
Quadro 4.4 – Configuração do pino de controle sonoro.
PIC 16F877A
Pino
Configuração de projeto
PORTA
6
Não configurado
RA4
7
Saída de frequência audível (1khz) 50ms
RA5
Fonte: Elaborado pelo autor, 2012.
Quadro 4.5 – Configuração do teclado.
PIC 16F877A
33
1
0
0
0
0
0
0
RB0
34
0
1
0
0
0
0
0
RB1
35
0
0
1
0
0
0
0
RB2
Pinos
36
37
0
0
0
0
0
0
1
0
0
1
0
0
0
0
RB3
RB4
38
0
0
0
0
0
1
0
RB5
39
0
0
0
0
0
0
1
RB6
40
1
1
1
1
1
1
1
Função
Função
Tecla auxiliar
Limpa valor da variável
Incrementa valor de variável
Decrementa valor de variável
Retorna para tela inicial
Rolar telas de configuração
Rolar telas de serviços
+5 V
PORTB
Símbolo
F1
LIMPAR
INC
DEC
ESC
SET
MENU
Teclado
Fonte: Elaborado pelo autor, 2012.
Quadro 4.6 – Configuração de controle display LCD.
PIC 16F877A
Pino
Configuração de projeto
8
Seleção de instrução ou dados – RS
9
Habilitação do LCD – E
10
Seleção de leitura ou escrita do LCD – RW
Fonte: Elaborado pelo autor, 2012.
PORTE
RE0
RE1
RE2
Quadro 4.7 – Configuração de controle BCD.
PIC 16F877A
Pino
Configuração de projeto
15
Saída de pulso para acionamento do LED piloto
16
Saída de controle para o Display BCD unidade
17
Saída de controle para o Display BCD dezena
18
Saída de controle para o Display BCD centena
23
Saída de controle para o Display BCD unidade de milhar
24
Saída de controle para o Display BCD dezena de milhar
Fonte: Elaborado pelo autor, 2012.
PORTC
RC0
RC1
RC2
RC3
RC4
RC5
Quadro 4.8 – Configuração de comunicação serial RS232.
PIC 16F877A
Pino
Configuração de projeto
25
26
Transmissão de dados serial (TX)
Recepção de dados serial (RX)
Fonte: Elaborado pelo autor, 2012.
PORT
C
RC6
RC7
126
Quadro 4.9 – Configuração de comunicação com o LCD.
PIC 16F877A
Pino
Configuração de projeto
19
20
21
Barramento de dados
22
Bit 0-7
27
28
29
30
Fonte: Elaborado pelo autor, 2012.
PORTD
RD0
RD1
RD2
RD3
RD4
RD5
RD6
RD7
4.5 DESENVOLVIMENTOS DO FIRMWARE
O que seria dos computadores sem o Basic Input Output System (BIOS)
diretamente gravados no hardware. Na eletrônica e na computação o firmware é o
conjunto de instruções lógicas operacionais que gravados em um chip ou circuito
integrado programavél possibilita o seu funcionamento corforme instruções prédefinidas que podemos considera-los como dispositivos dedicados.
Quadro 4.10 – Algoritmo básico do MAMCEE.
1
Ler a tensão da rede elétrica
2
Ler a corrente de fluxo da rede elétrica
3
Calcular a potência elétrica instantanea
4
Dividir a potencia instantanea por 3600 extrai uma parte e acumular a cada
segundo
5
Guardar os dados em memória
6
Mostrar os valores no display LCD
7
Caso haja solicitação enviar os dados pela porta serial
Fonte: Elaborado pelo autor, 2012.
Nesta etapa do trabalho é abordado desde a escrita do código do firmware a
ser gravado no microcontrolador quanto a simulação prevista com carga real. As
regras seguem conforme os valores da tensão da rede local e características
funcionais do sensor utilizado na implementação do MAMCEE. O algoritmo que
baseou a escrita do firmware esta descrito no quadro 4.11, sendo o MAMCEE um
dispositivo de aquisição de dados com rotinas pré-definidas.
O firmware do MAMCEE foi desenvolvido com a utilização da linguagem de
programação
C
padrão
ANSI
e
características
próprias
funcionais
do
microcontrolador PIC. O compilador utilizado no desenvolvimento do firmware foi o
127
compilador mikroC para PIC versão 8.2 portátil. O firmware implementado preencheu
83% da memória de programa interna do microcontrolador e a memória RAM foi
locada com as variáveis utilizada pelo firmware em 78% conforme pode ser
observado na figura 4.25.
Figura 4.25 – Estatística da locação de memória do PIC
Fonte: Mikroc, 2008.
A função principal garante a precisão do MAMCEE na medição do kWh. É a
função interrupt( ) que esta ligada diretamente a chamada do TMR0 do
microcontrolador.
Essa função tem por objetivo executar a cada segundo a
chamada das rotinas que farão a captura do ADC correspondente à tensão e a
corrente elétrica mensurada pelos sensores correspondentes. A variável flag_UI é
carregada com valor 1 que provoca a entrada do fluxo de programa na rotina
lerTensao( ) e lerCorrente( ) que por sua vez calcula a amostra de tensão e de
corrente elétrica usado na obtenção da potência elétrica instantânea que
posteriormente será fragmentada pela função ligada ao TRM0.
//Função para tratamento Timer0
void interrupt() //Inicio da rotina
{
cnt++; // incrementa variável de contagem
TMR0L
= 0;
128
INTCON = 0x20;// Seta T0IE, e limpa a flag do estouro do
// TMR0 = T0IF
if (cnt == 857)
{
flag_UI = 1; //bandeira de chamada da rotina ADC
contador++;
Segundo++;//contador do relogio
//Pth = 1;
//PORTC.F1 = ~PORTC.F1;
cnt = 0;
watt = (potencia/3600); //fragmenta a potencia
//acumula os fragmentos para compor o kWh
watt_s = watt_s +(potencia/3600);
//-----------------------------------------------------------//formatação de saida em LCD conversão decimal em float
acum[0] =
(watt_s/1000000000);
acum[1] = (watt_s/10000000)%10;
acum[2] = (watt_s/1000000)%10;
acum[3] = (watt_s/100000)%10;
acum[4] = (watt_s/10000)%10;
acum[5] = (watt_s/1000)%10;
acum[6] = (watt_s/100)%10;
acum[7] = (watt_s/10)%10;
acum[8] = watt_s%10;
//-----------------------------------------------------------PORTC.f0 = ~PORTC.F0;
// troca estado do RD0
//---------Formatação de saida no LCD
cont[0] = (contador/1000);
cont[1] = (contador/100)%10;
cont[2] = (contador/10)%10;
cont[3] = contador%10;
//-----------------------------------------------------------if (contador == 30) //teste de envio de dados pela
129
// porta serial
{
FlagUsart = 1;
//bandeira de chamada da rotina
// USART
contador = 0;
//zera o contador
}
}
} //Fim da rotina
Os principais dados necessários ao cálculo da potência elétrica consumida
são obtidos através das rotinas de captura ADC. O seu código pode ser entendido
conforme os códigos a seguir. A rotina empenhada em tratar os sinais de tensão e
corrente possui tratamento de maneira a obter o valor médio da variável ADC.
//-----------------------------------------------------------void lerTensao()//ler ADC correspondente a tensão elétrica
{
ADCON1 = 0b00000100;//habilita canal A/D0, A/D1 e A/D3 do
// PIC
TRISA = 0b00001111;//define pinos como entrada
TRISC = 0b11111000;//configura RC3-RC7 entradas e RC0-RC2
// saídas
delay_ms(20);
do{
UI = ADC_read(0);// obter o valor da ADC segundo
// canal
// UI = 0 - 1024
UI =(UI*5000/1023);
VSM = VSM + UI;
x++;
}while(x<10);
x = 0;
130
VSM = (VSM / 142)*10;
tensao = VSM;
//tensao recebe sinal medio
//formatação de saida em LCD
V[0]=(VSM/1000);
V[1]=(VSM/100)%10;
V[2]=(VSM/10)%10;
V[3]=(VSM%10);
if(tensao >= 2500) Sound_Play(1000, 50);
if(tensao <= 2080) Sound_Play(1000, 50);
}
//------------------------------------------------------------
O valor do ADC é lido dez vezes tirando a sua média, esse tratamento é
necessário por capturar valores instáveis, ou seja, variando no tempo sessenta
vezes por segundo (60/s) e mesmo sendo condicionada a um ganho e estabilidade,
a pureza do sinal nunca é cem por cento, motivo este causado pela alta velocidade
do microcontrolador sensível a pequenas ações.
//-----------------------------------------------------------void lerCorrente()//ler ADC correspondente a corrente elétrica
{
ADCON1 = 0b00001101;//habilita canal A/D0, A/D1 e
// A/D3 do PIC
TRISA = 0b00001111;//define pinos RA0 - RA4 como
// entrada e RA5 - RA7 saídas
TRISC = 0b11111000;//configura RC3-RC7 entradas e RC0// RC2 saídas
delay_ms(10);
do{
UI = ADC_read(1); // obter o valor da ADC segundo
// canal UI = 0 - 1024
UI =(UI*1955)/40; //1.955 - 0.040
ISM = ISM + UI;
131
x++;
delay_ms(10);
} while(x<10);
x = 0;
ISM = ISM/10;
corrente = ISM;
//corrente recebe sinal medio
//formatação de saida em LCD
I[0]=(ISM/100000);
I[1]=(ISM/10000)%10;
I[2]=(ISM/1000)%10;
I[3]=(ISM/100)%10;
I[4]=(ISM/10)%10;
I[5]=(ISM%10);
}
//------------------------------------------------------------
Durante o processo, alguns dados devem ser guardados e para isso é
necessário à utilização da memória EEPROM de forma a preservar os dados na
hipótese de falta de eletricidade. A principio para compensar espaço na memória de
programa à implementação da rotina de gravação dos dados na EEPROM fica
apenas para a memória interna do microcontrolador, por consequência esse tipo de
implementação torna arriscada e a perda definitiva dos dados armazenados caso o
microcontrolador venha a queimar. A solução mais segura para a preservação dos
dados caso haja a necessidade da troca do microcontrolador é a utilização de
memória EEPROM externa. O código a seguir mostra a rotina implementada para
escrita dos dados na memória do PIC.
//-----------------------------------------------------------case 5://mostra mensagem e grava os novos dados na memória
{
//chama rotina de mensagem
Msg1();//Msg ="atualizando a memoria...."
132
//-----------------------------------------------------------Eeprom_Write(0x00, 0); delay_ms(20);
Eeprom_Write(0x01, 0); delay_ms(20);
Eeprom_Write(0x02, 0); delay_ms(20);
//-----------------------------------------------------------Eeprom_Write(0x00, COFINS[0]); delay_ms(20);
Eeprom_Write(0x01, COFINS[1]); delay_ms(20);
Eeprom_Write(0x02, COFINS[2]); delay_ms(20);
//-----------------------------------------------------------Eeprom_Write(0x03, 0); delay_ms(20);
Eeprom_Write(0x04, 0); delay_ms(20);
Eeprom_Write(0x05, 0); delay_ms(20);
//-----------------------------------------------------------Eeprom_Write(0x03, PIS[0]); delay_ms(20);
Eeprom_Write(0x04, PIS[1]); delay_ms(20);
Eeprom_Write(0x05, PIS[2]); delay_ms(20);
//-----------------------------------------------------------Eeprom_Write(0x12, 0); delay_ms(20);
Eeprom_Write(0x13, 0); delay_ms(20);
Eeprom_Write(0x14, 0); delay_ms(20);
Eeprom_Write(0x15, 0); delay_ms(20);
//-----------------------------------------------------------Eeprom_Write(0x12, ICMS[0]); delay_ms(20);
Eeprom_Write(0x13, ICMS[1]); delay_ms(20);
Eeprom_Write(0x14, ICMS[2]); delay_ms(20);
Eeprom_Write(0x15, ICMS[2]); delay_ms(20);
//-----------------------------------------------------------Eeprom_Write(0x06, 0); delay_ms(20);
Eeprom_Write(0x07, 0); delay_ms(20);
Eeprom_Write(0x08, 0); delay_ms(20);
//-----------------------------------------------------------Eeprom_Write(0x06, pmKWh[0]); delay_ms(20);
Eeprom_Write(0x07, pmKWh[1]); delay_ms(20);
Eeprom_Write(0x08, pmKWh[2]); delay_ms(20);
133
Lcd_custom_Cmd(Lcd_CLEAR); // apaga display
//-----------------------------------------------------------Msg2();//Msg ="gravado com sucesso!"
Lcd_custom_Cmd(Lcd_CLEAR); // apaga display
set = 6; //passa para o proximo parametro
}
break;
//------------------------------------------------------------
Com os dados salvos em memória, sempre que haja um reset ou reinicio do
sistema microcontrolado, a forma de recuperar os dados da memória EEPROM
interna do microcontrolador se dá através do seguinte código.
void recDadosEeprom()
{
//recupera tarifa do COFINS a partir da Eeprom
COFINS[0] = Eeprom_Read(0x00); delay_ms(20);//centena
3xx
COFINS[1] = Eeprom_Read(0x01); delay_ms(20);//dezena
x2x
COFINS[2] = Eeprom_Read(0x02); delay_ms(20); //unidade xx1
//COFINS[3] = 0; COFINS[3] = Eeprom_Read(0x1A);
//COFINS[4] = 0; COFINS[4] = Eeprom_Read(0x1B);
tarC = ((COFINS[0]*100)+(COFINS[1]*10)+(COFINS[2]*1));
//-----------------------------------------------------------//recupera tarifa do PIS a partir da Eeprom
PIS[0] = Eeprom_Read(0x03); //centena
3xx
PIS[1] = Eeprom_Read(0x04); //dezena
x2x
PIS[2] = Eeprom_Read(0x05); //unidade
xx1
//PIS[3] = 0; PIS[3] = Eeprom_Read(0x1A);
//PIS[4] = 0; PIS[4] = Eeprom_Read(0x1B);
//-----------------------------------------------------------//recompoem o valor do tarP fragmentado em unidades de oito
134
bits
tarP = ((PIS[0]*100)+(PIS[1]*10)+(PIS[2]*1));
//-----------------------------------------------------------//recupera tarifa do KWh a partir da Eeprom
pmKWh[0] = Eeprom_Read(0x06); delay_ms(20); //centena
3xx
pmKWh[1] = Eeprom_Read(0x07); delay_ms(20); //dezena
x2x
pmKWh[2] = Eeprom_Read(0x08); delay_ms(20); //unidade
xx1
//pmKWh[3] = 0; pmKWh[3] = Eeprom_Read(0x1A);
//pmKWh[4] = 0; pmKWh[4] = Eeprom_Read(0x1B);
VKWh = ((pmKWh[0]*100)+(pmKWh[1]*10)+(pmKWh[2]*1));
//-----------------------------------------------------------//recupera valor de medição do KWh a partir da Eeprom
KW[0] = Eeprom_Read(0x17); delay_ms(20); //dez milhar 5xxxx
KW[1] = Eeprom_Read(0x18); delay_ms(20); //uni milhar x4xxx
KW[2] = Eeprom_Read(0x19); delay_ms(20); //
centena xx3xx
KW[3] = Eeprom_Read(0x1A); delay_ms(20); //
dezena
KW[4] = Eeprom_Read(0x1B); delay_ms(20); //
unidade xxxx1
xxx2x
//-----------------------------------------------------------//recompoem o valor do kilowatt fragmentado em unidades de
//oito bits
KWh =
((KW[0]*10000)+(KW[1]*1000)+(KW[2]*100)+(KW[3]*10)+(KW[4]*1));
//-----------------------------------------------------------ICMS[0] = Eeprom_Read(0x12);
delay_ms(20);
ICMS[1] = Eeprom_Read(0x13);
delay_ms(20);
ICMS[2] = Eeprom_Read(0x14);
delay_ms(20);
ICMS[3] = Eeprom_Read(0x15);
delay_ms(20);
//-----------------------------------------------------------Aliquota =
((ICMS[0]*1000)+(ICMS[1]*100)+(ICMS[2]*10)+(ICMS[3]*1));
//-----------------------------------------------------------}
135
A tecla responsável em chamar as telas sequentes de monitoramento é a
MENU. Cada acionamento dessa tecla causa a mudança das telas existentes nesse
seguimento. A tecla responsável em chamar as telas sequentes de configuração é a
SET. Cada acionamento dessa tecla causa a mudança das telas existentes nesse
seguimento. A tecla ESC é responsável em cancelar e retornar a tela principal de
qualquer posição de tela existente. As teclas de incremento (INC) e decremento
(DEC) possui funcionalidade somente para as telas de configuração podendo
aumentar ou diminuir o valor existente na tela de configuração atual. No mesmo
seguimento de telas de configuração caso haja necessidade de limpar o valor para
começar a configuração do zero, utiliza a tecla LIMPAR. A tecla F1 serve para zerar
o valor do contador do kWh que funcionará somente apertada simultaneamente com
a tecla LIMPAR.
Após o desenvolvimento do firmware e a sua compilação é utilizado o
software Microchip – MPLAB versão 7.0 para transferi-lo para o microcontrolador
juntamente com um hardware específico que faz a conexão entre o software e o
hardware através de uma porta disponível no computador.
Para simulação e testes do MAMCEE foram utilizados os softwares Isis
Professional Desgned Suite, para desenho do circuito elétrico; Ares Professional
PCB LAYOUT da Labcenter Electronics para o desenho do PCI; e MikroC
compilador para PIC da Mikro Eletrônica (MikroE) para escrita do codigo fonte em
linguagem C.
O diagrama de telas apresentado na figura 4.26 mostra a tela principal e seus
dois seguimentos de telas, de monitoramento e configuração dos dados existente no
MAMCEE. A tela principal tem ligação direta com as telas de monitoramento e
configuração. O teclado de seis teclas é o responsável pelo envio de comandos ao
microcontrolador de maneira a executar funções pré-programadas via software.
Na tela apresentada pela figura 4.26 o display LCD mostra as seguintes
informações monitoradas: tensão elétrica da rede (U:); fluxo de corrente elétrica na
rede (I:); potência elétrica instantania absorvida pela rede elétrica (P(t)); acumulador
da potencia fragmentada em um segundo (Acu:); quilo watts hora consumido (kWh)
e contador de hora. A tela principal do MAMCEE em simulação mostra o processo
aritimétrico interno calculado pelo microcontrolador. Como pode observar, a
simulação apresenta uma tensão virtualizada de 221 V, com corrente de fluxo de
136
1.519 mA e a potência instantanea resultante de 335.699 mW.
Figura 4.26 – Telas de monitoramento e Configuração
Fonte: Isis, 2010, adaptado pelo autor.
137
Figura 4.27 – Simulação com fluxo de I= 1.519A durante 1 hora
Fonte: Isis, 2010, adaptado pelo autor.
Os valores apresentados pela figura 4.27 foram submetidos em regime
constante durante uma hora de simulação, com o objetivo de analizar e comprovar
que o consumo de energia em uma hora é o resultado das somatorias de watts
fragmentados em 3600 partes e acumulados durante esse mesmo tempo. Com a
somatória dos fragmentos da potência elétrica obtém o valor total instantâneo
absorvido (P(t)). Após 1 hora de monitoramento simulado pelo MAMCEE o relatório
de dados da figura 4.28 apresenta a transferência pela porta serial a cada 5 minutos.
Figura 4.28 – 1º Relatório transmitido pela serial
Fonte: Elaborado pelo autor, 2012.
Note na figura 4.27 que os valores obtidos com a simulação parcial em 50%
do tempo esperado, ou seja, com 30 minutos de simulação o valor acumulado dos
fragmentos (Acu) apresenta o valor de 167.661 mW que em comparação com o
valor da potência instantânea (P(t)) total é a sua metade. A simulação na sua etapa
final com duração de 1 hora pode confirmar que o acúmulo da potência fragmentada
durante 1 hora é igual a potência instantânea (P(t)) total apresentada na simulação.
Durante o tempo total de simulação por causa da potência elétrica absorvida durante
138
1 hora não superar os 1000 Watts (1kw) não houve o incremento do kWh de forma a
continuar desde o inicio em zero.
Figura 4.29 – Simulação com fluxo de I= 25.685A
Fonte: Isis, 2010, adaptado pelo autor.
Na simulação inicial da figura 4.29 a corrente emulada foi de 25 A constante
resultando em uma potência instantânea de 5.675.722 mW. Após uma hora de
simulação pode ser observado que o kWh obteve cinco incrementos em razão da
potência instantânea ser de 5000 watts e os 675 Watts restantes fica
momentaneamente ignorado até que atinja os próximos 1000 Watts. A figura 4.30
mostra o relatório medido durante 1 hora e enviado pela porta serial.
Figura 4.30 – 2º Relatório transmitido pela serial
Fonte: Elaborado pelo autor, 2012.
Com o consumo registrado durante a simulação pode também ser calculado o
consumo por hora, dia e mês baseando pela potência instantânea, e obter o valor
em reais com seus devidos impostos, a figura 4.31 apresenta os dados de acordo
com as telas de monitoramento [2] e [3].
139
Figura 4.31 – Configurações com dados da conta de luz
Fonte: Isis, 2010, adaptado pelo autor.
A tela de faturamento do consumo traz o valor da tarifa conforme discriminada
pela conta de luz fornecida pela CPFL. O kWh é o valor medido durante a simulação.
O valor do preço médio (PVm) é o valor do kWh corrigido conforme as taxas e
impostos PIS/PASEP e COFINS da conta de luz que multiplicado pelo valor do kWh
resultará no valor do faturamento (Ftr) a ser pago pelo consumidor. A figura 4.32
mostra os dados reais da conta de luz de um consumidor padrão monofásicos
baseados para configuração do MAMCEE.
Figura 4.32 – Conta de um padrão monofásico
Fonte: Elaborado pelo autor, 2012.
O MAMCCE possui também outra funcionalidade que é o alerta de acordo
com o consumo previsto pelo consumidor. A tela [4] é a responsável em mostrar
essa informação conforme pode ser observado na figura 4.33.
Os resultados foram alcançados conforme as expectativas, visto que há tipos
de interface com o mesmo propósito do projeto MAMCEE, porém são ferramentas
de alto custo aplicadas somente no monitoramento de indústrias e setores
energéticos.
140
Figura 4.33 – Tela [4]: Previsão de consumo
Fonte: Isis, 2010, adaptado pelo autor.
Na busca de melhoria e geração de energia ecologicamente correta, o
desenvolvido do MAMCEE foi feito com tecnologias de fácil aquisição com baixo
custo de investimento e totalmente brasileira. O quadro 4.12 mostra o custo total
aplicado para o desenvolvimento do dispositivo MAMCEE.
Quadro 4.11 – Custo desenvolvimento MAMCEE
Item
Módulos
Valor
01
MPVD
125,00
02
MCS
35,00
03
CCT
25,00
04
CCC
60,00
05
MFARD
65,00
Custo Total
310,00
Fonte: Elaborado pelo autor, 2012.
Na etapa simulada, o MAMCEE apresentou aspectos funcionais esperados e
trouxe resultados positivo observados em telas LCD.
As variações do sinal de
tensão e de corrente foram obtidas através de técnicas utilizando simulações com
resistores variáveis respeitando escala definida e suportada pelo micro PIC. Com a
simulação foi possível analisar variações de corrente parecidas com as encontradas
141
em um padrão de fornecimento de energia residencial e analisar seu consumo em
diferentes situações como: hora, dia e mês conforme simulação apresentada pela
figura 4.34.
Figura 4. 34 – Previsão de consumo simulado
Fonte: Isis, 2010, adaptado pelo autor.
Figura 4.35 – Protótipo em experimento
Fonte: Isis, 2010, adaptado pelo autor.
142
Figura 4.36 – LCD com mensuração em repouso
Fonte: Elaborado pelo autor, 2012.
Figura 4.37 – LCD em plena mensuração
Fonte: Elaborado pelo autor, 2012.
Figura 4.38 – Mensagem de envio de dados
Fonte: Isis, 2010, adaptado pelo autor.
143
As dificuldades encontradas foram em simular o funcionamento com os
próprios sensores de corrente aplicado no projeto físico. A falta de prática e
conhecimento mais refinado do sensor dificultou a escrita de um algoritmo mais
preciso. Outro problema encontrado foi a incompatibilidade da resolução do sensor
de corrente ACS em relação a resolução binária do PIC utilizado. Na etapa em que
os experimentos foram realizados fisicamente foi possível analisar as diferenças de
um projeto teórico e o prático, tendo em vista a necessidade de equipamentos
específicos na calibração e referência das informações. A maior satisfação deste
trabalho foi poder coletar as informações elétricas e transforma-las em dados digitais
para possível alimentação de tabelas em um banco de dados que sugere-se a
implementação futura. As figuras 4.35 a 4.37 demostram os resultados alcançados
durante a evolução e simulação do MAMCEE. Na figura 4.38 pode-se verificar a
mensagem de transmissão de dados pela porta serial a cada 30 segundos podendo
ser modificada conforme a necessidade do aplicativo em sincronia.
4.6 MODELAGEM DE DADOS
Figura 4.39 – Diagrama entidade relacionamento
Fonte: Elaborado pelo autor.
144
Na proposta desenvolvida de uma interface de aquicição de dados e com a
possibilidade de aproveitar as informações coletados em analises e geração de
relatórios, sugere que trabalhos futuros possam desenvolver aplicativos destinados a
receber esses tipos de dados e armazená-los em banco. A figura 4.39 ilustra o
diagrama de entidades e relacionamentos.
145
CONCLUSÃO
Em vista da grande evolução tecnológica e com o crescimento da informática
atingindo o vasto campo da eletrônica, é certo que profissionais do setor
eletroeletrônico queiram aprofundar no mercado. Atualmente cresce a cada dia a
disseminação de componentes programáveis e aplicativos dedicados a essa
tecnologia, tornando favorável seu estudo por alunos de tecnologia que queiram
conhecer melhor este nicho.
Com aproveito do conhecimento cientifico e a
preocupação do setor elétrico brasileiro em buscar alternativas de geração de
energia e outras formas de venda como os pré-pagos, a fomentação de tecnologias
voltada para esse propósito torna bastante favorável.
Com o desenvolvimento do MAMCEE foi possível sentir as dificuldades para
desenvolver sistemas embarcados, dentre as dificuldades, pode-se citar as
limitações do uso de memória, armazenamento e processamento; uso de variáveis
de valor inteiro ao invés de variáveis com ponto flutuante; falta de experiência neste
tipo de implementação, principalmente os problemas encontrados para o ajuste de
frequência do cristal no valor máximo permitido pelo microcontrolador (20 MHz) em
sua primeira versão e que não obteve bom resultado, com ajustes em sua
implementação foi obtido bom desempenho do processador e com uma frequência
de oscilador bem baixa (4 MHz).
Outra situação problema encontrada durante o desenvolvimento foi à
limitação do PIC16F877 em relação a sua memória de programa, sendo necessário
escolher outro microcontrolador com compatibilidade de hardware idêntica com
maior espaço de memória de programa. O microcontrolador encontrado e escolhido
para receber o upgrade de hardware foi o PIC18F452 com mesma característica
física e tendo o dobro da capacidade de memória de programa satisfatório ao
projeto.
Devido a diversidade de sensores de corrente e disponibilidade no mercado, é
preciso maior tempo e disponibilidade para avaliar o melhor de acordo com a
aplicação do MAMCEE. Há possibilidade de possíveis adaptações e evolução no
projeto atual e podendo até mesmo dedicar o MAMCEE a monitoramento de outros
padrões de energia, como o bifásico e trifásico.
Os medidores antigos analógicos residenciais já estão sendo substituídos por
146
digitais. A grande viabilidade do MAMCEE seria o estudo evolutivo no conceito de
medidores com tecnologias modernas e a possibilidade de monitoramento em tempo
real por meio da WEB. Com essa nova perspectiva o usuário poderia monitorar seu
estabelecimento ou residência de longa distância.
Atualmente as concessionárias utilizam um moderno equipamento portátil que
de acordo com os dados do cliente e o consumo atual em kWh gera e imprime
imediatamente, no ato da coleta dos dados, a conta ao consumidor. Entretanto, não
atende com automação os processos de desligamento e religamento por falta de
pagamento.
Uma proposta de trabalhos futuros seria a adaptação do MAMCEE por
concessionárias no monitoramento e controle automatizado de padrões de
fornecimento elétrico, tanto para desligamento por falta de pagamento quanto para o
restabelecimento do fornecimento de energia.
Outra aplicação do MAMCEE seria sua utilização por sistemas de hotelaria.
Instalado individualmente em cada apartamento mensura o gasto do cliente que
poderá pagar no ato do fechamento da estadia, sendo que o consumo de energia
elétrica é diferente para cada cliente que atualmente paga pelo mesmo preço
rateado independentemente do consumo. Qual seria o seu gasto real individual de
energia?
A simulação é a maneira mais barata e segura de desenvolvimento de
dispositivos complexos tanto para hardwares quanto softwares e foi de extrema
importância para a realização do projeto MAMCEE. Com a simulação via software foi
possível acompanhar em tempo real o consumo de energia elétrica consumida e o
consumo previsto durante uma hora, vinte e quatro horas e trinta dias com
antecedência o valor da conta.
A implementação deste trabalho possibilitou identificar a importância da
convergência de áreas para a implementação de projetos dessa natureza (Elétrica,
Eletrônica, e Computação) para o desenvolvimento de novos produtos.
147
REFERÊNCIAS BIBLIOGRÁFICAS
ALLEGRO. MicroSystems, Inc. Current Sensor ICs. Disponível em: <
http://www.allegromicro.com/en/Products/Sanken-Products.aspx>. Acesso em: 30
Nov. 2012.
BERTOLI, R. A. Departamento de Eletroeletrônica. 2000, 96p. Apostila da
disciplina de Eletrônica. Colégio Técnico de Campinas.
BOYLESTAD, R. L. Introdução à Análise de Circuito. Livro; 8° ed. Rio de Janeiro.
Editora Prentice – Hall do Brasil LTDA, 1998.
CEPA; Centro de Ensino e Pesquisa Aplicada. Livro eletrônico, 2007. Disponível
em:<http://efisica.if.usp.br/eletricidade/basico/pilha/pilha_volta/>. Acesso em: 18 Nov.
2010.
EE;
Energia
Renovável,
2010.
Disponível
em:
<http://energiarenovavel1.wordpress.com/>. Acesso em 05 DEZ. 2010.
GASPAR, A. Física. Volume único. 1° ed. São Paulo. Editora Ática, 2009.
INOVAÇÃO Tecnológica. Sistema de monitoramento do consumo de energia
evita sustos no fim do mês, 19 Abr. 2007. Disponível em:
<http://www.inovacaotecnologica.com.br/noticias/noticia.php?artigo=010115070419>
Acesso em: 09 Nov. 2010.
ISIS Professional. Datasheet. Disponível em: <http://downloads.labcenter.co.uk>.
Acesso em: 29 Set. 2010.
LIMA; E. S. Protótipo de Tarifador Digital de Energia Elétrica. 2007. Monografia
(Engenharia da Computação) - Universidade Católica de Goiás, Goiás.
MARKUS, O. Circuitos Elétricos - Corrente Continua e Corrente Alternada.
Livro; 1° ed. São Paulo. Editora Érica, 2001.
MELO, A. A. B.; PINHO, M. A História da Eletricidade. Trabalho Acadêmico sobre
Introdução
a
Engenharia
Elétrica,
2010.
Disponível
em:
<http://www.ebah.com.br/historia-da-eletricidade-pdf>. Acesso em: 10 Out. 2010.
MICROCHIP. Datasheet do Microcomtrolador PIC16F87X. Microchip Technology
Inc, 1999. Disponível em: <http://www.datasheetcatalog.com> Acesso em: 23 Mai.
2011.
MIKROC compiler for PIC V 8.2. MIkroElektronika, 2008. Disponível em:
<http://mikroe.com/pic/compilers> Acesso em: 30 Nov. 2012.
SAELPA. Sociedade Anônima de Eletrificação da Paraíba. Leitura Remota de
Consumo de Energia Elétrica e Medição Agrupada em Poste com Leitura
148
Eletrônica Utilizando-se Medidores Convencionais de Energia. Relatório Técnico
Parcial. Campina Grande, 2002.
SALMERON, R. A. Introdução à Eletricidade e ao Magnetismo. Livro; 4° ed. São
Paulo. Editora D. SALMERON C. Gomes, 1962.
SECON. Sensores e Instrumentos. Grupo de Produtos / Sensores de Corrente
AC/DC
(Efeito
Hall
Realimentado).
Disponível
em:
<
http://www.secon.com.br/grupo.php?grupo_id=14> Acesso em: 30 Nov. 2012.
SOFISICA.
Efeito
Hall.
Disponível
em:
<
http://www.sofisica.com.br/conteudos/Eletromagnetismo/CampoMagnetico/efeitohall.
php> Acesso em: 30 Nov. 2012.
SOUZA, D. J. Desbravando o PIC; 12° ed. São Paulo. Editora Érica, 2003.
TORRES, G. Fundamentos de Eletrônica. Livro; 1° ed. Rio de Janeiro. Editora
AXCEL Books, 2002.
WALTER, O. L. Historia da eletricidade: Apostila, 2009. Disponível
em:<http://www.univasf.edu.br/~edmar.../iee/1HistoriaEletricidade.pdf>. Acesso em:
24 Set. 2010.