FAAP – Faculdade Engenharia
Capítulo 1 - Análise Dimensional
Grandeza Física – é todo elemento suscetível de definição quantitativa,
convencionalmente introduzida com o objetivo de facilitar o estudo e a descrição de
um grupo de fenômenos físicos.
Toda grandeza física é concebida de uma operação bem definida, realizada em
laboratório ou em campo, a qual chamamos de medida.
Lei Física – é a descrição exata das relações de interdependência entre as
grandezas associadas a um dado fenômeno; sempre que possível ela é
representada por relações matemáticas entre símbolos que representam as
grandezas físicas.
Chega-se às leis físicas a partir de conhecimentos adquiridos anteriormente (método
racional ou por meio de observação e/ou experimentação/método).
Embora a Física se utilize de métodos matemáticos, estes entram como ferramenta
de trabalho ao lado da observação e da experimentação.
A Física não é uma disciplina matemática e muito menos construída sobre um
modelo matemático:
“é a ciência do estudo geral da matéria bruta, da energia e de suas
transformações, que se utiliza predominantemente do método experimental e
também do método dedutivo – matemático”
É, portanto uma CIÊNCIA EXPERIMENTAL.
Medição de uma grandeza física – “medir uma grandeza física significa compará-la
com outra da mesma espécie, denominada unidade”.
Assim sendo, para medirmos uma grandeza física devemos:
1º)
2º)
3º)
Eleger uma unidade de medida (quantidade da mesma espécie).
Comparar a grandeza física a ser medida, com a unidade eleita (quantas
vezes a grandeza a ser medida está contida ou contém a unidade eleita).
O resultado dessa comparação é a medida ou medição da grandeza física.
Exemplo:
Para medir a área de um terreno, devemos compará-la com uma unidade escolhida,
(quantidade da mesma espécie), no caso um quadrado de 1 m de lado, ou seja, de
1m2 de área (note que estamos comparando a grandeza física, área de um terreno,
com a unidade escolhida, que é um quadrado de área 1m2, portanto estamos
comparando quantidades da mesma espécie). O resultado dessa comparação é a
medida da grandeza física área. Se a unidade escolhida (quadrado de área 1m2)
coube 100 vezes dentro do terreno, o resultado 100 é a medida obtida; se o mesmo
coube 500 vezes dentro do terreno, a medida obtida será 500.
Código da Disciplina: 1EB176 – FÍSICA I
1
FAAP – Faculdade Engenharia
Resumindo: para medirmos uma grandeza física devemos.
a) Eleger uma unidade (QUANTIDADE DE ESPÉCIE)
b) Comparar a unidade escolhida com a grandeza a ser medida
c) Resultado da comparação = medida
Seja:
G: uma grandeza física qualquer
m: medida obtida
U: unidade escolhida, da mesma espécie de G.
Assim sendo, considere:
“G e G’ duas grandezas físicas da mesma espécie, cujas as medidas são “m e m’:
medidas realizadas num mesmo sistema de unidade U.
G m
G = m.U e G’ = m’.U. Se dividirmos uma pela outra, teremos:
=
G' m'
Esta expressão demonstra que a relação entre duas grandezas da mesma espécie,
independe da unidade de medida usada (caráter unívoco da medição).
A maioria das grandezas da mesma espécie satisfazem essa condição, que se
denomina “condição do significado absoluto do valor relativo”.
Significado Absoluto: porque independe da unidade.
Valor Relativo: porque trata da relação entre duas grandezas.
Exemplo: dizer que uma pressão é o triplo da outra, esta expressão independe das
unidades de medida.
Consideramos agora uma grandeza G, relativamente a duas unidades U e U’, com
medidas de m e m’, assim sendo, podemos escrever:
G = m.U
G = m’.U’. Se dividirmos uma expressão pela outra, teremos:
m U'
=
m' U
Nesta expressão, verificamos que a medida de uma grandeza varia inversamente
com a unidade adotada. Esta é chamada “Lei do Valor Inverso”.
Ou seja: “tomando-se uma unidade n vezes menor teremos uma medida n vezes
maior e reciprocamente”. Esta lei, também recebe o nome de: “Lei da Conversão
de Unidades”.
Sistema Internacional de Unidades – Foi em 1948 que a 9ª Conferência Geral de
Pesos e Medidas (CGPM), encarregou o Comitê Internacional de Pesos e Medidas
(CIPM) de:
“Estudar o estabelecimento de uma regulamentação completa das unidades de
medidas”.
Código da Disciplina: 1EB176 – FÍSICA I
2
FAAP – Faculdade Engenharia
Observação
Antigamente quase todas as unidades eram definidas de um modo arbitrário o que
levava a não existir nenhuma relação entre as unidades de um mesmo sistema. Isto
causava um sério problema, pois era necessário introduzir nas fórmulas físicas
coeficientes numéricos, denominados “coeficientes parasitas”, o que gerava os
chamados “Sistemas Incoerentes”, completamente fora de uso.
Hoje em dia, as unidades são definidas mediante as equações de definição.
O Sistema de Unidades estruturado desse modo recebe o nome de “Sistema
Coerente” que por sua vez é composto por unidades fundamentais.
A 10ª Conferência Geral de Peso e Medidas (1954), decidiu a adotar como unidades
fundamentais, as seguintes:
• comprimento
• massa
• tempo
• temperatura termodinâmica
• intensidade elétrica
• intensidade luminosa
• quantidade de matéria
A11ª Conferência Geral de Pesos e Medidas, adotou o nome de Sistema
Internacional de Unidades (SI), em 1960. A 14ª Conferência Geral de Pesos e
Medidas (1971), acrescentou a essas unidades fundamentais o mol como unidade
fundamental da grandeza quantidade de matéria. O SI foi adotado no Brasil em
1962.
Grandeza
• Comprimento
Sistemas de Unidades Fundamentais
Nome
Símbolo
metro
m
•
Massa
quilograma
kg
•
Tempo
segundo
s
•
Intensidade Elétrica
ampère
A
•
Intensidade Luminosa
candela
cd
•
Temperatura
kelvin
K
Termodinâmica
•
Quantidade de Matéria
mol
mol
Representação Escrita – O nome de qualquer grandeza física quando escrita por
extenso, é escrito com letra minúscula e leva s no plural. Exemplo:
segundo
segundos
joule
joules
watt
watts
Código da Disciplina: 1EB176 – FÍSICA I
3
FAAP – Faculdade Engenharia
O símbolo correspondente de uma das grandezas fundamentais, não corresponde a
uma abreviação, portanto, não leva ponto, nem “s” quando no plural. Exemplo:
1 segundo =
1s e não 1s.
10 watts
=
10 w e não 10ws.
100 metros =
100 m e não 100ms.
Algumas unidades têm nomes emprestados de físicos ilustres, portanto o símbolo
dessas unidades deve ser escrito em letra maiúscula. Exemplo:
newton
=
N
joule
=
J
hertz
=
Hz
henry
=
H
O produto de duas ou várias unidades é indicado por ponto como sinal de
multiplicação, que pode ser suprimido se não houver possibilidade de confusão.
N.m ou Nm e não mN
Na divisão usamos (/), barra inclinada, ou traço horizontal, ou potência negativa.
m
m/ s =
= ms −1
s
Nunca repetir na mesma linha mais de uma barra, a não ser com o auxilio dos
parênteses. Exemplo:
m / s 2 ou m.s -2 . e não m/s/s J/(mol.K) ou J.mol -1.K −1 e não J/mol/k
Teorema de Bridgman ou Princípio da Expressão Monômica – “Toda grandeza
física que satisfaz a condição de significado absoluto do valor relativo, pode ser
expressa pelo produto de um coeficiente numérico por outras grandezas físicas
elevadas a certos expoentes”.
Seja G uma grandeza física que depende das grandezas X, Y, Z, podemos,
baseados em Bridgman, escrever:
G = K.X x .Y y .Z z
Onde G = grandeza física que depende de outros X, Y, e Z; além disso, ela deve
obedecer a condição do significado absoluto do valor relativo.
K = número puro, também chamado de constante adimensional.
x,y,z = números positivos, negativos, inteiros ou fracionários, que recebem o nome
de dimensões.
Exemplos:
E c = f (m.v )
Ec =
1
.m.v 2
2
K=
1
2
T = f (L.g)
T=2
(L )
g
K=2
Código da Disciplina: 1EB176 – FÍSICA I
4
FAAP – Faculdade Engenharia
EQUAÇÃO DIMENSIONAL
Considere a grandeza G dependente das grandezas X,Y,Z, as unidades das
grandezas G,X,Y,Z são respectivamente U(G), U(X), U(Y), U(Z), em um sistema de
unidades S e U’(G), U’(X), U’(Y), U’(Z) em outro sistema de unidades S’.
Segundo Bridgman:
U(G) = U( X) x . U( Y ) y . U( Z) z
{ }{ }{ }
U' (G) = {U' ( X) }{
. U' ( Y ) }{
. U' ( Z) }
x
y
z
Dividindo membro a membro:
U(G) U( X) x U( Y ) y U( Z) z
.
.
=
U' (G) U' ( X) x U' ( Y ) y U' ( Z) z
Símbolo
Analogamente, símbolos dimensionais
dimensional
de X, Y e Z.
da grandeza
G. e representa-se
[G]
=
[X].[Y].[Z]
Representações Devidas a Maxwell:
[G]=[X]x.[Y]y.[Z]z
EQUAÇÃO DA GRANDEZA FÍSICA G EM RELAÇÃO AS GRANDEZAS X, Y E Z.
Numa equação dimensional, não podem aparecer coeficientes numéricos. Portanto:
“EQUAÇÃO DIMENSIONAL de uma grandeza física é a equação que relaciona o
símbolo dimensional da grandeza, com os símbolos dimensionais de outras
que a definem”.
DIMENSÃO: é qualquer um dos expoentes reais (x, y e z).
se x = 1, diz-se que G é diretamente proporcional a X.
se x = -1, diz-se que G é inversamente proporcional a X.
se x = -2, diz-se que G é inversamente proporcional ao quadrado de X.
se x = 1/2, diz-se que G é inversamente proporcional à raiz quadrada de X.
se x = 0, diz-se que a grandeza tem dimensão nula em relação a X.
Tabela das Grandezas Fundamentais do Sistema Internacional de Unidades (SI).
Grandeza Fundamental
Nome
comprimento
massa
tempo
intensidade elétrica
Intensidade luminosa
temperatura
termodinâmica
quantidade de matéria
metro
quilograma
segundo
ampère
candela
kelvin
Símbolo
Dimensional
L
M
T
I
J
θ
Mol
N
Código da Disciplina: 1EB176 – FÍSICA I
5
FAAP – Faculdade Engenharia
Grandezas adimensionais: são aquelas que têm dimensão nula em relação a
qualquer grandeza fundamental, ou seja, têm dimensão zero, ou seja, não sofrem
alteração, não são afetadas por mudança de sistemas de unidades: funções
trigonométricas, expoentes, logaritmos, coeficientes numéricos.
HOMOGENEIDADE DIMENSIONAL
Princípio da Homogeneidade
Segundo Fourier: “duas ou mais grandezas físicas são homogêneas entre si
quando têm equações dimensionais iguais”.
As equações físicas
homogeneidade.
são
necessariamente
homogêneas
–
Princípio
da
Estabelecimento de Equações Dimensionais.
G = grandeza física que é definida por outras grandezas A e B.
G = A .B
[G] = [A.B] = [A].[B]
A
[A]
G=
[G] = [A/B] =
B
[B]
e ainda
G=An
[G]=[An]=[A]n
As equações dimensionais dependem só da espécie da grandeza e não das suas
medidas.
Seguem alguns exemplos de estabelecimento de equações dimensionais:
1. Equação dimensional da grandeza área
área = A = a.b
[A] = [a].[b]
[A] = L.L
[A] = L2
Veja que a equação dimensional da grandeza área é sempre a mesma
independente da configuração.
Exemplo: equação dimensional da área de um circulo.
Área do circulo = π.R2 = A
[A] = [π].[R]2
[A] = L2
2. Equação dimensional da velocidade num movimento retilíneo e uniforme.
[ s] L
[v] =
= = LT −1
[ t] T
-1
LT = exprime que a grandeza velocidade é: diretamente proporcional à
grandeza fundamental comprimento (L) e inversamente proporcional à
grandeza fundamental tempo (T).
Código da Disciplina: 1EB176 – FÍSICA I
6
FAAP – Faculdade Engenharia
3. Equação dimensional da grandeza energia elétrica.
1
E = .m.v 2
2
[E] = [1/ 2].[m].[ v ] 2
[E] = [1/ 2][m]
[ s] 2
[t ] 2
[E] = M.
L2
T2
[E] = M.L2 .T −2
NOTE QUE PARA QUALQUER MODADALIDADE DE ENERGIA, A
EQUAÇÃO DIMENSIONAL É SEMPRE A MESMA.
Exemplo: Energia Potencial Gravitacional Ep = m.g.h
[Ep] = [m].[g].[h]
[v ]
.[h]
t
[s] /[ t ]
[Ep] = [m].
.[h]
[t]
L / T.L
[Ep] = M.
T
2
L
[Ep] = M. 2
T
[Ep] = M.L2 .T −2
[Ep] = [m].
Período (T) = é o tempo que se requer para a realização de um ciclo completo num
fenômeno periódico.
Freqüência (f) = freqüência de um fenômeno periódico é o número de ciclos
realizados por unidade de tempo:
1
f=
T
Vazão (∅) = representa o volume (V) de fluído escoado através de uma seção
transversal por unidade de tempo (t):
v
o/ = .
t
Força (F) = exercida em uma partícula, equivale ao produto da massa (m) da
partícula por sua aceleração (a):
F = m.a
Impulso (I) = impulso de uma força constante representa o produto da força (F) pelo
tempo (t) de ação desta:
I = F.t
Quantidade de movimento (q) = é o produto da massa (m) da partícula por sua
velocidade (v):
q = m.v
Pressão (p) = uniforme sobre uma superfície representa força (F) por unidade de
área (A):
F
p=
A
Código da Disciplina: 1EB176 – FÍSICA I
7
FAAP – Faculdade Engenharia
Trabalho (W) = realizado por uma força constante, é o produto da força (F) pelo
deslocamento (d) e pelo cosseno (θ) formado entre a força e o deslocamento:
W = F.d.cosθ
(Potência) = de um sistema em funcionamento uniforme, representa o trabalho (W)
realizado por unidade de tempo (t):
W
P
t
Constante elástica (k) = é o coeficiente de proporcionalidade entre a força (F)
aplicada em uma mola e a deformação linear (x) provocada:
F
F = K.x e k =
x
Momento de força (M) = (em relação a um ponto) é o produto da força (F) pelo
braço (b):
M = F.b
Massa específica (f) = de uma substância pura representa massa (m), por unidade
de volume:
m
f=
V
Densidade linear (µ) = de um fio – (para um fio homogêneo), representa massa (m)
por unidade de comprimento (L):
m
µ=
L
Densidade superficial (σ) = (de uma película homogênea), representa massa por
unidade de área (A):
m
σ=
A
Peso específico (w) = (de uma substância), representa peso (P) por unidade de
volume (V):
P
w=
V
Modulo de Young (E) = barra de comprimento L e secção transversal de área A,
quando sujeita à força longitudinal de tração, sofre deformação linear L; fenômeno é
regido pela lei de Hooke:
F.L
∆L =
A.E
Viscosidade dinâmica (η) = (de um fluído) é a resistência que ele apresenta ao
escoamento. As forças viscosas (F) que atuam em duas superfícies paralelas de
área A cada uma separadas pela distância h, que se movem com velocidades,
respectivamente v e v + v, têm intensidades:
η.A.v
F=
h
Viscosidade cinemática (ν) = é a relação entre a viscosidade dinâmica (η ) do
fluído e sua massa específica (ρ):
ν=
η
ρ
Código da Disciplina: 1EB176 – FÍSICA I
8
FAAP – Faculdade Engenharia
Tensão superficial (σ) = (de um líquido), é a relação entre a força (F) que
experimenta todo limite da película líquida e o comprimento (l) dessa película:
σ = F/L
Constante universal de gravitação (g) = duas massas m e m’ separadas pela
distância d, atraem-se mutuamente com força de intensidade F; o fenômeno é regido
pela lei de atração gravitacional de Newton:
G.m.m'
F=
d2
Constante universal dos gases (R) = comparece na equação de estado dos gases
perfeitos, equação de Clapeyron:
p.V = n.R.T
Massa molecular (M) = de uma substância, representa a massa (m) por mol:
m
M=
n
Ângulo plano (∅) = representa a relação entre o comprimento do arco (L) e o raio
(R) deste:
L
o/ =
R
Velocidade (v) = do movimento retilíneo uniforme representa o deslocamento (d)
por unidade de tempo (t)
d
v=
t
Velocidade angular (ω) = do movimento circular uniforme representa o ângulo
central de giro ( o/ ) por unidade de tempo (t):
o/
ω=
t
Aceleração (a) = do movimento retilíneo uniformemente variado representa a
variação da velocidade (v’-v) por unidade de tempo (t):
v '− v
a=
Estabeleça por contra própria, a equação dimensional das grandezas
t
relacionadas abaixo, em seguida preencha o quadro:
Grandeza fundam.
Repr.
Equação Dimensional
Unid.
SI
M
L
T
θ
N
-
-
-
-
-
-
Coef. numérico log.
expoentes, f. trigonom.
Superfície (área)
A
m2
Volume
V
m3
ângulo plano
θ
rad
velocidade
v
m/s
velocidade angular
ω
rad/s
aceleração
a
m/s2
aceleração angular
α
rad/s2
Código da Disciplina: 1EB176 – FÍSICA I
9
FAAP – Faculdade Engenharia
Grandeza fundam.
Repr.
Unid.
SI
período
T
s
freqüência
f
Hz
vazão
θ
m3/s
força, peso, empuxo
F
N
impulso
I
N.s
quantidade de movim.
q
kg.m/s
pressão, tensão mec.
p
N/m2=Pa
trabalho
W
J = joule
energia (∀)
E
J = joule
potência
P
W = watt
const. elástica
k
N/m
momento de força
M
N.m
massa específica
ρ
kg/m3
densidade linear
µ
kg/m3
densidade superficial
τ
kg/m3
peso específico
w
N/m3
módulo de Young
E
N/m3
viscosidade dinâmica
η
N.s/m2
viscosidade cinemática
ν
m2/s
tensão superficial
τ
N/m
constante universal gases
R
J/mol.K
Constante universal gravit.
G
N.m2/kg2
Equação Dimensional
M
L
T
θ
N
massa molecular
M kg/k.mol
Estabeleça por contra própria, a equação dimensional das grandezas relacionadas
abaixo, em seguida preencha o quadro:
Grandeza fundam.
Repr.
Equação Dimensional
Unid.
SI
M
L
T
θ
N
-
0
0
0
0
0
Coef. numérico log.
expoentes, f. trigonom.
Superfície (área)
A
m2
0
2
0
0
0
Volume
V
m3
0
3
0
0
0
ângulo plano
θ
rad
0
0
0
0
0
velocidade
v
m/s
0
1
-1
0
0
Código da Disciplina: 1EB176 – FÍSICA I
10
FAAP – Faculdade Engenharia
Grandeza fundam.
Repr.
Equação Dimensional
Unid.
SI
M
L
T
θ
N
velocidade angular
ω
rad/s
0
0
-1
0
0
aceleração
a
m/s2
0
1
-2
0
0
aceleração angular
α
rad/s2
0
0
-2
0
0
período
T
s
0
0
1
0
0
freqüência
f
Hz
0
0
-1
0
0
vazão
θ
3
m /s
0
3
-1
0
0
força, peso, empuxo
F
N
1
1
-2
0
0
impulso
I
N.s
1
1
-1
0
0
quantidade de movim.
q
kg.m/s
1
1
-1
0
0
pressão, tensão mec.
p
N/m2=Pa
1
1
-2
0
0
trabalho
W
J = joule
1
2
-2
0
0
energia (∀)
E
J = joule
1
2
-2
0
0
potência
P
W = watt
1
2
-3
0
0
const. elástica
k
N/m
1
0
-2
0
0
momento de força
M
N.m
massa específica
ρ
densidade linear
µ
densidade superficial
τ
peso específico
w
1
2
-2
0
0
kg/m
3
1
-3
0
0
0
kg/m
3
1
-1
0
0
0
kg/m
3
1
-2
0
0
0
N/m
3
1
-2
-2
0
0
N/m
3
1
-1
-2
0
0
1
-1
-1
0
0
módulo de Young
E
viscosidade dinâmica
η
N.s/m
viscosidade cinemática
ν
m2/s
0
2
-1
0
0
tensão superficial
τ
N/m
1
0
-2
0
0
constante universal gases
R
J/mol.K
1
2
-2
-1
-1
Constante universal gravit.
G
N.m2/kg2
-1
3
-2
0
0
massa molecular
M
kg/k.mol
1
0
0
0
-1
Código da Disciplina: 1EB176 – FÍSICA I
11
2
FAAP – Faculdade Engenharia
EXERCÍCIOS
1) Verifique a homogeneidade das seguintes equações:
a) Equação de Torricelli: v 2 = v o + 2.a.∆S
b) Equação da aceleração no MHS: a = −ω2 .A. cos(ωt + o/ )
2) Considere a seguinte equação por hipótese homogênea:
w
A = BX + y. log Z c + U sen (D.V + S)
Sendo as grandezas A, B, C e D homogêneas, respectivamente, a pressão, trabalho,
freqüência e velocidade, determine a equação dimensional das grandezas físicas X,
Y, Z, W, U, V e S.
3) Considere a equação de Weisbach que fornece a força resistente F devido ao
atrito quando um líquido real escoa com a velocidade média v através de uma
tubulação do diâmetro D e comprimento L. Determine a equação dimensional das
grandezas a e b.
4) Em certas condições, a resistência F que o ar oferece a um objeto em movimento
depende da área A da seção mestra do objeto, da velocidade v do objeto em
relação ao ar e da massa específica ρ do ar. Deduza a forma da lei que relaciona
essas grandezas entre si.
5) O peso de líquido escoado por unidade de tempo Ø, através de um vertedor
triangular depende da altura da carga h, da massa específica ρ de líquido e da
aceleração da gravidade g. Deduza a fórmula Ø = Ø (h, g, ρ).
6) Uma gota de raio R é constituída de um líquido de massa específica ρ e tensão
superficial τ. A gota quando deformada ligeiramente e abandonada, vibra com
período T. Deduza a fórmula T = T (R, ρ, τ).
7) O período de revolução de um planeta em torno do Sol é função somente da
constante de gravitação universal G, da massa M do Sol e do eixo maior a, da
trajetória elíptica do planeta. A relação entre os quadrados dos períodos de
revolução de dois planetas em torno do Sol, é igual à relação entre os eixos
maiores das elipses que eles percorrem, elevada a uma potência x, isto é:
T12
a
= ( 1 ) x Qual o valor do expoente X?
2
a2
T2
8) Supõe-se que a velocidade de propagação do som de um fluído seja função
exclusiva de sua viscosidade dinâmica η, de sua massa específica ρ e da
pressão p. Determine a expressão da velocidade v.
9) Uma mola helicoidal leve tem constante elástica k, uma extremidade é fixa e
outra suporta um sólido de massa m. Põe-se o pêndulo a oscilar verticalmente.
Deduza a lei da freqüência f das oscilações em função de m e k. A constante
adimensional que comparece nessa lei vale ½ .
Código da Disciplina: 1EB176 – FÍSICA I
12
FAAP – Faculdade Engenharia
10) A freqüência fundamental de vibração f de uma corda depende do comprimento
l, da densidade linear µ e da força tensora F. A constante adimensional que
comparece nessa relação vale ½ . Determine a freqüência fundamental numa
corda de comprimento 50 cm e de massa 10g, sujeita a uma força tensora de 288
N.
11) A velocidade de escape de um gás para a atmosfera através de um orifício no
recipiente que o contém, depende apenas da massa específica do gás e da
diferença ∆ρ entre a pressão do gás (pressão interna) e a pressão atmosférica
(externa). A velocidade de escape do ar, sob pressão de 400 kPa, através do
orifício de certo reservatório é de 480 m/s. Calcule a velocidade de escape se,
em vez de ar, o reservatório contivesse hidrogênio, sob pressão de 200 kPa.
Considere a densidade do hidrogênio em relação ao ar igual a 0,069 e que a
pressão atmosférica é de 100 kPa.
12) Um projétil atirado horizontalmente com velocidade v, descreve uma trajetória
parabólica, seja ∅ o ângulo que a velocidade do projétil forma com a direção
horizontal no instante genérico t. Verifica-se que a tangente trigonométrica de ∅
(tg ∅) depende apenas de v, t e g. Calcule ∅ no instante 3s, sabendo-se que ele
vale 30º no instante 2s e que tg∅ é diretamente proporcional a t.
13) A potência P de uma hélice de avião depende do raio R da hélice, da velocidade
angular ω da mesma e da massa específica ρ do ar. Uma hélice desenvolve
potência de 10 cv. Calcule a potência de uma segunda hélice que tem raio igual
à metade do raio da primeira hélice e gira com velocidade angular igual ao
quádruplo da velocidade angular da primeira.
14) Verifica-se experimentalmente que a velocidade de propagação de uma onda
longitudinal num meio contínuo depende da massa específica ρ e do módulo de
Young E do meio. Calcule a velocidade das ondas longitudinais no alumínio,
sabendo-se que no aço a velocidade vale 5 km/s. Dados:
(aço) = 7,8 g/cm3
E (aço) = 20.1010 N/m2
10
2
(alumínio) = 2700 kg/m3
E (alumínio) = 7.10 N/m
15) A freqüência do som fundamental emitido por uma corda vibrante é inversamente
proporcional à raiz quadrada da área A de seção transversal da corda e depende
ainda da intensidade da força tensora F do comprimento l da corda e da massa
específica ρ do material que constitui a corda. Sendo de 150 hertz a freqüência
fundamental numa corda X, calcule a freqüência fundamental numa corda Y,
constituída com material de massa específica igual à metade da massa
específica de X e que tenha comprimento igual à metade do comprimento de X,
área transversal igual à metade da área de X e força tensora igual ao quádruplo
da força tensora X.
Código da Disciplina: 1EB176 – FÍSICA I
13
FAAP – Faculdade Engenharia
16) A vazão de escape de um gás através de um orifício praticado no recipiente que
o contém, depende apenas do diâmetro do orifício, da massa específica do gás e
da diferença entre as pressões interna e externa do recipiente. A vazão de
escapamento de ar através de um orifício de diâmetro de 2 mm num certo
reservatório é de 15 litros por segundo. Calcule a vazão de escapamento através
de um orifício de 1 mm num reservatório que contém outro gás, sendo a pressão
deste, a mesma que a do ar, e as condições externas sendo as mesmas que
para o caso do reservatório conter ar. A densidade do gás em relação ao ar vale
0,09.
17) A velocidade do som num gás depende apenas da massa molecular do gás, de
sua temperatura absoluta e da constante universal dos gases. Sendo a
velocidade do som num gás à temperatura de 0ºC igual a 330 m/s, calcule a
velocidade do som em outro gás à temperatura de 27ºC, sabendo-se que a
massa molecular deste é igual ao dobro da massa molecular daquele.
TEORIA DOS MODELOS
Muitas vezes, antes de se iniciar a construção de um dispositivo oneroso
(barragem, navio, avião, etc...) é conveniente analisar o seu comportamento através
do ensaio experimental de uma réplica de tamanho reduzido, denominado modelo,
construída a custo menor.
Agindo-se desse modo, evitam-se gastos desnecessários e ainda pode-se
fazer no modelo, com maior facilidade, as modificações sugeridas pelos ensaios.
No princípio, os pesquisadores verificaram que uma vez construído o
dispositivo original, denominado protótipo, este não apresentava o comportamento
prognosticado com o ensaio de modelo. Isso ocorria porque havia a preocupação de
manter-se apenas semelhança geométrica (semelhança de forma).
Para resolver essa questão Newton propôs que entre modelo e protótipo
deveria haver uma semelhança física, isto é, deveria existir uma razão constante
(escala) entre todas as grandezas observadas no modelo e as grandezas
homólogas do protótipo.
Impondo-se a condição de semelhança física, verifica-se que os ensaios com
modelo fornecem indicações, quando não precisas, pelo menos, bastante próxima a
respeito do comportamento do protótipo correspondente.
O modelo e protótipo constituem, dois sistemas fisicamente semelhantes; a
escala de uma grandeza qualquer é definida pela razão entre a grandeza Gm
Gm
relativa ao modelo e a grandeza homóloga Gp relativa ao protótipo. λG =
Gp
Semelhança Mecânica
Para que entre modelo e protótipo exista semelhança mecânica devem ser
obedecidas as seguintes condições:
Código da Disciplina: 1EB176 – FÍSICA I
14
FAAP – Faculdade Engenharia
•
•
•
Devem ser geometricamente semelhantes, isto é, deve ser possível a
lm
definição de escala de comprimentos:
λL =
lp
As trajetórias homólogas devem ser linhas semelhantes com a mesma
escala, devendo ser os trechos homólogos percorridos em tempos tais
tm
λT =
que:
tp
Sendo determinada escala de tempos. A existência das escalas se
caracteriza a semelhança cinética.
Entre as massas de porções homólogas deve existir a relação constante:
λM =
Mm
Mp
Sendo denominada escala de massas.
Somente as escalas λL, λT, λM podem ser definidas arbitrariamente, quer
dizer, todas as escalas das grandezas mecânicas terão suas escalas escritas em
função dessas três. Essa é a lei básica da semelhança mecânica. Estendida às
grandezas térmicas, elétricas, etc..., constitui o principio básico da semelhança
física.
Estabelecimento de Escalas
Como conseqüência direta da definição de escala, uma equação dimensional
ligando grandezas físicas, deve ser idêntica à equação que relaciona as grandezas
correspondentes. Exemplos:
área
[A] = L2
λA = λ L2
2
aceleração [a] = LT
λa = λL λT2
força
[F] = [m].[a]
λF = λM λL λT-2
densidade [ρ] = ML-3
λρ = λM λL-3 ∴ λM = λρ λL3
Neste texto somente serão analisados problemas simples onde a única força
dominante é a Força da Gravidade, como no caso de modelos de navios, barragens,
ancoradouro, ressaltos hidráulicos, vertedores, etc...
Impondo-se essa condição, a partir da equação dimensional da grandeza
dominante, a aceleração da gravidade, pode-se estabelecer a relação entre a escala
dos tempos e a escala dos comprimentos:
λL
−2
[g] = LT −2
λg = λLλT
λT =
λg
A seguir o estabelecimento de algumas escalas importantes na solução de
problemas levando-se em conta que: λ g = λ L λ T
λ o/ = λ L λ T
3
-
vazão [θ] = L3T-1 =
-
velocidade [v] =LT-1 = λ v = λ L λ L
-
força [F] = MLT-2
-
potência [P] = ML2T-3 = λ P
=
−1
− 12
λ F = λ Mλ L λ T
−2
= λL λL
3
= λL
−2
e λT = λL
Código da Disciplina: 1EB176 – FÍSICA I
15
= λL
= λ ρλL λLλ T
3
2
5
2
2
− 12
= λ ρλ L λ L λ T
3
− 12
1
−3
−2
= λ ρλL
= λ ρλ L
7
2
3
FAAP – Faculdade Engenharia
EXERCÍCIOS
1. A Torre Eiffel tem 300 m de altura e massa 7000t. Deseja-se construir um modelo
de mesmo material, na escala linear de 1:10. Calcule a altura e a massa do
modelo.
2. Ensaia-se um modelo de vertedor construído na escala linear 1:10. Sendo a
velocidade num ponto do modelo 1 m/s, qual será a velocidade no ponto
correspondente do protótipo?
3. Que força seria exercida pela água contra uma parede, se um modelo de 1m de
comprimento, constituído na escala linear de 1:36, experimenta-se a ação de
uma onda de força 10N?
4. Um modelo de navio construído na escala linear 1:100, quando ensaiado em
água doce (ρ = 1g/cm3), sofre a ação de uma força resistente de 10 N na
velocidade de projeto. Calcule a correspondente força resistente das ondas do
mar (ρ = 1030 g/cm3) no protótipo.
5. Uma fábrica de locomotivas quer construir a título de propaganda, um modelo
reduzido de suas locomotivas. O projetista do modelo recebe os seguintes dados:
- comprimento da locomotiva = 16 m
- velocidade, via horizontal e sem curvas = 80 km/h
- potência da máquina = 3000 cv
- peso da máquina = 1200 kN
O modelo da máquina deverá ter 1 m de comprimento e será construído com o
mesmo material da mesma. Determine a potência, velocidade e o peso do
modelo.
6. Tem-se uma locomotiva de comprimento 20m, peso 100kN e velocidade 20m/s,
feita com material com massa específica 4000 kg/m3. Deseja-se construir um
modelo para ser ensaiado em outro lugar que tenha peso 32kN, velocidade 576
km/h e massa específica 8 g/cm3. Calcule o comprimento do modelo.
7. Tem-se um veículo de comprimento 16m e peso de 400 kN, feito com material de
massa específica 8 g/cm3. Deseja-se construir um modelo para ser ensaiado em
outro local com 1m de comprimento e peso de 10 kN, feito com material de
massa específica 800 kg/m3. Calcule a velocidade correspondente do veículo
quando a do modelo for 40 km/h.
8. Um veículo de comprimento de 3 m e peso de 20 kN funciona na Terra (g=10
m/s2) com potência de 1000cv. Qual será a potência de um segundo veículo em
outro planeta (g=5 m/s2).
Código da Disciplina: 1EB176 – FÍSICA I
16
FAAP – Faculdade Engenharia
Capítulo 2 – Estática do Movimento
Vetores
A matemática é o instrumento básico que os cientistas e engenheiros usam para
descrever o comportamento dos sistemas físicos.
As grandezas físicas que têm propriedades numéricas e propriedades de direção
são representadas por vetores.
Exemplos de grandezas vetoriais são; a força, a velocidade e a
aceleração.
As grandezas físicas que encontramos no nosso curso se
enquadram em duas categorias: ou são escalares; ou são
vetores.
“Escalar” só tem módulo e não tem direção. Por outro lado, um
“vetor” é uma grandeza física que deve ser definida não só em
módulo, mas também em direção.
O número de laranjas numa cesta é um exemplo de grandeza escalar. Se lhe
disserem que 38 laranjas se encontram na cesta a informação identifica plenamente
o objeto; não há necessidade de qualquer direção. Outros exemplos de escalares
são a temperatura o volume, a massa e os intervalos de tempo.
A força é exemplo de grandeza vetorial. Na descrição completa da força sobre um
corpo, devemos especificar a direção da força aplicada e um número dimensional
que indica o módulo da força. Ao descrevermos o movimento (velocidade) de um
corpo, devemos especificar a sua rapidez e também a direção do movimento.
Outro exemplo simples de grandezas vetorial é o deslocamento
de uma partícula, definido como a mudança de posição da
partícula.
É importante acentuar que a distância percorrida por uma
partícula é distintamente diferente do deslocamento da
partícula. A distancia percorrida (grandeza escalar) é o
comprimento da trajetória, que em geral é muito maior que o
módulo do deslocamento. Além disso o módulo do
deslocamento é a menor distancia entre os dois pontos
terminais.
O
d
fig. Quando uma partícula se move, de O até
P, sobre a curva tracejada, seu vetor
deslocamento é a seta de O para d.
Código da Disciplina: 1EB176 – FÍSICA I
17
FAAP – Faculdade Engenharia
Há muitas grandezas físicas, além do deslocamento, que são vetores. Entre elas,
estão a velocidade, a aceleração, a força, o momento, as quais serão definidas
posteriormente.
“ Estratégia para resolução de Problemas ”
Recomenda-se para efetuar a adição de dois ou mais vetores, o seguinte
procedimento:
1º. Escolher um sistema de coordenadas
2º. Fazer um diagrama dos vetores que vão ser somados (ou subtraídos)
identificando-se cada um deles.
3º. Determinar os componentes “X” e “Y” de todos os vetores.
4º. Achar os componentes resultantes e a soma algébrica dos
componentes, nas direções x e y.
5º. Usar o Teorema de Pitágoras para calcular o módulo de vetor
resultante.
6º. Usar uma função trigonométrica apropriada para achar o ângulo do
vetor resultante com o eixo dos x.
EXEMPLOS
1. Achar as componentes horizontal e vertical do deslocamento de 100m de um
super herói que voa do topo de um edifício alto, seguindo a trajetória que
aparece na figura.
RESOLUÇÃO
dx = 100 . cos 30º
y
dx
30º
x
dy = - 100 sen 30º
dx = 100 . 0,866 = 86,6m
dy
dy = - 100 . 0,5 = - 50,0m
2. Uma excursionista principia um passeio com uma caminhada de 25km para
sudeste, a partir do campo. No segundo dia, anda 40 km ao rumo 60º, ao norte
do leste. Neste ponto encontra uma torre de vigia da guarda florestal. Determinar
as componentes cartesianas dos deslocamentos da excursionista, no primeiro e
no segundo dias.
Código da Disciplina: 1EB176 – FÍSICA I
18
FAAP – Faculdade Engenharia
SOLUÇÃO
a) Se os vetores deslocamento forem A e B, no primeiro e no segundo dias,
respectivamente, e se o campo de base for a origem das coordenadas, o gráfico
dos vetores é o que se encontra na figura acima. O deslocamento A tem o
módulo de 25,0 km e aponta no rumo 45º ao sul do leste. As suas componentes
cartesianas são:
Ax = A cos 45º = 25 . 0,707 = 17,7 km
Ay = -A sen 45º = - 25 . 0,707 = 17,7 km
O valor negativo de Ay, indica que a coordenada Y diminui nesse deslocamento. Os
sinais de Ax e de Ay também são na figura. O segundo deslocamento B tem o
módulo 40,0km e está no rumo 60° ao norte do leste.
As componentes retangulares são:
Bx = B cos 60º = 40 . 0,50 = 20,0km
By = B sen 60º = 40 . 0,866 = 34,6km
b) Determinar as componentes cartesianas do deslocamento total da excursionista,
na caminhada completa.
O deslocamento resultante da caminhada R = A +B tem as componentes
dadas por.
Rx = Ax + Bx = 17,7km + 20,0km = 37,7 km
Ry = Ay + By = - 17,7 km + 34,6 km = 16,9 km
Código da Disciplina: 1EB176 – FÍSICA I
19
FAAP – Faculdade Engenharia
Objetivo: Definir “Força”
Compor “Forças Coplanares”
"Resultante de Forças Coplanares”
“Noções de Equilíbrio”
Introdução à “Estática”
“1ª e 3ª Leis de Newton”
RESUMO DA AULA
Forças
Uma utilização importante da álgebra vetorial está na sua aplicação à composição
de forças.
A definição precisa de força será analisada quando discutirmos a dinâmica do
movimento. Contudo para ganhar prática na manipulação de vetores,
consideraremos agora o problema da composição de forças e, em particular, o
equilíbrio de forças, problema este de vasta aplicação na engenharia.
Admitiremos, provisoriamente, uma noção intuitiva de força, proveniente da
experiência quotidiana como por exemplo, da força necessária para empurrar ou
puxar uma determinada carga, da força exercida por algumas ferramentas, etc...
Essa noção intuitiva sugere que uma força é uma grandeza vetorial, dotada
consequentemente, de intensidade, direção e sentido.
A experiência confirma que as forças se combinam de acordo com as regras da
álgebra vetorial.
Neste capítulo, consideraremos somente forças aplicadas a pontos materiais ( ou
partículas ) e a corpos rígidos.
Composição de Forças Coplanares
Resultante R de um sistema de forças, é a vetorial das forças componentes do
sistema:
r r r
r
r
r
R = F1 + F2 + L + Fn = R = ∑ Fi
Duas forças F1 e F2 concorrentes ( Regra do Paralelogramo)
R = F12 + F22 + 2F1F2 ⋅ cos φ
r
F1
∅
∅2
r
R
sen φ sen φ1 sen φ 2
=
=
R
F1
F2
∅1
r
F2
Código da Disciplina: 1EB176 – FÍSICA I
20
FAAP – Faculdade Engenharia
Casos particulares:
a) forças de mesma direção e mesmo sentido
r
F2
r
F1
r
R
R = F1 + F2
b) forças de mesma direção e sentido oposto
r
F1
r
F
0
2
0
c) forças perpendiculares entre si
r
F2
r
R
tgφ =
r
R
R = F2 − F1
F2
F1
R = F12 + F22
∅
r
F1
APLICAÇÕES
1. Um barco navega para o norte com uma velocidade de 12 nós. Sabendo-se que
a velocidade da maré é de 5 nós e dirigida para o oeste, calcular o módulo,
direção e sentido do vetor velocidade resultante do barco.
Norte
R = 12 2 + 5 2
tg tgθ = 5
R
θ
12
12
= 0,42
R = 144 + 25
R = 13 nós
θ = arc tg 0,42
θ = 23º para oeste a partir do norte
5
2. Decompor um vetor força, de 1000N, que forme um ângulo de 53° com a
horizontal, em suas componentes vertical e horizontal.
Fy
Fx = 1000 cos 53° = 1000 . 0,602 = 602 N
1000N
Fy = 1000 sen 53° = 1000 . 0,799 = 799 N
53º
Fx
Existindo mais que duas forças, podemos usar:
Método da Poligonal de forças (gráfico)
Código da Disciplina: 1EB176 – FÍSICA I
21
FAAP – Faculdade Engenharia
Escolhe-se um sistema cartesiano Oxy conveniente e calculam-se as componentes
cartesianas de cada força (Fix e Fiy). De acordo com as convenções usuais, as
componentes cujos sentidos concordam com o eixo são positivas; caso contrário,
são negativas. As componentes cartesianas Rx e Ry da resultante são
perpendiculares entre si; somando-se vetorialmente essas duas componentes pela
regra de paralelogramo, obtêm-se a resultante R.
Rx = ∑ Fix
y
r
Ry
Ry = ∑ Fiy
R = Rx 2 + Ry 2
r
R
Tgφ =
φ
Ry
Rx
r
x
Rx
*** Lembre-se que uma força fica definida só quando conhecemos seu módulo,
direção, sentido e o ponto de aplicação.
APLICAÇÃO
1. Achar a resultante dos vetores força coplanares, aplicados a um corpo num
ponto A, de uma estrutura metálica
y
45º
60º
A
30º
x
∑ Fx = 19 + 15 cos 60º−16 cos 45º−11cos 30º
∑ Fx = 19 + 7,5 − 11,3 − 9,5
∑ Fx = +5,7 N
∑ Fx = 15 sen 60º−16 sen 45º−11sen 30º
∑ Fx = 13 + 11,3 − 5,5 − 12,0
∑ Fx = +6,8 N
R=
6,8N
(5,7 )2 + (6,8 )2
R = 8,9 N
r
R
Tgθ =
∅
6,8
= 12
5,7
θ = arc tg 1,2
5,7N
θ = 50 º
Equilíbrio
Esta e as demais aulas a seguir, tratam das condições em que um ponto material ou
um corpo rígido, estão em equilíbrio.
O termo “Equilíbrio” significa que o corpo ou esta
em repouso ou que seu centro de massa se move
com velocidade constante. Trataremos dos corpos
em repouso ou corpos em “equilíbrio estático”
Código da Disciplina: 1EB176 – FÍSICA I
22
FAAP – Faculdade Engenharia
Esta é uma situação comum na prática da engenharia, e os princípios invocados têm
especial interesse para a engenharia civil, para os arquitetos e para os engenheiros
mecânicos, que operam com diversos projetos estruturais, como, por exemplos os
de pontes, edificações, máquinas, eixos etc. ...
Estática
Isaac Newton (1642-1727)
“A Estática é a parte da Mecânica que estuda o equilíbrio dos corpos sob a ação de
forças”.
Relativamente ao referencial adotado um corpo se diz em equilíbrio, quando se
apresenta em repouso (equilíbrio estático) ou executa translação retilínea uniforme
ou ambas combinadas (equilíbrio dinâmico).
Em problemas comuns de Engenharia e Arquitetura pode-se considerar o equilíbrio
em relação a um referencial preso à Terra (referencial de Foucault), desprezando-se
os efeitos de rotação da Terra em relação às estrelas.
Com “Estas Observações”, é intuitivo no que:
“A condição necessária e suficiente para que um corpo esteja em equilíbrio, é que a
resultante de todas as forças externas que atuam sobre o mesmo seja nula, e que, o
momento resultante de todas essas forças externas que atuam sobre o mesmo seja
nula, e que, o momento resultante de todas essas forças externas, também seja
nulo”.
“1ª e 3ª Leis de Newton”
Físico e Matemático inglês, foi
um
dos
mais
brilhantes
cientistas da história. Antes dos
30 anos de idade, formulou os
conceitos básicos e as leis da
mecânica, descobriu a lei da
gravitação universal e inventou
os métodos matemáticos do
cálculo
Antes de enunciarmos a primeira lei de Newton,
consideremos a seguinte experiência simples.
Suponhamos que um livro, esteja sobre uma mesa.
É evidente que, na ausência de perturbações
externas, o livro permanecerá sobre a mesa.
Imagine agora alguém empurrando o livro com força
suficiente que supere a do atrito, que é uma força
que, em geral, se acha presente, entre o livro e a
mesa.
O livro pode ser mantido em movimento, com
velocidade constante, se a força aplicada tiver
módulo igual ao da força de atrito e direção oposta à
força de atrito. Se a força aplicada por maior que a
do atrito, o livro será acelerado.
Se deixarem de empurrar o livro, ainda assim ele
deslizará, até cera distância, mas acabará parando
pois a força de atrito reduz seu movimento (ou
provoca aceleração negativa). Imagina agora que o
livro seja empurrado sobre uma mesa muito lisa,
bem encerrada. O livro acabará parando, mas não
rapidamente como antes. Se você puder imaginar a
possibilidade de uma mesa tão lisa que não cause
nenhum atrito, o livro, uma vez posto em movimento,
só irá parar se encontrar algum obstáculo.
Código da Disciplina: 1EB176 – FÍSICA I
23
FAAP – Faculdade Engenharia
Nos idos de 1600, mais ou menos, os filósofos pensavam que o estado natural da
matéria fosse o estado de repouso. Galileu foi o primeiro a defender um ponto de
vista diferente sobre o movimento e o estado natural da matéria. Mediante
experiências imaginadas, como a de um corpo em movimento sobre uma superfície
sem atrito, concluiu que não é da natureza de um corpo parar uma vez posto em
movimento, mas ao contrário, é de sua natureza resistir à desaceleração e à
aceleração.
Essa nova visão sobre o movimento foi formalizada posteriormente por Newton num
enunciado que ficou conhecido como o da “primeira Lei de Newton”.
“Um corpo em repouso permanecerá em repouso, e um corpo em
movimento continuará em movimento, com velocidade constante
(isto é, em movimento retilíneo e uniforme), a menos que sobre ele
atue uma força externa resultante diferente de zero”.
de maneira mais simples:
“Quando a força resultante que atua sobre um corpo é nula, a sua
aceleração é nula”.
ou seja:
“ Quando
F = 0 então
a=0”
A terceira lei de Newton afirma que quando há interação de dois corpos, a força que
o corpo 2 exerce sobre o corpo, 1 é igual e oposta à força que o corpo 1 exerce
sobre o corpo 2. Isto é
F12 = - F21
Terceira Lei de Newton
Terceira Lei de Newton. (a) A força de um
corpo 1 sobre um corpo 2 é igual e oposta à
força do corpo 2 sobre o corpo 1. (b) A força
do martelo no prego é igual e oposta à força
do prego sobre o martelo.
Código da Disciplina: 1EB176 – FÍSICA I
24
FAAP – Faculdade Engenharia
Objetivo: Enunciar, explicar e aplicar o “ Teorema de Lamy ”
Vínculos (reações vinculares)
Teorema de Lamy
“Um sólido quando em equilíbrio, sob a ação de apenas três forças externas, não
paralelas, o módulo de cada uma das forças é proporcional ao seno do ângulo
formado entre as outras duas forças”.
r
F3
sólido
α
β
γ
r
F2
F
F1
F
= 2 = 3
sen α sen β sen γ
r
F1
Vínculos, Reações Vinculares
VÍNCULO: qualquer elemento que restrinja os movimentos de um corpo.
REAÇÃO VINCULAR: é a força com a qual o vínculo atua sobre o corpo.
A introdução das reações vinculares geralmente facilitam a solução de um
determinado problema, uma vez que, introduzindo-as, não mais é necessário
preocupar-se com os vínculos, pois o efeito mecânico deles passará a ser
representado pelas reações vinculares.
a) fio ideal e flexível, inextensível e possui massa desprezível. A força exercida por
um fio ideal é sempre de tração; o fio somente pode tracionar, nunca empurrar.
O fio transmite a força aplicada em um extremo para o outro.
T1
1
T2
2
T1=T2
b) superfícies ideais – (perfeitamente lisas)
Uma superfície é lisa quando se pode desprezar em primeira aproximação, o
atrito de um corpo sobre ela.
Desse modo, uma superfície lisa, somente impede o corpo de se movimentar
na direção da perpendicularr comum às superfícies dos corpos em seu ponto de
contato. Assim a reação N de uma superfície lisa, ou de um apoio, é de
compressão e tem direção da normal comum às superfícies dos corpos.
Código da Disciplina: 1EB176 – FÍSICA I
25
FAAP – Faculdade Engenharia
r
Quando uma das superfícies de contato
é
um
ponto,
a
reação
normal
N
tem a
r
r
direção da normal à outra superfície NB .
NB
r
N
B
r
NA
A
c) superfícies reais (ásperas) - Considerar um corpo apoiado sobre
r uma superfície
áspera S; a superfície exerce
no corpo uma força de contato F , que admite uma
r
componente normal N de compressão e uma componente tangencial Fat,
denominada força de atrito de escorregamento.
Força de atrito de escorregamento é a componente tangencial da força de
contato entre os corpos; ela contraria o deslizamento ou a tendência de
deslizamento de um corpo sobre o outro.
As forças de atrito se desenvolvem porque a superfície de um sólido real
sempre apresenta asperezas, mesmo que sejam microscópicas.
O atrito se diz estático quando não há deslizamento, é dinâmico quando há
deslizamento das superfícies em contato.
APLICAÇÕES:
1. Considere os sistemas em repouso indicados nas figuras. Calcule as forças
tensoras nos fios:
T3
T2
T2
T1
45º 60º
53°
37°
T4
T3
53°
T1
37°
T4
T4
T3
100 N
100 N
(a)
T2
T1
53°
(b)
Código da Disciplina: 1EB176 – FÍSICA I
26
75º
100 N
30º
(c)
100N
FAAP – Faculdade Engenharia
SOLUÇÃO:
C)
T4
T3
30º
165º
T3 = T4 = 100 ⋅
sen165º
sen 30º
T3 = T4 = 100 ⋅
sen165º
sen 30º
165º
D)
T2
T1
T3
T4
100
=
=
sen165º sen165º sen 30º
75º
150º
135º
T3
T3
T2
T1
=
=
sen150º sen135º sen 75º
T2 = 51,8 ⋅
sen150 º
= 26.8N
sen 75º
T1 = 51,8 ⋅
sen135º
= 37,9N
sen 75º
QUESTÃO – Despreze os atritos e considere o sistema da figura. A esfera pesa 100
N, o bloco A pesa 20 N e a reação do ponto D vale 75 N. Calcule a reação no ponto
C e o peso do bloco B.
B
30º
D
A
Código da Disciplina: 1EB176 – FÍSICA I
27
FAAP – Faculdade Engenharia
COMPLEMENTAÇÃO DA AULA
REFERENCIAIS INERCIAIS - LEI DA INÉRCIA
A primeira Lei de Newton, também chamada lei da inércia, define um conjunto
especial de sistemas de coordenadas denominadas, referenciais inerciais.
“Um referencial inercial é um referencial em que é válida a primeira lei de Newton”.
Um sistema de coordenadas que tem velocidade constante em
relação às estrelas muito distantes é a melhor aproximação que
se tem um referencial inercial. A Terra não é um referencial
inercial, em virtude do movimento de translação em torno do
Sol e também do movimento de rotação em torno do seu eixo.
Quando a Terra percorre sua órbita quase circular em torno do Sol, tem uma
aceleração centrípeta, dirigida para o Sol, da ordem de 4,4 . 10-³m/s².
Alem disso uma vez que a Terra gira em torno do seu eixo, uma vez a cada 24h um
ponto do equador terrestre tem uma aceleração centrípeta adicional de
3,37 . 10-²m/s², dirigida para o centro da Terra. Essas duas aceleração são
pequenas em relação à aceleração da gravidade g (9,80m/s²) e podem-se, muitas
vezes, ser desprezadas.
Na maioria das situações, vamos admitir que a Terra seja um referencial inercial.
Assim, se um corpo estiver em movimento retilíneo e uniforme ( v =
constante ), um observador num referencial inercial (por exemplo,
um referencial que esteja em repouso em relação ao corpo) dirá que
a aceleração do corpo e a força resultante que atua sobre o corpo
são nulas.
Um observador em qualquer outro referencial inercial também dirá que a = 0 e F = 0,
para o mesmo corpo. Então a primeira lei afirma que são equivalentes um corpo em
repouso e um outro que se move com velocidade constante.
A menos que se diga outra coisa, vamos escrever, usualmente, as leis do
movimento em relação a um observador “em repouso” num referencial inercial.
Código da Disciplina: 1EB176 – FÍSICA I
28
FAAP – Faculdade Engenharia
Objetivo: Introduzir noções de “Equilíbrio”
RESUMO DA AULA
Se um corpo estiver estacionário e permanecer estacionário, diz-se que o corpo está
em equilíbrio estático.
A determinação das forças que atuam sobre um corpo em equilíbrio estático tem
muitas aplicações importantes, particularmente em Engenharia.
Por exemplo, as forças exercidas pelos cabos de uma ponte pênsil precisam ser
conhecidas a fim de que os cabos sejam projetados de modo a poder suportá-las.
Analogamente, os guindastes devem ser projetados de modo a não tombarem, ao
içarem uma carga.
As colunas que sustentam uma ponte suspensa precisam ser suficientemente fortes,
para não desmoronarem devido ao peso da ponte e ao tráfego que passa sobre ela;
o trem de pouso de uma aeronave não poderá quebrar se o piloto fizer uma
aterrissagem ruim; uma cadeira não pode ruir ou tombar quando nos sentamos nela.
Em todos os problemas desse tipo, o projetista se preocupa com o fato de que todas
estas estruturas, supostamente rígidas permaneçam rígidas sob a ação de forças e
torques associados.
Noção de Equilíbrio Estático
Sabemos que a quantidade de movimento ou movimento linear são dadas por:
r
r
p = mv
Por outro lado, força também pode ser definida como sendo o agente capaz de
modificar o vetor p em relação ao tempo, portanto se
dp
≠0
dt
⇒ tem força externa
dp
=0
dt
⇒ sem força externa
dp
=m
dt
dv
dt
v dm
=0
dt
Quando a massa (m) é constante e o vetor v também, temos que v não varia nem
de intensidade nem de direção.
Se v constante é igual à zero
Fext = 0
Código da Disciplina: 1EB176 – FÍSICA I
29
FAAP – Faculdade Engenharia
Equilíbrio Estático
Algumas Considerações sobre Momento Linear e Momento angular
Momento Linear de Uma Partícula;
Momento linear de uma partícula é um
vetor p definido como o produto da
massa m pela sua velocidade v
p =m. v
A taxa de variação do momento linear de um corpo é igual à força resultante que
atua nesse corpo e tem a mesma direção e sentido desta força.
dp
dt
Onde F representa a força resultante que atua na partícula.
O momento linear é útil quando tratamos de movimento de translação de partículas
ou sistema de partículas, incluindo corpos rígidos.
Por exemplo: há conservação do momento linear nas colisões
Ou seja:
∑F
=
Momento Angular de Uma partícula
No caso do movimento de rotação, o análogo do movimento linear é chamado de
momento angular e é definido a seguir, para o caso especial de uma partícula.
Considere uma partícula de massa m e momento linear p na posição r de um
referencial inercial. Por conveniência escolheremos os eixos x y para definirem p e
r (vide figura).
Definimos momento angular L da partícula em relação à origem 0 por L = r x p
O momento angular é um vetor.
Enfatizando as Condições de Equilíbrio (importantíssimo)
Código da Disciplina: 1EB176 – FÍSICA I
30
FAAP – Faculdade Engenharia
Um corpo rígido como uma cadeira, uma ponte ou um edifício, é dito estar em
equilíbrio mecânico se, visto de um referencial inercial, tanto o momento linear, como
o momento angular do corpo rígido, tiverem um valor constante.
A definição de equilíbrio mecânico não exige que o corpo esteja em repouso, ou seja
p e L não têm necessariamente o valor constante ou igual a zero.
Se eles forem iguais a zero, então teremos a situação de “Equilíbrio Estático”.
Neste capítulo, procuramos as restrições que devem ser impostas às forças e aos
torques que agem no corpo para ocasionar uma condição de equilíbrio.
O movimento de translação do centro de massa de um corpo rígido é dado pela
equação.
r
dp
ΣFext =
dt
r
Onde ΣFext = soma de todas as forças externas que agem sobre o corpo.
Se p tiver qualquer valor constante, inclusive zero, teremos:
dp
=0
dt
Logo a primeira condição de equilíbrio é que “a soma vetorial de todas as forças
externas que agem em um corpo deve ser nula”.
r
Ou seja: ΣFext = 0
É uma equação vetorial que num corpo rígido é dado pela expressão:
r
dL
ΣFext =
dt
r
onde ΣFext = soma de todos os torques externos que agem sobre o corpo.
Se o momento angular L tiver qualquer valor constante, inclusive zero, teremos
dL
=0
dt
logo a segunda condição de equilíbrio é: “a soma vetorial de todos os torques
externos que atuam em um corpo, deve ser nula”.
Ou seja
∑
T ext = 0
É uma equação vetorial que corresponde a três escalares.
∑
∑
tx =0
∑
ty=0
tz=0
Freqüentemente lidamos com problemas em que todas as forças estão no mesmo
plano.
Neste caso as condições de equilíbrio se reduzem a:
∑
Fx=0
Código da Disciplina: 1EB176 – FÍSICA I
31
∑
Fy=0
FAAP – Faculdade Engenharia
E se calcularmos torques em relação a um ponto que também esteja no plano xy,
todos os torques deverão ser perpendiculares ao plano xy.
Neste caso teremos
∑
Tz=0
Aplicação
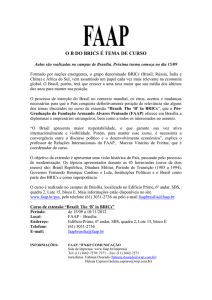
1 – Uma viga uniforme de comprimento L, cuja massa m é de 1,8 kg, repousa com
as suas extremidades sobre duas balanças digitais, conforme a figura. Um bloco
cuja massa M é de 2,7 kg repousa sobre a viga, o seu centro situado a ¼ do
comprimento da viga, em relação à extremidade esquerda. Quais as leituras das
balanças?
Código da Disciplina: 1EB176 – FÍSICA I
32
FAAP – Faculdade Engenharia
Objetivo: Resolução de Exercícios, visando Equilíbrio Estático.
Aplicações Gerais
RESUMO DA AULA
1º Despreze os atritos e considere o sistema em equilíbrio indicado na figura. A
esfera pesa 100 N e o bloco A 200 N. Calcule o peso do bloco B e a reação da
parede vertical sobre a esfera.
A
30°
45°
45°
B
Solução:
Obtém-se facilmente que:
equilíbrio de A: tração
TA = PA sem 45º
equilíbrio de B: tração
TB = PB
equilíbrio de esfera:
∑
Fx = 0
200
TA cos45º - TB cos30º - Nc = 0
2 2
1
.
+ PB − 100 = 0
2 2
2
Código da Disciplina: 1EB176 – FÍSICA I
33
FAAP – Faculdade Engenharia
Calcula-se Nc = 100N
PB = 0
EXERCÍCIO PROPOSTO
Considere os sistemas em repouso indicados na figura. Calcule as reações em cada
esfera, sabendo-se que elas são idênticas e tem peso de 48 N cada uma.
37°
D
A
B
A
C
20°
C
F
E
45°
D
EXERCÍCIOS RESOLVIDOS
Na figura representa-se uma esfera de peso 1000N, presa a um fio e apoiada em um
plano inclinado liso. Calcule a tração no fio e a reação do plano inclinado sobre a
esfera.
N
15°
T
45°
15°
45°
P
Solução
∑F x = 0
∑F y = 0
P sen45º - T cos15º = 0
N – P cos45º - T sen15º = 0
Obtém-se:
T = 732N
N = 897N
Código da Disciplina: 1EB176 – FÍSICA I
34
FAAP – Faculdade Engenharia
PROBLEMA PROPOSTO
Considere a figura. Calcule a força horizontal F aplicada ao centro de uma esfera
de peso P = 1000N e raio r = 15 cm, necessária para arrastá-la sobre o obstáculo de
altura h = 3cm.
F
Código da Disciplina: 1EB176 – FÍSICA I
35
FAAP – Faculdade Engenharia
Objetivo: Definir "Atrito Estático" - aplicações
Definir "Atrito Dinâmico" - aplicações.
RESUMO DA AULA
Atrito Estático
Só aparece quando há tendências de um corpo se deslocar sobre o outro.
r
O sentido da Fat que um corpo A exerce sobre o outro B, e' sempre oposto ao do
movimento que as demais forças agindo sobre B tentam lhe imprimir. (movimento
relativo ao corpo A).
r
Fat está compreendida entre zero e um máximo, denominado "força de destaque" e
r
Fd é observada na iminência de movimento, superada a força de destaque vem o
deslizamento.
Fat máx = Fdestaque = µ e ⋅ N
0 ≤ Fat .estático ≤ µ e ⋅ N
Atrito Dinâmico
Só aparece quando uma superfície desliza pressionada umas contra as outras.
O sentido da força de atrito dinâmico que um corpo A exerce sobre um corpo B, é
sempre oposto ao movimento de B em relação a A.
Fatdinâmico = µ d ⋅ N
O símbolo µ d . representa um número denominado coeficiente de atrito dinâmico
correspondente ao par de superfícies em contato. Tal coeficiente é sensivelmente
independente da área das superfícies em contato e da velocidade de uma em
relação a outra. Para um mesmo par de superfícies a experiência mostra que
µd .
<
µe .
Nas questões onde não se especifica se o coeficiente de atrito fornecido é o estático
ou dinâmico, deve-se considerar
µd = µe
Costuma-se escrever as duas equações que fornecem as forças de atrito sem o
índice de particularização:
Fat = µ.N
Exercício:
Calcule o peso do corpo x para manter os sistemas em equilíbrio nas
posições indicadas nas figuras.
Código da Disciplina: 1EB176 – FÍSICA I
36
FAAP – Faculdade Engenharia
1000 N
450
µ = 0,5
X
µ = 0,2
30
450
10 N
0
12 N
450
X
Exercício Resolvido
Considere a figura. Os blocos A e B têm os pesos indicados. Calcule o peso do
bloco C para manter o sistema em repouso
Corpo (A)
∑ Fy
=0
∑ Fx
TA = fat
=0
NA = PA = 1000N
0 ≤ fat ≤ µNa
portanto
0 ≤ TA ≤ 200N
Corpo (C)
Corpo (B)
∑ Fy = 0
∑ Fx = 0
Tc = Pc
Tc = TA + PB sen 30°
Pc = TA + 400 × 0,5
Pc = TA + 200
TA = 200N
TA = 0
Pc( máx ) = 200 + 200 = 400N
Pc(min) = 200N
Para o repouso do sistema 200N ≤ Pc ≤ 400N
Complementação da Aula:
As observações experimentais se resumem nas seguinte leis do atrito.
1ª) A força de atrito estática entre duas superfícies em contato é oposta à força
aplicada e pode ter valores dados por:
fs = µ s ⋅ N
Código da Disciplina: 1EB176 – FÍSICA I
37
FAAP – Faculdade Engenharia
onde a constante adimensional us é o coeficiente de atrito estático e N é a força
normal. O sinal igual da equação acima, vale quando o bloco está a pique de iniciar
o deslizamento, isto é, quando:
fs = fs máx = µ s ⋅ N
A desigualdade prevalece quando a força aplicada é menor que esse valor.
2ª) A força de atrito cinético atuando sobre o corpo tem direção oposta à do
movimento e esta representada por:
fk = µ k ⋅ .N
onde µ k é o coeficiente de atrito dinâmico
3') Os valores de µ k e de µ s dependem da natureza das superfícies, mas
µk
é, em
geral, menor que µ s . Os valores típicos de µ estão entre cerca de 0,05, em
superfícies lisas, e 1,5 em superfícies rugosas. A tabela registra alguns valores
medidos.
Tabela 5.2 Coeficientes de Atrito (Todos os valores são aproximados)
µs
µk
Aço sobre aço
0,74
0,57
Alumínio sobre aço
0,61
0,47
Cobre sobre aço
0,53
0,36
Borracha sobre concreto
1,00
0,80
Madeira sobre madeira
0,25-0,5
0,20
Vidro sobre vidro
0,94
0,40
Madeira encerada sobre neve molhada
0,14
0,10
Madeira encerada sobre neve seca
-
0,04
Metal sobre metal (lubrificados
0,15
0,06
Gelo sobre gelo
0,10
0,03
Teflon sobre teflon
0,04
0,04
Juntas sinoviais, nos homens
0,01
0,003
Todos os valores são aproximados
Código da Disciplina: 1EB176 – FÍSICA I
38
FAAP – Faculdade Engenharia
Objetivo: Definir "Articulações" - Conexões de Pino
RESUMO DA AULA
O corpo indicado na figura, articulado mediante um pino cilíndrico, pode girar
livremente ao redor do eixo e do pino; entretanto, o ponto 0 ligado ao pino não pode
deslocar-se em nenhuma direção perpendicular ao eixo do pino. Por isso, a reação
r
F de um pino cilíndrico pode ter qualquer direção perpendicular ao seu eixo.
r
r
Desconhecem-se, portanto, a intensidade F e a direção F . Usualmente opera-se
r
r
com as componentes cartesianas Fx e Fy :
F
Fy
o/
Fx
Fx = F cos o/
Fy = F sen o/
F = Fx 2 + Fy 2
tg o/ =
Fy
Fx
Os sinais de Fx e Fy :obtidos mediante cálculos, através das equações de equilíbrio,
r
r
confirmam ou não os sentidos adotados para Fx e Fy :.
APLICAÇÕES
Exercícios:
1. Nos sistemas em repouso indicados nas figuras, o peso do corpo Suspenso vale
1k N e o peso da barra articulada é desprezível. Calcule as reações nos pontos A e
B.
(b)
(a)
Fio
B
C
B
45°
•
C
C
Fio
60°
30°
A
(c)
Fio
A
•
30°
B
Código da Disciplina: 1EB176 – FÍSICA I
39
•
A
45°
FAAP – Faculdade Engenharia
Exercício Resolvido
(a)
Fio
y
B
RA
30°
30°
T
A
•
1000 N
1000 N
x
∑ Fx = RA cos 30° - T = 0
∑ Fy = RA sen 30° - 1000 = 0
1000
1000
=
= 2000
sen 30°
0,5
RA = 2000 N
RA =
T = RA cos 30° = 2000 ⋅
3
2
T = 1730 N
2. Considere a figura; o peso da barra é desprezível. Conhecendo-se a força
tensora em um dos fios, calcule a força tensora no outro fio e a compressão da barra
C
45°
B
100 N
D
30°
A
•
400 N
Solução:
A barra está sujeita à ação de 4 forças, pois seu peso é desprezado. As 3 forças
concorrem no ponto D; logo a 4ª força, a reação da articulação F também deve
r
r
concorrer em D . Deduz-se que a força F tem a direção da barra.
Código da Disciplina: 1EB176 – FÍSICA I
40
FAAP – Faculdade Engenharia
∑ Fx = 0
∑ Fy = 0
resolvendo
F sen 30° = 100 + T cos 45°
F cos 30° + T sen 45° = 400
F = 366N
T = 117N
F = 250,6N
(b)
T = 74,5N
Código da Disciplina: 1EB176 – FÍSICA I
41
FAAP – Faculdade Engenharia
Objetivo: Introduzir noções sobre o "Equilíbrio do Corpo Rígido".
RESUMO DA AULA
Corpo Rígido
Corpo Rígido ou sólido perfeito é aquele que não se deforma quando submetido a
ação de forças; admite-se que a distancia entre seus pontos seja invariável.
***, Na realidade todos os corpos são deformáveis, podendo se plásticos
(deformação persiste após ,cessada a força) e elásticos (volta a sua configuração
natural, após cessada a força). Os corpos deformáveis senão estudados na
Resistência dos Materiais.
Momento Polar de Força
Um corpo sujeito á ação de uma força, além de sofrer transformação pode girar em
tomo de um ponto. Essa rotação é medida por meio do momento dessa força em
relação ao polo. (momento escalar)
r
Momento escalar : M 0 ( F ) = ±braço = ±F .b
"É o produto da força (F) pelo braço b, precedido pelo sinal + ou - o qual depende do
sentido de rotação da força".
sinal + momento no sentido anti-horário
Sinal - momento no sentido horário
***braço = é sempre a menor distância que vai da linha ação da força, até o polo.
***quando a linha de ação da força passa pelo polo, o braço é nulo, portanto o
momento é nulo.
***unidade de M (momento) é no SI o Newton . metro (N.m).
É usual:
Condições Gerais de Equilíbrio para o Corpo Rígido
DEFINIÇÃO DE EQUILÍBRIO
Um corpo está em equilíbrio em relação a translação quando está em repouso ou
quando se acha animado de movimento retilíneo e uniforme.
Igualmente o equilíbrio relativo à rotação correspondente ao de um corpo desprovido
de rotação ou animado, de uma rotação uniforme em torno de um eixo.
Código da Disciplina: 1EB176 – FÍSICA I
42
FAAP – Faculdade Engenharia
Um corpo sobre o qual age um sistema de força esta em equilíbrio, quando tal
sistema de forças aplicadas simultaneamente não produz mudança alguma em seu
movimento de translação (retilínea) nem no de rotação.
Condições de Equilíbrio Sob a Ação de Forças Coplanares Paralelas.
1.a. "A soma das forças aplicadas a um corpo numa direção qualquer deve ser nula".
Isto quer dizer que a soma das forças para cima é igual à das forças para baixo e o
mesmo para as forças agindo em outras direções, tais como para a esquerda, para a
direita etc...
Quando é preenchida esta condição, nenhuma força está desequilibrada e, portanto
este não possuirá aceleração linear, ou seja, o sistema de forças não produzirá
modificação alguma no movimento linear ou de translação do corpo.
1.b. A soma algébrica do momento de todas as forças aplicadas a um corpo com
relação a um eixo perpendicular ao plano que as contém deve ser zero.
Isto quer dizer que a soma dos momentos relativo a um eixo qualquer no sentido dos
ponteiros do relógio é igual A soma dos momentos em sentido contrário, relativo ao
mesmo eixo.
Verificando-se esta condição nenhum momento ou conjugado aplicado ao corpo
estará desequilibrado e portanto este não possuirá aceleração angular. Em outras
palavras o sistema de momentos não produzira' modificação alguma no movimento
angular ou de rotação do corpo. Se inicialmente ele se encontrava em repouso
continuará neste estado indefinidamente e se inicialmente possuía um movimento de
rotação, continuará com ele na mesma velocidade angular (movimento de rotação
uniforme).
Observação: Centro de Gravidade de um corpo: é o ponto no qual se pode
considerar concentrado todo o seu peso; isto é, a direção ou linha de ação do peso
passa pelo centro de gravidade.
Uma força vertical, com sentido para cima, cujo módulo seja igual ao peso do corpo,
aplicada ao seu centro de gravidade, manterá o corpo em equilíbrio.
APLICAÇÃO
1. Achar o comprimento dos braços de uma balança de 36cm de largura sabendo
que permanece em equilíbrio. Quando de suas extremidades pendem dois pesos
10 N e 20 N , respectivamente. Supõem-se que a balança não tem peso e está
em equilíbrio.
Código da Disciplina: 1EB176 – FÍSICA I
43
FAAP – Faculdade Engenharia
0,36 m
0,36 - x
10 N
X
A
20 N
M A = −20.x + 10( 0,36 − x) = 0
M A = −20.x + 3,6 − 10 x = 0
−20.x − 10 x = −3,6
− 30 x = −3,6
x = 0,12m
Obs.:
Note que este exercício enuncia que o sistema está em equilíbrio, daí
impormos a condição de equilíbrio de rotação universal ∑ M A = 0
Problemas Propostos
1. Uma viga uniforme, horizontal, de comprimento 8 m e peso 200 N, está fixa a
uma parede vertical por uma articulação que permite a sua rotação num plano
vertical. Na outra extremidade, a viga esta suportada por um cabo que faz um
ângulo de 53° com a horizontal. Se uma pessoa de 60 0 N estiver a 2 m da
parede, calcular a tensão no cabo e a força exercida pela viga sobre a parede.
(a) viga uniforme suportada por um cabo.
(b) Diagrama de forças desta viga.
T = 313N
θ = 71,1º
R = 518N
2. Uma escada uniforme, de comprimento l e peso W=50N está encostada numa
parede vertical, lisa. O coeficiente de atrito estático, entre o pé da escada e o
solo, é µ = 0,40 . Achar o ângulo mínimo, θ mínimo, tal que a escada não
escorregue.
Resp.:
Código da Disciplina: 1EB176 – FÍSICA I
44
FAAP – Faculdade Engenharia
(a) Escada uniforme, em repouso, apoiada em uma parede lisa. O solo oferece
atrito.
(b) Diagrama de forças da escada. Observe que as forças R, W e P passam pelo
ponto comum 0'.
Código da Disciplina: 1EB176 – FÍSICA I
45
FAAP – Faculdade Engenharia
Objetivo: Resolver problemas que envolvem o conceito de "Momento" (Torque).
RESUMO DA AULA
1. Considere a viga abaixo submetida as forças indicadas, calcule a resultante bem
como seu ponto de aplicação;
a) Resultante
↑+
↓−
R = −30 − 5 − −20 = −100N
o sinal "-" que dizer que a resultante é para baixo
o sinal "-" que dizer que a resultante é para baixo
b) Ponto de aplicação
O M0 da resultante R será igual ao M0 de todas as outras forças aplicadas á viga.
−R .x = −30.0,40 − 50.1,0 − 2,0.1,5
− 100 x = −12 − 50 − 30
92
100
x = 0,92m
x=
então a resultante R está aplicada a 0,92m de 0
2. Dobra-se um perfil uniforme de ferro de 40cm de comprimento em ângulo reto,
obtendo-se um perfil L de 15 x 25cm. Se se suspende a vara assim dobrada
como se indica na figura, achar o ângulo que formará com a vertical o lado que
mede 25cm quando o sistema se achar em equilíbrio.
Código da Disciplina: 1EB176 – FÍSICA I
46
FAAP – Faculdade Engenharia
MP=0
Seja
ω
− 25ωx 2 + 15ωx1 = 0
(I)
o peso por cm de perfil, dai 15 ω e 25 ω
x 2 = 12,5 sen φ
substituindo em I
x 1 = 7,5 sen φ
− 25ω.12,5 sen φ = −15ω.7,5 cos φ
x2
12,5
x
cos φ = 1
7,5
sen φ =
− 312,5 sen φ = −112,5 cos φ
sen φ
112,5
=
cos φ 312,5
tgφ = 0,36
φ = 19,80°
φ ≅ 20°
portanto
Problemas propostos:
1. O conjunto indicado na figura é estático. A viga homogênea pesa 400 N. Tem-se
AC =0,9m e BC = 0,7m. Calcule as reações sobre a viga em; A e C.
B
D
FIO
C
•
100 N
53º
A
Código da Disciplina: 1EB176 – FÍSICA I
47
FAAP – Faculdade Engenharia
2. 0 sistema indicado na figura é estático. A barra homogênea vertical tem peso 20
N e a esfera homogênea 75 N. Tem-se AC =100cm; AB =60cm e AE =40cm.
Despreze os atritos e calcule as reações em A, C, D e E.
B
F
Fio
C
•
•
80
N
E
53º
D
Exercício proposto:
Deseja-se fazer um cilindro, de peso W e R, subir um degrau de altura h, como
mostra a figura. Uma corda está enrolada no cilindro e é puxada na horizontal.
Admitindo que o cilindro não escorregue no degrau achar a força mínima necessária
F para fazer o cilindro vencer o degrau e calcular a força de reação em P.
(a) Cilindro, de peso W, puxando por uma força F contra um degrau.
(b) O diagrama de forças do cilindro, quando estiver a pique de subir o degrau.
(c) A soma vetorial das três forças externas é nula.
Código da Disciplina: 1EB176 – FÍSICA I
48
FAAP – Faculdade Engenharia
Capítulo 3 – As Leis do Movimento
Objetivo:
• Conceituar Força
• Primeira Lei de Newton
• Massa Inercial
• Segunda Lei de Newton (A Partícula sob a Ação de uma Força Resultante)
• Terceira Lei de Newton
Resumo da Aula:
A Dinâmica é a parte da Mecânica que relaciona os movimentos dos corpos com
as causas que os produzem.
Neste capítulo resolveremos os seguintes problemas:
• Quais as condições que devem existir para que uma partícula tenha um
dado movimento;
• Que movimento uma partícula realiza sobre certas condições.
A palavra partícula é usada como sinônimo de ponto material, ou seja, como
um corpo cujas dimensões são desprezíveis em relação ao comprimento de sua
trajetória.
Pela experiência sabemos que o movimento de um corpo é o resultado de
sua interação com os outros corpos que o cercam. As interações são
convenientemente descritas por um ente chamado força.
A Dinâmica tem por base um conjunto de princípios que são muitas vezes
designados pelo nome de Leis de Newton do Movimento. Lembre-se que os
princípios da Dinâmica são enunciados em relação a sistemas de referenciais
desprovidos de aceleração (sistemas inerciais)
São eles:
Princípio da Inércia (1ª Lei de Newton)
Se um corpo estiver em repouso v = o , tende a ficar em repouso (equilíbrio
estático).
Se um corpo estiver em movimento retilíneo e uniforme v = cte tende a ficar
realizando esse movimento (equilíbrio dinâmico), ou seja: “Uma partícula não pode
modificar, por si só, o seu estado de movimento”.
(
)
(
ou seja:
sob a ausência
)
v = o - repouso (equilíbrio estático)
v = cte - movimento retilíneo e uniforme (equilíbrio
dinâmico)
Obs.: Este princípio é aproveitado no lançamento de naves espaciais.
As mesmas são lançadas de tal maneira que uma vez livres da resistência do
ar da atração da Terra, tenham velocidade dirigida para o astro que devem atingir.
A nave espacial manterá essa velocidade durante dias, meses, anos até
entrar no campo gravitacional do astro ou até que o centro do controle provoque o
disparo de foguetes da astro-nave para modificar sua velocidade.
de forças
Código da Disciplina: 1EB176 – FÍSICA I
49
FAAP – Faculdade Engenharia
Princípio da Proporcionalidade ou Principio Fundamental da Dinâmica (2ª Lei
de Newton)
Uma partícula sujeita à ação de uma força adquire uma aceleração com as
seguintes características:
• Módulo: proporcional ao módulo da força
• Direção: a direção da força
• Sentido: o sentido da força
Imagine uma experiência onde uma partícula é submetida sucessivamente a
diferentes forças, esquematizando:
F1
a1
F2
a2
F3
a3
Fn
an
verifica-se que:
F1
a1
=
F2
a2
=
F3
= LL =
a3
Fn
= constante
an
Esta constante recebe no nome de massa inercial da partícula ou
simplesmente massa da partícula, sendo representada por um m.
Quanto maior a massa de uma partícula, maior a sua inércia. Assim sendo é
mais fácil empurrar uma caixa de fósforo, do que um caminhão. Da mesma forma, é
mais fácil parar uma bola em movimento do que um carro também em movimento.
F1
a1
=
F2
=
a2
F3
= LL =
a3
Fn
an
= m então
F
= m ou seja F = ma
a
portanto, levando em conta a natureza vetorial teremos a Equação Fundamental da
Dinâmica
F = ma
Princípio da Ação e Reação (3ª Lei de Newton)
“A toda ação corresponde uma reação de mesmo módulo, mesma direção e
sentido oposto”.
Código da Disciplina: 1EB176 – FÍSICA I
50
FAAP – Faculdade Engenharia
Note que a ação e reação jamais atuam sobre a mesma partícula, pois isto
violaria o princípio da proporcionalidade entre força e aceleração.
Referencial Inercial
São aqueles em relação aos quais vale o princípio da inércia. São referenciais
inerciais:
a) Referencial de Copérnico ou referencial inercial primário: é formado por
três eixos rígidos com origem no centro de gravidade do sistema solar
(praticamente centro do Sol) e dirigido para as “estrelas fixas”.
b) Referencial de Galileu ou referencial inercial secundário: é todo referencial
que se translada retilínea e uniformemente em relação a referência de
Copérnico.
c) Referencial de Focault: é todo referencial rigidamente ligado à Terra. Tal
referencial não é inercial, mas comporta-se como tal, quando a duração do
movimento é pequena em comparação com o dia, e a extensão da
trajetória é pequena quando comparada ao raio da Terra.
Salvo expressa declaração contrária fica subentendido que o referencial
adotado seja inercial, ou que possa ser considerado como tal.
Movimento Retilíneo. Segunda a Lei de Newton do Movimento.
Se a força resultante exercida na partícula for não nula, a aceleração é não
nula. No caso particular de a força resultante e a velocidade terem direções iguais, a
aceleração e a velocidade têm direções iguais e o movimento é retilíneo; a Dinâmica
Retilínea pode ser tratada escalarmente.
Se escolhermos o eixo Ox coincidindo com a trajetória da partícula de massa
m, a aceleração na direção Oy será nula e os componentes serão escalares.
Código da Disciplina: 1EB176 – FÍSICA I
51
FAAP – Faculdade Engenharia
Dinâmica
Objetivo: Aplicação da 2a Lei de Newton
Resumo da Aula: Resolução de Exercícios
1. Um corpo de massa m=5 kg encontra-se em repouso, sobre um plano horizontal
liso. Em determinado momento, é aplicada ao corpo uma força horizontal F de
intensidade 10 N. Determine, 2 segundos após a aplicação da força:
a) a aceleração do corpo
b) a velocidade do corpo
c) a distância percorrida pelo corpo
Solução
Da 2ª Lei de Newton podemos concluir que sendo cte a força aplicada ao
corpo a aceleração também será, portanto o corpo adquire um movimento
uniformemente acelerado.
a) F = ma
10 = 5 a
a = 2 m/s2
b) no MUV a velocidade é:
v = vo + at
vo = 0, pois o corpo se achava em repouso
v = a.t
v = 2.4 = 4 m/s
c) para MUV a equação horária é:
S = So + vot + ½ at 2
So = 0, isto é o início da contagem dos tempos, coincide com a dos
espaços vo = 0
S = ½ at 2
S = ½ .2.4 = 4 m
2. Um corpo de massa m = 50 kg acha-se sobre um plano horizontal liso e possui
uma velocidade v = 10 ms. Em determinado instante aplica-se a este corpo uma
força horizontal F, oposta ao movimento do corpo e com intensidade de 100 N.
Determinar:
a) a distância percorrida pelo corpo ao fim de 2s, contados a partir do
instante em que se aplicou a força.
b) Quanto tempo após o instante em que a força foi aplicada, o corpo para.
Solução
A força F , que se opõe ao movimento, faz com que o corpo adquira um
movimento uniformemente retardado, cuja aceleração é:
F = ma
100 = 50 a
a = 2 m/s2
a) S = vot + ½ at 2
S = 10.2 + ½ .(-2).2 2
S = 20 – 4 = 16 m
Código da Disciplina: 1EB176 – FÍSICA I
52
FAAP – Faculdade Engenharia
b) v = vo + at
vo = 0
0 = 10+(-2).t
2t = 10
t = 5s
3. Determinar a aceleração com que se movimenta um corpo, num plano inclinado
liso.
Olhe para a figura. Suponha que um corpo de peso
P , seja abandonado no plano inclinado. Faça a
experiência, usando uma superfície inclinada bem
lisa (por exemplo, uma régua de plástico) e uma
PP
moeda.
Pn
A experiência mostra que o corpo desliza, plano
α
a
abaixo. A força a que o corpo está sujeito é o seu
α
peso P .
A figura mostra que o vetor P é a diagonal de um paralelogramo, podendo assim ser
considerado como a soma de dois vetores representados pelos lados do
paralelogramo. (Isto foi visto no capítulo em que apresentamos a introdução aos
vetores). Em outras palavras, o peso do corpo é um vetor P , que pode ser
decomposto em duas componentes que chamaremos de PP e Pn , respectivamente.
Assim sendo:
a) No triângulo retângulo menor, temos: sen α =
cateto oposto
hipotenusa
PP
PP = P senα mas P = mg
P
∴ PP = m g sen α
No caso de um plano inclinado liso, PP é a única
componente que influi no movimento do corpo
plano abaixo.
b) Ainda no triângulo retângulo menor, podemos definir:
cateto adjacente
cos α =
hipotenusa
P
cos α = N
∴
PN = P cosα
P
Durante o movimento, o corpo não abandona o plano. Isto significa que a ação do
corpo sobre o plano ( que é a componente PN do peso do corpo) é neutralizado pela
∴
senα =
reação N do plano.
Em módulo, PN = N. Sendo a componente PN neutralizada pela reação N , o corpo
fica sujeito apenas à ação da componente PP , responsável pelo movimento do
corpo plano abaixo.
Código da Disciplina: 1EB176 – FÍSICA I
53
FAAP – Faculdade Engenharia
Agora podemos calcular a aceleração com que o
corpo desliza no plano inclinado. Se uma força de
intensidade P age sobre um corpo de massa m
temos, pela equação fundamental: PP = ma.
mas PP = mg. sen α, portanto mg sen α = ma
∴ a = g sen α
Note que a aceleração é independente da massa do corpo.
Considere agora o caso em que o corpo é lançado plano acima, com velocidade
inicial vo.
Neste caso, a componente PP se opõe ao
vo
movimento do corpo.
Este realizará então um movimento uniformemente
retardado com aceleração
a = -g sen α
α
4. Considere o conjunto apresentado na figura abaixo: dois corpos, A e B, unidos
por uma corda de massa desprezível, sendo que se aplica uma força F ao corpo
A. Qual será a aceleração adquirida pelo conjunto, em virtude da aplicação da
força F?
a
B
A
T
T
F
Solução
Siga a receita. Aplique a equação fundamental da Dinâmica em cada corpo:
Corpo A -: F – T = mA . a
Corpo B -:
T = mB . a
Somando membro a membro:
F = (m A + m B ).a ∴ a =
F
(m A + m B )
Código da Disciplina: 1EB176 – FÍSICA I
54
FAAP – Faculdade Engenharia
As Leis do Movimento (Dinâmica)
Objetivo: Resolução de Exercícios
Resumo da Aula
1. Considere o conjunto apresentado na figura abaixo: os corpos A, B e C, unidos
entre si por cordas de massa desprezível, da maneira ilustrada pela figura. O
conjunto se move com aceleração a, devido à força F aplicada ao corpo A.
Pergunta-se: as tensões nas duas cordas são iguais ou desiguais, em módulo?
a
Solução
C
B
T1
A
T1
T
F
T
Aplicando a equação fundamental da Dinâmica: para o corpo (B)
T – T1 = mB . a sendo a ≠ 0
T – T1 ≠ 0, portanto T≠ T1
As forças tensoras que agem em B são necessariamente distintas, em módulo,
sendo maior a que tem sentido concordante com o do movimento.
2. Considere a máquina de Atwood montada no topo de um plano inclinado,
conforme se vê na figura. Determine a aceleração do sistema que se movimenta
no sentido indicado na figura.
a
T
m1
T
P1
m2
α
P2
Solução
Verifique as forças que agem sobre o corpo de massa m1, quando desce o plano
inclinado liso. Escrevendo para este corpo a Equação Fundamental da Dinâmica:
P1 sen α - T1 = m1.a
(I)
Para o corpo subir verticalmente, você escreverá:
T – P2 = m2.a
(II)
somando (I) e (II)
P sen α − P2 m1g sen α − m 2
P1 sen α - P2 = (m1 + m2) a
a= 1
=
m1 + m 2
m1 + m 2
m sen α − m 2
Resposta: O conjunto se move com a = 1
⋅g
m1 + m 2
Código da Disciplina: 1EB176 – FÍSICA I
55
FAAP – Faculdade Engenharia
3. Um passageiro de massa m está no interior de um elevador que desce
verticalmente, com aceleração a. Determine a intensidade da força que o piso do
elevador exerce no passageiro.
Solução O passageiro tem a aceleração do
elevador. A resultante das forças que agem
no passageiro é: R = P – N
a
Aplicando
P
ao
passageiro
a
equação
fundamental da Dinâmica, obtemos: R = ma
P – N = ma
N = -m + P
N = mg - ma
N = m (g – a)
N
Portanto, a intensidade da força que o piso do elevador exerce no passageiro é:
N = m (g-a)
4. Um corpo de peso P encontra-se suspenso a um dinamômetro preso ao teto de
um elevador. Determinar a indicação do dinamômetro quando:
a) o elevador sobe com movimento uniformemente acelerado, de aceleração
a;
b) o elevador sobe com movimento uniformemente retardado,
aceleração tem módulo a.
T
a)
cuja
a
P
A indicação do dinamômetro é a ação do corpo
sobre o dinamômetro, cujo módulo é igual a T.
Quando o elevador sobe com aceleração (a).
T - P = ma
T = ma + mg
T = ma + P ∴
T = m (a+g) maior que o peso do corpo
b) Quando o elevador sobe com movimento retardado, isto é, com aceleração
(-a).
T - P = -ma
T = P-ma
∴
T = mg-ma
T = m (g-a) menor que o peso do corpo
Código da Disciplina: 1EB176 – FÍSICA I
56
FAAP – Faculdade Engenharia
5. Um projétil de massa m é atirado num bloco de madeira, com uma velocidade
inicial v e penetra no bloco até uma profundidade d. Calcule a força de
resistência (suposta constante) que a madeira opõe à penetração.
d
v 2 = v o2 + 2ad
por Torricelli
0 = v o2 + 2ad
madeira
v o2
a=−
2d
o sinal (-) quer dizer que o corpo realiza na madeira um movimento retardado
v2
∴ F = m a ∴ F = −m o
2d
onde o sinal (-), indica que a força se opõe ao movimento do projétil.
Objetivo: Exercícios Propostos
Resumo da Aula
1. Certo balão (aeróstato) está sujeito a uma força ascensional F, tendo massa M,
ele desce com aceleração constante a. Atirando fora lastro com massa m, o
balão sobe com igual aceleração. A força ascensional se conserva e a resistência
do ar tem a mesma intensidade em ambos os casos. Determine a massa de
lastro descarregado.
2(Mg − F)
Resp. m =
( g + a)
2. Considere uma pessoa com massa m em pé no interior de um elevador. O
elevador sofre aceleração descensional a (partida para baixo ou parada na
subida).
a) Determine a força com que o piso do elevador sustenta a pessoa.
Resp. N = m(g-a)
b) Em que condições reina imponderabilidade no interior do elevador?
Resp. a=g; o elevador cai livremente; a pessoa flutua
3. Pretende-se construir o telhado de uma garagem. Supondo o atrito desprezível,
determine o ângulo de inclinação do telhado, para que a água da chuva escoe
sobre ele no mínimo tempo.
Resp. α = 45º
4. No esquema anexo nota-se um caminhão que arrasta uma esfera mediante em
fio. Considere L = 5,0 m; h = 4,0 m e g = 10m/s2. Qual é a aceleração do
caminhão quando a esfera se destaca da pavimentação?
Resp. a = 7,5 m/s2
Código da Disciplina: 1EB176 – FÍSICA I
57
FAAP – Faculdade Engenharia
Solução
l
h
y
N
α
α
h = 4,0 m
x
Fat
Enquanto a esfera estiver sendo
arrastada sobre a pavimentação com
o fio tenso, sua aceleração é igual à
do caminhão e b = 3,0 m. No instante
de destaque do piso impomos: N = 0;
Fat = 0.
P
b = 3,0 m
5. O sistema esquematizado compõe-se de um elevador vertical de Massa M e um
operador de massa m, estando apoiado na plataforma daquele. O operador puxa
a corda e sobe com aceleração constante a, juntamente com o elevador.
Determine a força que a plataforma exerce no operador?
(g + a)
Resp. F = (m − M)
2
Código da Disciplina: 1EB176 – FÍSICA I
58
FAAP – Faculdade Engenharia
Objetivo: Conceituar Força de Atrito
Resumo da Aula
Força de Atrito: quando um corpo está apoiado numa superfície, e aplicamos
uma força para deslocar o corpo, aparece uma força que se opõe ao movimento; é a
força de atrito.
A força de atrito é causada pelas irregularidades das superfícies em contato,
que fazem com que as saliências de uma das superfícies esbarrem nas saliências
da outra. Quando as superfícies são perfeitamente polidas, aparecem forças de
aderência que se opõem ao movimento.
O módulo da força de atrito é igual ao módulo da força aplicada; aumentandose a força aplicada, a força de atrito aumenta, até um determinado, valor máximo,
chamada força máxima de atrito.
Uma vez atingido este valor o movimento é iminente, e qualquer aumento da
força aplicada produzirá o escorregamento do corpo ao longo da superfície.
O atrito que tende a impedir que um corpo em repouso deslize sobre uma
superfície chama-se força de atrito estático. A força que se opõe ao movimento,
quando o corpo já está deslizando chama-se força de atrito dinâmico.
O atrito de escorregamento obedece as seguintes leis:
1ª lei: a força de atrito (estático ou dinâmico) depende da natureza das superfícies
em contato.
2ª lei: a força de atrito (estático ou dinâmico) é praticamente independente da
extensão da área de contato entre os dois corpos.
3ª lei: o valor máximo da intensidade da força de atrito estático é diretamente
proporcional à reação normal às superfícies em contato (o fator de proporcionalidade
chama-se coeficiente de atrito estático).
4ª lei: a intensidade da força de atrito dinâmico é diretamente proporcional a reação
normal às superfícies em contato (o fator de proporcionalidade chama-se coeficiente
de atrito dinâmico).
A seguir apresentamos uma tabela de valores do coeficiente de atrito
determinados experimentalmente.
Superfícies em contato
aço sobre aço (duro)
aço sobre aço (doce)
chumbo sobre aço (doce)
cobre sobre aço (doce)
níquel sobre níquel
aço fundido sobre aço fundido
teflon sobre teflon
ue
0,78
0,74
0,95
0,53
1,10
1,10
0,04
ud
0,42
0,57
0,95
0,36
0,53
0,15
0,04
Examinando a tabela de coeficientes de atrito, verificamos que o coeficiente
pode tomar valores menores, iguais ou maiores que 1. Verificamos também que o
coeficiente de atrito dinâmico é inferior ou igual ao coeficiente de atrito estático.
A experiência mostra que o atrito de escorregamento diminui quando se
lubrificam as superfícies; mostra ainda, que as forças de atrito independem, dentro
de amplos limites, o aumento da velocidade com que uma superfície escorrega
sobre a outra.
Código da Disciplina: 1EB176 – FÍSICA I
59
FAAP – Faculdade Engenharia
Objetivo: Resolução de Exercícios
Resumo da Aula
1. O sistema da figura é abandonado em repouso na data zero. Calcule a
velocidade do sistema constituído pelos blocos de pesos Pa = 100 N e
Pb =
15 N na data t = 4,6 s. O coeficiente de atrito entre todas as superfícies em
contato é µ = 0,50 e g = 10 m/s2.
a
b
37º
53º
Resp: va = vb = 1,4 m/s.
2. O corpo A com massa m = 3,00 kg movia-se com velocidade = 3,00 m/s para
baixo ao longo do plano inclinado, quando a força horizontal F constante foi
aplicada no corpo. Calcule F sabendo-se que o corpo pára após percorrer a
distância d = 1,00 m para baixo. O coeficiente de atrito entre o corpo e o plano é
µ = 0,200 e g = 9,81 m/s2.
F
A
θ = 30º
Resp.: F = 23,9 N
3. Dois blocos com pesos P1 = 40 N e P2 = 60 N em contato entre si são
abandonados em repouso e deslizam sobre um plano inclinado, como mostra a
figura. Os coeficientes de atrito entre os blocos e o plano valem µ1 = 0,60 e µ2 =
0,10.
Dado: g = 10 m/s2, calcule:
a) a aceleração adquirida pelos blocos
b) a velocidade dos blocos até percorrerem, a partir do repouso, a distância
d = 7,2 m
c) a intensidade da força exercida pelo bloco (1) sobre o bloco (2)
2
1
Resp.:
a) 3,6 m/s
b) F = 9,6 N
c) v = 7,2 m/s
Código da Disciplina: 1EB176 – FÍSICA I
60
θ = 37º
FAAP – Faculdade Engenharia
Solução
N2
µ2N2
N1
F
a
a
2
1
µ1N1
F
θ
x
θ
θ
θ
x
P1
P2
x: P2 sen θ - F - µ2N2 = m2 . a
y: N2 - P2 cosθ = 0
de (I) 31,2 + F = 6,0a (A)
2:
(I)
(II)
de (II) N1 = 48N
1:
x: P2 sen θ - F - µ1N1 = m1 . a
(III)
y: N1 - P1 cosθ = 0
(IV)
de (III) 4,8 + F = 4,0a (A)
de (IV) N1 = 32N
resolvendo (A) e (B)
a = 3,6m/s2
F = 9,6N
4. O esquema indica dois corpos com pesos Pa = 100 N e Pb = 55 N. O corpo A
repousa sobre um plano horizontal e o corpo B. Apoiado sobre A, está preso por
um fio a uma parede. O coeficiente de atrito entre todas as superfícies em
contato é u = 0,10. Ao corpo A é aplicado a força horizontal F = 100 N. Dado g =
10 m/s2, calcule a aceleração adquirida por A.
45º
B
A
Resp.: a = 8m/s2
Código da Disciplina: 1EB176 – FÍSICA I
61
F
FAAP – Faculdade Engenharia
PB
horizontal:
uN’ - T cos θ = 0
T
θ
B
uN’
N’
vertical: N’ + T sen θ - PB = 0
resolvendo: T = 5,0
= 7,1 N
N = 50 N
N’
uN’
horizontal:
F = uN – uN’ = m a
F
A
uN
vertical: N – N'-PA = 0
PA
N
aA
resolvendo: N = 150 N
Código da Disciplina: 1EB176 – FÍSICA I
62
a = 8,0 m/s2
FAAP – Faculdade Engenharia
Objetivo: Exercícios Propostos e Resolvidos
Resumo da Aula
1. A figura mostra o corpo B simplesmente apoiado no corpo A; entre eles o
coeficiente de atrito é µ. Calcule a maior aceleração do corpo A sobre o plano
inclinado do ângulo θ, para que o corpo B não deslize sobre ele.
Analise as seguintes situações:
a) A desce em movimento acelerado.
B
b) A sobe em movimento acelerado.
A
θ
µg
a) a =
µ sen θ + cos θ
µg
b) a =
cos θ − µ sen θ
Resp.:
2. Considere a figura e despreze os atritos.
Dados: F = 100 N, PA = PB = 250 N e g = 10 m/s2.
Calcular a aceleração dos corpos e a tração do fio.
F
A
B
Solução
F
a
A
B
b
xA
xB
aB
aA
F
2T
Código da Disciplina: 1EB176 – FÍSICA I
63
3T
FAAP – Faculdade Engenharia
comprimento do fio (1):
( XB − b ) + ( XA + XB − a − b ) + ( XA + XB − b ) = L1
portanto
3 XB + 2 XA = cte
Derivando uma vez em função do tempo vem:
d
d
XB + 2 XA = 0
dt
dt
Derivando mais uma vez em função do tempo:
3VB + 2VA = 0
3
3
d
d
VB + 2 VA = 0
dt
dt
3aB + 2aA = 0
donde em módulo:
3aB = 2aA
2
aB = aA (I)
3
comprimento do fio (1):
( XB − b ) + ( XA + XB − a − b ) + ( XA + XB − b ) = L1
portanto
3 XB + 2 XA = cte
Derivando uma vez em função do tempo vem:
d
d
3 XB + 2 XA = 0
3VB + 2VA = 0
dt
dt
Derivando mais uma vez em função do tempo:
d
d
3 VB + 2 VA = 0
3aB + 2aA = 0
dt
dt
donde em módulo:
3aB = 2aA
2
aB = aA (I)
3
e ainda
F − 2T = mA ⋅ aA
Para corpo (A)
(II)
3T = mB ⋅ aB
Para corpo (B)
Resolvendo as equações I, II e III, teremos:
aA = 2,77 m
aB = 1,85 m
s2
s2
T = 15,4N
Código da Disciplina: 1EB176 – FÍSICA I
64
(III)
FAAP – Faculdade Engenharia
3. Um homem puxa um carro, sendo ele mesmo passageiro, em um plano inclinado
com ângulo θ = 20,0º, como mostra a figura. A massa do conjunto homem e carro
é m = 100 kg e o coeficiente de atrito entre o carro e o plano é u = 0,250. Calcule
a aceleração do carro com o homem tracionando o cabo com força T = 250 N.
Dado g = 9,81 m/s2.
Resp.:a = 1,84 m/s2
4. O sistema esquematizado é abandonado em repouso na data zero. O coeficiente
de atrito entre o corpo B e o plano inclinado é µ = 0,50 e g = 10 m/s2. Calcule a
velocidade de B na data t = 2,1s, em cada das hipóteses.
a) PA = 20,0 N PB = 100 N
b) PA = 400 N PB = 100 N
•
B
θ = 370
Resp.:
a)
aA = 0,476 m/s2
aB = 0,952 m/s2
vB = 2,00 m/s
b)
aA = 2,5 m/s2
aB = 5,0 m/s2
•
A
vB = 10,5 m/s
Solução (item b)
A desce e B sobe a rampa, a força de
atrito é dinâmica com intensidade
Fat = µ ⋅ N . Inextensibilidade do fio (1)
XB + 2 XA = cte .
Derivando uma fez em função de tempo
d
d
XB + 2 XA = 0
dt
dt
VB + 2VA = 0
Código da Disciplina: 1EB176 – FÍSICA I
65
FAAP – Faculdade Engenharia
Derivando mais uma vez em função do tempo
d
d
VB + 2 VA = 0
dt
dt
aB + 2aA = 0 (I)
em módulo
aB = 2aA
x : T − µN − mBg sen θ = mB ⋅ aB (II)
(B)
g : N − mBg cos θ = 0
(A):
(III)
m A ⋅ g − 2T = m A ⋅ a A
(IV)
de (II) T − 40 − 60 = 10(2a A )
de (III) N = 80N
Resolvendo-se
aA = 2,5 m/s2
aB = 5,0 m/s2
vA = 10,5 m/s2
5. O sistema indicado é abandonado em repouso. O coeficiente de atrito entre o
corpo B e o apoio é µ = 0,50 e g = 10 m/s2. Calcule a velocidade de B após A ter
percorrido a distância d = 0,30 m, em cada uma das hipóteses.
a) PA = 200 N PB = 100 N
b) PA = 50,0 N PB = 1000 N
B
Resp.:
a) vB = 1,00 m/s
b) vB = 0,500 m/s
θ = 370
Código da Disciplina: 1EB176 – FÍSICA I
66
A
FAAP – Faculdade Engenharia
Objetivo: Conceituar Trabalho, Potência e Energia
Resumo da Aula
Trabalho
Consideremos uma partícula movendo-se em trajetória C qualquer, e seja F
uma das forças exercidas nela. No intervalo de tempo dt a partícula efetua
deslocamento dr tangente à trajetória em P e percorre sobre a trajetória o arco de
extensão ds, sendo dr = ds.µt e dr = ds .
Seja θ o ângulo entre F e dr no instante t. O trabalho dw realizado pela força
F no deslocamento dr é definido pelo produto escolar.
dw(F) = F .dr = F.ds. cos θ
y
t
ds
P
dr
P’
θ
C
F
dr = ds.µt
0
x
A unidade de trabalho no SI é o joule (símbolo J). Quando a força age a favor
do movimento, ela é força motora, e realiza trabalho positivo chamado trabalho
motor; o ângulo θ é nulo ou agudo. Quando a força age contra o movimento, ela é
força resistente; e realiza trabalho negativo chamado trabalho resistente; o ângulo θ
é obtuso ou 180º. Quando a força é normal ao deslocamento, o trabalho é nulo.
Assim, o trabalho de uma força qualquer coincide com o trabalho de sua
componente tangencial.
s
sf
ds
•
•
Pi
t
Ft
dr
si
θ
Pf
F
Ao descrever um arco de trajetória PiPf , da posição inicial Pi até a posição
final Pf, a partícula fica sujeita a forças que podem ser constantes ou variáveis; seja
sf
sf
si
si
F uma destas forças; o seu trabalho é: w(F) = ∫ F.ds. cos θ = ∫ Ft.ds .
Código da Disciplina: 1EB176 – FÍSICA I
67
FAAP – Faculdade Engenharia
Daí, sendo F uma das forças exercidas na partícula que descreve a trajetória
C, denomina-se trabalho de F, entre as posições Pi e Pf, a integral de linha de F ao
longo da Curva C, entre as posições Pi e Pf
Ft
L
W(F)
s
si
sf
Em diagrama cartesiano Ft versus s, o trabalho da força F é representado
pela área da superfície L, representativa de Ft e o eixo das posições s, no
deslocamento que interessa.
W(F) = área.
Exemplo: 1) Mediante um guindaste eleva-se lentamente (sem aceleração) um
tambor contendo areia com peso global P = 800N à altitude H = 20m. Durante a
ascensão perde-se 0 = 100N de areia que escoa uniformemente através de um
orifício existente no fundo do tambor. Calcule o trabalho realizado pelo guindaste.
Solução
Como o tambor é elevado lentamente, a força de tração T no cabo exercida pelo
guindaste, equilibra em cada instante, o peso do tambor, isto é, T = P. Em cada
metro de ascensão, perdem-se 5,0N de areia através do orifício. À altitude x o peso
global é P = 800 – 5,0x. O trabalho do guindaste é:
xf
20
xi
0
W ( T ) = ∫ Tdx = ∫ ( 800 − 5,0 x )dx
Portanto: W(T) = 15 k . J
Exemplo: 2) Um bloco como massa m = 50kg é puxado sobre uma superfície
horizontal por uma força F que forma ângulo 0 acima da horizontal. Durante o
movimento, a intensidade da força varia com a posição x de acordo com a equação
F = 6,0x (SI) e o ângulo 0 de acordo com a fórmula cos 0 = 0,70–0,020x. Calcule o
trabalho realizado pela força F no deslocamento do corpo.
a) de x1 = 0
até x2 = 10m
b) de x1 = 10m até x2 = 20m
Código da Disciplina: 1EB176 – FÍSICA I
68
F
θ
FAAP – Faculdade Engenharia
Solução
a)
W (F )) = ∫
X2
X1
x2
F .dx. cosθ = ∫ (6,0 x ).(0,70 − 0,020 x ).dx
x1
10
W (F ) = ∫ ( 4,2 x − 0,12 x 2 )dx =
[
0
]
= 2,1x − 0,040 x 3 .10
0 = 170J
2
b)
20
W (F ) = ∫ ( 4,2.x − 0,12.x 2 )dx =
[
10
]
20
= 2,1x − 0,040 x 3 .10
= 350J
2
Potência
Em aplicação prática, especialmente em relação à engenharia das máquinas,
é importante conhecer a rapidez com que o trabalho é realizado.
A potência de uma força é o trabalho que ela realiza por unidade de tempo. Se uma
força F realiza trabalho dw (F) em duração dt, a potência da força é:
dw(F) F.dr
=
dt
dt
dw(F)
P=
= F.v = Ft.v
dt
A unidade de potência no SI é o watt (símbolo W).
P=
Uma força F pode agir com potência constante ou variável; em qualquer caso
o trabalho que ela realiza entre os instantes ti e tf é:
tf
W(F) = ∫ P.dt
dw(F) = P.dt
ti
P
L
W(F)
t
ti
tf
Em diagrama cartesiano P versus t, o trabalho da força F é representado pela
área da superfície compreendida entre a linha L representativa da potência P e o
eixo dos tempos, no intervalo de tempo que interessa.
W(F) = área.
Código da Disciplina: 1EB176 – FÍSICA I
69
FAAP – Faculdade Engenharia
Objetivo:
Conceituar Energia
Teorema da Energia Cinética
Teorema da Conservação da Energia Mecânica
Resumo da Aula
Energia
Dizemos que um sistema possui energia quando ele é capaz de realizar
trabalho; medimos a energia do sistema pelo trabalho realizado pelas forças que o
sistema pode exercer. A energia de um sistema depende de seu estado: pode ser
energia potencial e/ou energia cinética.
A energia potencial de um sistema é a energia que ele possui em virtude de
sua configuração, isto é, das posições relativa de suas partes. Por exemplo, dizer
que uma mola esticada possui energia potencial igual a 5,0 J equivale dizer que a
mola ao contrair-se até sua configuração natural realizará trabalho igual a 5,0 J.
A energia cinética de um sistema é a energia que ele possui em virtude do
movimento de suas partes. Por exemplo, dizer que um projétil possui energia
cinética igual a 6,0 kJ equivale dizer que o projétil, ao ser detido por um obstáculo,
realizará trabalho sobre o obstáculo igual a 6,0 kJ.
A soma das energias cinética e potencial de um sistema chama-se energia
mecânica.
Teorema da Energia Cinética: o trabalho realizado entre dois pontos pela
resultante das forças exercidas sobre uma partícula é igual à variação de energia
cinética entre estes dois pontos.
Energia Potencial
Quando ao modo de trabalhar, distinguem-se dois tipos de forças, as forças
conservativas e as forças não conservativas.
A
B
Pi
C
Pf
Consideremos dois pontos fixos Pi e Pf e uma força F. O ponto de aplicação
da força pode ser levado de Pi a Pf por inúmeras trajetórias, tais como Pi A Pf, Pi B
Pf, Pi C Pf, etc...Se o trabalho de F for o mesmo em todos os percursos de Pi a Pf,
exprime-se esta propriedade dizendo que a força é conservativa. Sendo F uma força
conservativa aplicada em uma partícula, chama-se energia potencial da partícula
numa posição genérica P o negativo do trabalho realizado pela força F, quando a
partícula se desloca da posição de referência Po até a posição P.
Código da Disciplina: 1EB176 – FÍSICA I
70
FAAP – Faculdade Engenharia
Teorema da Energia Mecânica
Chama-se energia mecânica de uma partícula a soma de suas energias
potencial e cinética.
(EM) = (EP) + (EC)
O teorema da energia cinética afirma que a variação da energia cinética é
igual ao trabalho de todas as forças. Das forças exercidas na partícula,
genericamente, umas são conservativas e outras não.
W(F) = W(Fcons) + W(Fñ.cons)
W(F cons) + W(Fñ.cons) = (EC)f – (EC)i
O trabalho das forças conservativas, é igual ao decréscimo de uma energia
potencial.
Portanto:
W(F cons) = -∆(EP)
W(Fñ.cons)+(EP)i-(EP)f = (EC)f – (EC)i
W(Fñ.cons) = [(EC)f + (EP)f] – [(EC)I + (EP)f]
W (Fñ.cons) = (EM)f – (EM)i = ∆(EM)
Daí, o teorema da energia mecânica: o trabalho das forças não conservativas
é igual à variação da energia mecânica.
Suponha, como caso particular, que sejam conservativas todas as forças exercidas
na partícula.
Neste caso, W (Fñ.cons) = 0 e (EM)f = (EM)i ∴ ∆(EM)=0
Daí, o teorema da conservação da energia mecânica: é constante a energia
mecânica de uma partícula sobre a qual só atuam forças conservativas.
Exercícios – Propostos e Resolvidos
1. Um projétil com massa m = 10 g atinge um barranco horizontalmente com
velocidade v = 200 m/s e penetra nele até a profundidade h = 0,10 m. Supondo
que o solo resista à penetração do projétil com força constante, calcule a
intensidade desta força.
Resp.: F = 2,0 x 103N
Solução
Pelo T.E.C.
X ( R ) = ∆ Ec
1
m.v 2
2
F = 2,0.10 3 N
F .h =
2. Um operário dá n = 60 marteladas por minuto com um martelo de massa m=0,50
kg, movendo-se em trajetória aproximadamente horizontal é imprimindo-lhe, para
cada martelada, a velocidade v = 3,0 m/s. Calcule o trabalho que o operário
efetua sobre o martelo durante o tempo t = 1,0h.
Resp.: 8,1 x 103J
3. Um bloco com massa m = 50 kg é puxado sobre uma superfície horizontal por
uma força F que forma ângulo θ acima do horizontal. Durante o movimento, a
intensidade da força varia com a posição x de acordo com a equação F = 6,0 x
(SI) e o ângulo θ de acordo com a fórmula cos θ = 0,70 – 0,020 x. Calcule o
trabalho realizado pela força F no deslocamento do corpo.
Código da Disciplina: 1EB176 – FÍSICA I
71
FAAP – Faculdade Engenharia
θ
a) de x1 = 0 até x2 = 10m
b) de x1 = 10 m até x2 = 20m
Resp.: a) 170 J b) 350 J
4. Um projétil com massa m = 2,00 g sai da boca de uma arma com velocidade v =
300 ms. A intensidade da força resultante que acelera o projétil no interior do cano
é F = 400 – (8000/9) x (SI), sendo x a posição do projétil em relação à posição
inicial. Calcule:
a) o comprimento do cano
b) a potência que desenvolve a arma no instante em que o projétil se encontra
no ponto médio do ano
Resp.: a) vm = 260 m/s
b) 53,0 kW
Solução
a) pelo T.E.C.
8000
2,00.10 −3
2
∫0 (400 − 9 x).dx = 2 .(300)
l
portanto:
l = 0,450m
b) seja vm a velocidade da bala no ponto médio do cano
pelo T.E.C.
0,225
8000
2,00.10 −3
(
400
−
x
).
dx
=
.vm 2
∫0
9
2
portanto
x = 0,255m
Fm = 200N
vm = 260m/s
Pm = Fm.vm
Pm = 52,0kW
Código da Disciplina: 1EB176 – FÍSICA I
72
FAAP – Faculdade Engenharia
Objetivo:
Exercícios Complementares
1. Mediante um guindaste eleva-se lentamente (sem aceleração) um tambor
contendo areia com peso global Po = 800 N à altitude H = 20 m. Durante a
ascensão perde-se Po = 100 N de areia que escoa uniformemente através de um
orifício existente no fundo do tambor. Calcule o trabalho realizado pelo guindaste.
Resp.: W (T) = 15 kJ
2. Uma partícula com massa inicial m = 4,0 kg, inicialmente parada na origem, é
submetida à força resultante F = Fi, onde F segue o gráfico abaixo. Calcule:
c) o trabalho realizado pela força quando a partícula se desloca de x = 0 até
x = 3,0m e de x = 3,0 m até x 6,0 m.
d) a energia cinética da partícula em x = 3,0 m e em x = 3,0 m e em x = 6,0m.
e) a potência da força F nas posições x = 3,0 m e x = 6,0 m.
3
2
1
1
2
3
4
5
6
7
-1
-2
-3
Solução
a) W = área = 1,5 + 6,0 = 7,5J
0–3 0–3
W = área = 1,5 – 1,5 – 3,0 = -3,0J
3–6 3–6
b) (EC) = W = 7,5J
3
0–3
(EC) = W = W +
6
0–6
0–3
W = 7,5 – 3,0
= 4,5J
3–6
c) v (3) = 1,94m/s P(3) = F(3) v(3) = 3,0 . 1,94 = 5,8W
v (6) = 1,5 m/s P(6) = F(6) v(6) = (-3,0) . 1,5 = -4,5W
Código da Disciplina: 1EB176 – FÍSICA I
73
FAAP – Faculdade Engenharia
3. Uma partícula com massa m = 4,0 kg, inicialmente parada na origem, é submetida
na data t =0 à força resultante F = Fi , a potência da força está dada no gráfico.
Calcule:
a) o trabalho recebido pelo corpo de t = 0 até t = 15s.
b) a potência constante que forneceria o mesmo trabalho total anterior .
c) o instante onde a velocidade é v = 10 m/s.
d) a intensidade da força em t = 1,0s, t = 2,0s e t = 8,2s.
e) a velocidade da partícula em t = 11s.
P(w)
40
Solução
2,0
11
15 t(s)
a) W = área = 40 + 360 + 80 = 480J
0– 15 0 – 15
W (0 − 15 ) 480
b) P (média) =
=
= 32,0W
∆t
15
c) seja t a data onde v = 10m/s
4,0
W(0-t) =
(10) 2 = 200J
2
Contabilizando o trabalho mediante o cálculo de áreas no gráfico cartesiano,
verificamos que 2,0s < 1 < 11s
Portanto
0= 40 + 40 (t – 2,0)
t = 6,0s
d) F (1,0) = 4 5 = 8,95N
F (2,0) = 4,0 5 = 8,95N
10
F (8,2) =
= 3,33N
3
e) W (0 – 11) = 40 + 360 = 400J
m
W (0 – 11) = .v 2
2
4,0 2
400 =
.v .(11)
2
v(11) = 10. 2
v(11) = 14,1m/s
Código da Disciplina: 1EB176 – FÍSICA I
74
FAAP – Faculdade Engenharia
Objetivo:
Exercícios Complementares
Teorema da Conservação da Energia Mecânica
1. Um corpo com massa m = 40g é mantido em repouso encostado em uma mola
leve, comprimindo-a de x = 20 cm. Solto o corpo, ele recebe um impulso da mola e
percorre o trecho ABCE, passando por C com velocidade Vc = 20 m/s dados: AD
= 40 m, BD = 30 m, BC = 20 m e g = 10 m/s2. Calcule a constante elástica da
mola nas seguintes hipóteses:
f) não existe atrito
g) o coeficiente de atrito entre o corpo e todas as superfícies em contato com
ele é µ = 0,50.
B
C
E
A
•
D
Solução
a)
EM)A=(EM)C
k
. XA 2 = mg&&.&BD + m.VC 2
2
N
portanto: k = 1,0.103
m
b)
A até B
E.(diss ) = Fat .AB = u.N.AB = u.m.g. cosθ AB = 8,0 joules
B até C
E.(diss ) = Fat .BC = u.N.BC = n.m.g.BC = 4,0 joules
( E M ) A = ( E M ) C = E diss + E diss
k
XA 2 = m.g.BD + E.diss + E.diss
2
N
k = 1,6.10 3
m
2. No ponto A abandona-se um sólido com massa M=2,00 kg. O sólido desliza pelo
plano inclinado, passa sem choque para o plano horizontal, e caminha em direção
a uma mola (k = 32,0 N/m). A mola é leve e tem constante elástica k = 18
Dados: AB = 20 cm; BC = 10 cm; µ = 0,50; θ = 53º e g = 10 m/s 2 .
A
Calcule:
C
θ
B
Código da Disciplina: 1EB176 – FÍSICA I
75
kN
.
m
FAAP – Faculdade Engenharia
Solução
x=0
xD
A
xM
hA
θ
E.( diss .AB ) = Fat .AB = u.N.AB
B
C
D
M
= u.m .g. cos θ AB = 1,2 joules
E.( diss .BC ) = Fat .BC = u.N.BC
= u.m .g.BC = 10 joules
E.( diss .CD ) = Fat .CD = u.N.CD
= u.m .g.xd = 0,050 joules
E.( diss .CM ) = Fat .CM = u.m .g.xm = 10 xm
a)
( E .M ). A = ( E .M )c + E .diss . AC
m
m .g . AB . sen o .θ =
Vc 2 + E .diss . AB + E .diss .BC
2
(10 ).( 0 ,20 ).( 0 ,80 ) 2 = 1,0Vc 2 + 1,2 + 1,0
por tan to :
Vc = 10 m / s
b)
( E .M ). c = ( E .M ). b + E .diss .CD
m
k
m
Vc 2 = . Xd 2 +
.Vd 2 + E .diss .CD
2
2
2
1,0 .( 1,0 ) 2 = 9000 .( 0 ,0050 ) 2 + 10 .Vd 2 + 0 ,050
VD = 0 ,85 m / s
c)
Xm = 1,0.10 2 m
3. Um sólido com massa m = 20 kg atirado no ponto A com velocidade VA=10 m/s,
percorre a superfície ABC, em direção a uma mola que se encontra na sua
configuração natural e que tem constante elástica k = 856 N/m.
Dados: AB = 6,0m, BC = 5,0m, θ = 53 º , µ = 0,20 e g = 10m/s 2 . Calcule a máxima
compressão sofrida pela mola.
A
VA
B
C
θ
Código da Disciplina: 1EB176 – FÍSICA I
76
FAAP – Faculdade Engenharia
Cinemática do Movimento Retilíneo
Objetivo:
Relembrar os conceitos de tempo, posição, velocidade,
aceleração, introduzindo o capítulo Cinemática da Partícula
Resumo da Aula
a) velocidade média: Vm =
x 2 − x 1 ∆x
=
t 2 − t1
∆t
∆x r dx
=v−
∆t →0 ∆ t
dt
b) velocidade instantânea: Vi = lim
c) aceleração média: a m =
v 2 − v 1 ∆v
=
t 2 − t1
∆t
∆a r dv
=a−
∆ t → 0 ∆t
dt
d) aceleração instantânea: a i = lim
dv
d dx d2 x
= =
dt dt dt
dt
A aceleração é a derivada 1' da velocidade e derivada 2' do espaço, ambas em
relação ao tempo.
Outra expressão útil é obtida, multiplicando-se numerador e denominador por dx
ou seja,
dv dx
a=
dt dx
dv dx
a=
dx dt
dx
=v
mas
dt
dv
a =v
dt
portanto
dv d 2 x
dv
a=
=
=v
2
dt
dt
dt
a
Aplicação
Deduzir as equações para o seguinte movimento / M R U / v=cte / a=0
Código da Disciplina: 1EB176 – FÍSICA I
77
FAAP – Faculdade Engenharia
dx
dt
vdt = dx
v=
∫ vdt = ∫ dx
v ∫ dt = ∫ dx
vt + B = x + A
vt + B − A = x
vt + C = x
Condições especiais:
t =0
x =C
X0 = 0
x = x0
posição inicial
X = x 0 + vt
Problemas propostos
1. Deduzir as equações para o movimento retilíneo uniforme variado.
2. Um automóvel com massa m = 1200 kg percorre uma pista reta e horizontal com
velocidade invariável v0 = 40,0 m/s = 144 km/h. As rodas motrizes desenvolvem
potencial global P = 60,0 kW = 81,5 cv (P = F.v).
a) Determine a resultante R das forças exercidas no veículo por atrito e por
resistência do ar.
b) Admitir que R seja proporcional ao quadrado da velocidade. Desligado o motor,
após quanto tempo a velocidade cai para v = 20,0 m/s = 72,0 km/h.
3. Usando o "Interactive Physics", executar as seguintes simulações:
Arquivo: cinem1.ip
Nome: Simulação de cinemática escalar I
Conceitos explorados:
Posição, deslocamento, espaço percorrido, velocidade, aceleração, movimento
acelerado e movimento retardado.
Resumo:
Esta simulação permite visualizar o movimento de uma partícula, inicialmente com
velocidade constante, e assim, explicar o conceito de posição. Após um certo tempo,
uma aceleração passa a agir no corpo, em sentido contrário ao da velocidade, e o
corpo é inicialmente freada e então acelerado (quando a velocidade inverte o seu
sentido). No instante t=2s, a aceleração deixa de agir e o corpo continua com
velocidade constante. Os gráficos de posição, velocidade e aceleração são visíveis.
Código da Disciplina: 1EB176 – FÍSICA I
78
FAAP – Faculdade Engenharia
Arquivo: cinem2.ip
Nome: Simulação de cinemática escalar II
Conceitos explorados:
Velocidade média e velocidade instantânea.
Resumo:
Através desta simulação, é possível acompanhar o movimento de dois corpos que
partem da mesma posição (x=0). Um deles se move com uma velocidade constante
(vermelho) de 2 m/s, e outro (verde) possui uma velocidade que se altera com o
tempo, acelerando em alguns trechos, e desacelerando em outros. No instante
t=3,76s, os corpos ocupam novamente a mesma posição (x=7,52m), embora o
comportamento da velocidade tenha sido bastante distinto. Assim, é possível discutir
o conceito de velocidade média para o corpo verde no intervalo 0 - 3,76 s,
comparando com o movimento executado pelo corpo vermelho no mesmo intervalo.
Código da Disciplina: 1EB176 – FÍSICA I
79
FAAP – Faculdade Engenharia
Código da Disciplina: 1EB176 – FÍSICA I
80
FAAP – Faculdade Engenharia
Objetivo:
Exercícios Complementares
Resumo da Aula
1. Um corpo com massa m = 5,0 kg efetua movimento retilíneo em um plano
horizontal sob ação da força de direção invariável e intensidade variável com o
tempo F = 25 t (S.I.) . Sabe-se que na data 1,0s o corpo está na posição 7,5 m
animado com velocidade 6,5 m/s. Dado g = 10 m/s2. Calcule a posição,
velocidade e aceleração no instante t = 4,0 s.
53º
F
2. Um corpo com massa m = 2kg efetua movimento retilíneo em um plano
horizontal sob ação da força de direção invariável e intensidade variável com o
tempo F = 30
t (S.I.) . O coeficiente de atrito entre o corpo e o plano é
µ = 0 ,50 . Sabe se que na data 1,0s o corpo está na posição 25,5 m animado
com velocidade 20 m/s. Nessas condições a posição do corpo na data t = 4,0s,
considerando g = 10 m/s2, assume qual valor?
37º
F
3. O corpo A com massa m = 10 kg efetua movimento reto sobre um plano inclinado
sob ação da força de direção constante e intensidade variável com o tempo
F = 6,0t + 150 (SI). Na data 1,0 s o corpo está em posição 15 m animado de
velocidade 10 m/s. Dado: g = 10 m/s2 e µ = 0,50 (coeficiente de atrito entre o
corpo e o apoio) calcule a posição do corpo na data t = 2,0 s.
Solução – Exercício 1
X : F cosθ = m a
(I)
y : N – F senθ - m g = 0 (II)
de (I) 15t = 5,0 a
a = 3,0 t
Código da Disciplina: 1EB176 – FÍSICA I
81
FAAP – Faculdade Engenharia
dv
= 3,0t
dt
dv = 3,0tdt
mas
a=
dv
dt
∫
dv = 3,0 ∫ t.dt
t2
+A
2
v = 1,5t 2 + A
v = 3,0
6,5 = 1,5.1,0 2 + A
6,5 − 1,5 = A
A = 5,0
t = 1,0s
então v = 1,5t2 + 5,0
mas v =
dx
= 1,5t 2 + 5,0
dt
dx = 1,5t 2 .dt + 5,0dt
dx
dt
∫
dx = 1,5.∫ t 2 .dt . + 5,0.dt
x = 1,5
x = 0,5 t3 + 5,0 t + B
p/
t3
+ 5,0.t + B
3
x= 7,5 m
t = 1s
7,5 = 05 . 13 + 5,0 . 1 + B
7,5 – 0,5 – 5,0 + B
7,5 – 5,5 = B
B = 2,0
X = 0,5 t3 + 5,0 t + 2,0
P/
t = 4s
a = 3,0 . 4
a = 12,0m/s2
v = 1,5 t2 + 5,0
v = 1,5 . 42 + 5,0
v = 29 m/s
x = 0,5 t2 + 5,0 t + 20
x = 05 , 43 + 5,0 . 4 + 20
x = 54m
Código da Disciplina: 1EB176 – FÍSICA I
82
(III)
FAAP – Faculdade Engenharia
Solução – Exercício 2
x : f COS θ - U n = m . a (I)
y : N – F seno θ - mg = 0 (II)
de (II) N= F seno θ + mg
F(cos θ − u.senoθ − u.mg
em (I) a =
m
15. t − 5,0
2
15 t
∫ dv = ∫ 2 − 5,0 dt
3 2
v = 5t / − 5,0t + 20
a=
portanto:
∫ dx = ∫ (5,0t
3
)
/ 2 − 5,0t + 2,0 dt
x = 2,0t 5 / 2 − 2,5t 2 + 20 t + 6,0
para
t = 4s
x = 110m
Solução
x : F - mg senoθ - u N = m.a
y : N - mg cosθ = 0
(I)
(II)
de (II) N = mg cosθ
em
(I)
F − mg.( senoθ + u. cos θ)
m
a = 0,60.t + 5,0(SI)
a=
∫ dv = ∫ (060.t + 5,0)dt
v = 0,30.t 2 + 5,0.t +,4,7
∫ dx = ∫ (0,30.t
2
)
+ 5,0.t + 4,7 dt
x = 0,15.t 3 + 2,5.t 2 + 4,7.t + 4,7
para t = 4,0s
x = 27,9m
Código da Disciplina: 1EB176 – FÍSICA I
83
FAAP – Faculdade Engenharia
Objetivo:
Analisar o Movimento Curvo Plano de uma Partícula
Resumo da Aula
Movimento Curvo Plano
2.1 Movimento curvo: posição
Dependendo da trajetória do movimento ser conhecida ou não de antemão,
temos duas maneiras para estabelecer a posição da partícula, pela posição escalar
ou pela posição vetorial
Posição Escalar
Consideremos o movimento curvo de
uma partícula sobre uma trajetória C.
Ω
P(t)
Para definirmos a posição P(t) da
partícula, escolhemos arbitrariamente
C
sobre a trajetória uma posição fixa de
referência representada pela letra
s
grega Ω (ômega), denominada origem
das posições e um sentido positivo
Fig. 2.1
ao longo da trajetória, indicada por uma seta. A posição P(t) da partícula sobre sua
trajetória é dada pela coordenada de posição ou abscissa curvilínea representada
pela letra s, que define a extensão do arco ΩP ao longo da trajetória; este
comprimento será precedido do sinal (+) ou (-) conforme esteja na parte positiva ou
na parte negativa da trajetória. É claro que, quando a partícula passa pela origem Ω,
sua coordenada de posição é nula neste instante. Portanto,
s = ± (extensão do arco ΩP
2.1
Sendo o ponto material móvel, sua coordenada de posição é função do tempo, s = s
(t). O ponto material estará em repouso se s for permanentemente o mesmo.
Resumindo, para definirmos a posição do ponto material mediante este processo
necessitamos conhecer:
a) a trajetória do ponto material;
b) a origem das posições Ω e o sentido positivo da trajetória, ou seja, o
sentido dos s crescentes
c) a lei horária do movimento sobre a trajetória na forma s = s(t)
Código da Disciplina: 1EB176 – FÍSICA I
84
FAAP – Faculdade Engenharia
Posição vetorial
Consideremos o movimento curvo de
uma
partícula
relativamente
ao
y
sobre
trajetória
desconhecida
P(t)
y
r
do referencial Oxy. A posição p(t) da
neste
caso
é
s
C.
Sejam i j os versores fundamentais
partícula
s
Ω
referencial cartesiano retangular Oxy,
definida
C
Fig. 2.2
j
vetorialmente, bastando utilizar o
x
l
x
vetor r traçado da seção ou raio vetor. Durante o movimento da partícula, sua
posição P(t) varia no decurso do tempo e o ver r tem módulo e direção variando.
Assim, r é o vetor dependente do tempo, isto é:
r = r ( t ) = P( t ) − 0
2.2
Se r for um vetor constante no decurso do tempo, então a partícula está em
repouso relativamente a Oxy.
A Eq. 2.2 representa a lei horária do movimento na forma vetorial, porque permite,
em cada instante, construir o vetor r e determinar a posição da partícula. O lugar
geométrico da extremidade do vetor r determina a trajetória da partícula.
A expressão cartesiana do vetor posição é:
r = xi + y j
(2.3)
r = x2 + y2
(2.4)
e seu módulo é
2.2 Movimento curvo: deslocamento
Quando num intervalo de tempo ∆t = t’ – t (t’ > t), a partícula muda sua posição P(t)
para P’(t’), dizemos que ela efetuou um deslocamento naquele intervalo de tempo,
relativamente ao referencial adotado. O deslocamento da partícula representa a
variação de sua posição, isto é, a diferença entre sua posição final e a posição
inicial. Dependendo do processo escolhido para estabelecer a posição, podemos ter
o deslocamento escalar e o deslocamento vetorial.
Código da Disciplina: 1EB176 – FÍSICA I
85
FAAP – Faculdade Engenharia
Sejam s e s’ as coordenadas de posição
Ω’
P(t)
∆s
da partícula nos instantes t e t’ (t’ > t).
Denominamos deslocamento escalar ∆s
s
da partícula, no intervalo de tempo ∆t, a
C
s'
variação ocorrida na coordenada de
P’(t’)
s
posição, ou seja, a seguinte grandeza
Fig. 2.3
escalar.
∆s = s'−s
(2.5)
Deslocamento vetorial
Consideremos o movimento curvo de uma
y
•
partícula em relação ao referencial Oxy,
r
posições definidas pelos vetores posições
Denominamos
deslocamento
•
θ
x
Fig. 2.4
seja, a grandeza vetorial.
∆r = r ' − r
• P’(t’)
C
s
r '
vetorial da partícula no intervalo de tempo
∆t = t’ – t, a variação do vetor posição, ou
∆s
∆r
sobre trajetória C. Sejam P(t) e P’(t’) as
r er .
P(t)
(2.6)
Observe que desta definição decorre que o deslocamento vetorial depende apenas
da posição final P’(t’), e da posição inicial P(t), não dependendo da trajetória descrita
pela partícula.
Sendo
r = xi + y j
e
r ' = x' i + y' j
resulta
∆r = (x'−x) ⋅ i + (y'−y)j
∆r = ∆xi + ∆y j
ou
O módulo de deslocamento vetorial é
∆r =
( ∆x )2 + ( ∆y )2
(2.7)
(2.8)
note que, em geral
∆ r =≤ ∆ s
(2.9)
Código da Disciplina: 1EB176 – FÍSICA I
86
FAAP – Faculdade Engenharia
Cinemática do Movimento Curvo Plano
Objetivo:
Analisar a Velocidade num Movimento Curvo
Resumo da Aula
2.3 Movimento curvo: velocidade
Seja um movimento curvo e ∆r o
deslocamento vetorial da partícula no
intervalo de tempo
∆t = t’ – t (t’ > t)
y
•
P(t)
∆r
P’(t’)
•
vm
s
•
θ
x
Fig. 2.5
Chamamos, por definição, velocidade vetorial média da partícula no intervalo de
tempo ∆t, o quociente entre ∆r e ∆t:
vm=
∆r
∆t
(2.10)
Notamos que, sendo ∆t uma grandeza escalar positiva, resulta que ∆r e vm têm
sempre a mesma direção e o mesmo sentido.
Por definição, chama-se velocidade vetorial instantânea ou simplesmente velocidade
da partícula, o limite da velocidade vetorial média para intervalo de tempo tendendo
a zero:
v=
lim ∆r dr
=
∆t → 0 ∆t dt
(2.11)
A velocidade de uma partícula é a derivada do vetor posição em relação ao tempo,
derivada esta correspondente ao instante considerado.
Analisamos agora o módulo, a direção e o sentido da velocidade. Com
r = r (s) e s = s(t) escrevemos:
v =
dr ds dr
= ⋅
dt dt ds
Código da Disciplina: 1EB176 – FÍSICA I
87
(2.12)
FAAP – Faculdade Engenharia
Consideremos as posições P(t) e P’(t’),
nos instantes t e t’ (t’ > t),
respectivamente. No intervalo de tem pó
ct = t’ – t seja ∆r o deslocamento vetorial
e
∆s
o
deslocamento
escalar.
Aproximando-se P’(t’) de P(t), ∆s diminui,
µt
v•
P(t)
•
•
vm"
P”
•
vm'
•
P’
acontecendo o mesmo ∆r .
s
Quando fazemos no limite ∆t 0, t’ t, P’(t) P(t), ∆r ∆s e a direção ∆r
tende à direção da tangente à trajetória em P(t). Portanto, o vetor ∆r /∆s tende a um
limite u t , que é um vetor unitário tangente (versor tangente) à trajetória em P(t), cujo
sentido coincide sempre com o sentido positivo da trejetória, ou seja, dos
crescentes.
lim ∆ r
dr
Portanto:
(2.13)
µ t =
=
∆ t → 0 ∆s
ds
dr
ds dr
=
⋅
µ
dt
dt ds t
Para a velocidade v , concluímos:
Substituindo na Eq. 2.12
•
Módulo: v =
v =
(2.14)
dr
ds
=
dt
dt
•
•
Direção: tangente à trajetória na posição considerada
Sentido: sempre do movimento
ds
Concordante com µ t se
>0
dt
ds
Discordante de µ t se
<0
dt
É usual denominar-se velocidade escalar v da partícula a grandeza escalar ds/dt que
figura na Eq. 2.14.
É evidente que a velocidade vetorial e a velocidade escalar têm mesmo módulo.
v = v
e
v = ±v
Se um dado problema não fornecer elementos para decisão em relação ao duplo
sinal, adotamos o sinal positivo (+), ou seja, orientamos a trajetória no sentido do
movimento.
Código da Disciplina: 1EB176 – FÍSICA I
88
FAAP – Faculdade Engenharia
Objetivo:
Movimentos Circulares
Resumo da Aula
Movimentos Circulares
Denomina-se movimento circular todo movimento cuja trajetória é uma circunferência
ou um arco de circunferência.
Consideremos
uma
partícula
que
v
descreve uma circunferência de centro 0
P(t)
e raio R. Na trajetória, escolhamos uma
R
origem Ω e um sentido positivo para a
θ
s
+
medida dos espaços s.
Ω
Seja P(t) a posição da partícula num instante t; este ponto é determinado pela
coordenada de posição ou espaço s = ± ΩP e também pelos espaços.
s = ± ΩP
±
N ⋅ 2πR
sendo N um número inteiro e positivo qualquer. A cada espaço s corresponde um
ponto P; a cada ponto P correspondem infinitos espaços s.
É mais fácil medir um ângulo do que um arco de circunferência; daí a conveniência
da noção do ângulo horário. Entende-se por ângulo horário ou abscissa angular da
partícula o ângulo θ entre o eixo 0Ω e o raio vetor 0P do ponto P, sendo o sentido
positivo de θ concorde com o sentido positivo de s (Fig. 2.14).
A lei horária de um movimento pode ser dada em forma linear, isto é, espaço em
função do tempo s = s(t) ou em forma angular, isto é, ângulo em função do tempo θ
= θ(t).
Em tudo o que se segue, salvo declaração contrária, fica subentendido que os
ângulos sejam medidos em radiamos (símbolo rad); sob esta condição:
s = R. θ
(2.27)
Derivando em relação ao tempo:
v=
ds
dθ
=R
dt
dt
Código da Disciplina: 1EB176 – FÍSICA I
89
FAAP – Faculdade Engenharia
Denominamos velocidade angular ω, da partícula no instante t a derivada do ângulo
horário em relação ao tempo:
ω=
dθ
dt
A velocidade angular mede-se habitualmente em rad/s.
Substituindo-se, vem
V=Rω
Significa dizer que, em cada instante, a velocidade escalar da partícula é o produto
do raio da trajetória pela velocidade escalar angular.
Derivando a Eq. 2.29 em relação ao tempo:
dv
dω
at =
=R
dt
dt
Denominamos aceleração angular ∝ da partícula no instante t a derivada da
velocidade angular em relação ao tempo; sua unidade é rad/s2.
dω
∝=
dt
Substituindo-se:
at = R. ∝
Significa dizer que a aceleração tangencial escalar, em cada instante, é o produto do
raio da trajetória pela aceleração escalar angular.
Executando-se os pontos de parada (v = 0), uma partícula executando movimento
circular possui aceleração normal (aceleração centrípeta), cuja intensidade é
v2
an =
= ω2 ⋅ R
R
As grandezas cinemáticas angulares apresentadas são escalares; definem-se
também grandezas cinemáticas angulares vetoriais.
Entende-se por ângulo horário vetorial θ da partícula o vetor representado pelo
segmento orientado com origem 0, direção perpendicular ao plano do ângulo θ, e
sentido dado pela regra da mão direita: empunhando com a mão o vetor em
questão, de modo que o polegar aponte o sentido do mesmo, os demais dedos
indicam o sentido de rotação que, a partir de 0Ω conduz a 0P (Fig. 2.15).
Código da Disciplina: 1EB176 – FÍSICA I
90
FAAP – Faculdade Engenharia
Objetivo:
Movimento Circular Uniforme
Resumo da Aula
Movimentos Circular Uniforme
Uma partícula P com massa m descreve trajetória circular com centro O e Raio R;
r
r
sua velocidade v tem intensidade invariável. A aceleração tangencial at = 0 ; a
r
aceleração normal an = v 2Û n = ω2 RÛ n .
Assim:
∑ Fit
= m.at = 0
v2
∑ Fin = m.an = m R
= mω2 R
Aplicações:
Um pássaro realiza um vôo planado descrevendo uma trajetória circular horizontal.
O ângulo em relação à horizontal segundo o qual ele inclina as asas é estimado em
φ = 25° e ele gasta o tempo t = 13s para efetuar uma volta completa. Dado
g = 9,8 m s 2 , calcule a velocidade do pássaro e o raio da trajetória. Suponha que a
força de sustentação provocada pelo ar seja perpendicular às asas dos pássaros.
Solução
mv 2
R
N cos φ = mg
v2
R
∑ Fy = 0
∑ Fn = m
N sen φ =
portanto
2
tgφ =
R=
v=
2πR
T
Código da Disciplina: 1EB176 – FÍSICA I
91
gT 2
4π 2
v 2 2πR 1
=
Rg T Rg
tgφ
R = 19,6m
v = 9,46 m
s
(=34km/h)
FAAP – Faculdade Engenharia
Exercícios Propostos
1. Um menino gira uma pedra com massa m = 0,30 kg em uma circunferência
localizada num plano horizontal à altura h=2,0m do solo, por meio de um fio com
comprimento l=2,5m. Suponha que o fio arrebente e a pedra seja atirada
horizontalmente, atingindo o solo à distancia d=10m. Qual era a tração no fio
enquanto a pedra estava em movimento circular uniforme? Dado g=10m/s2.
2. Um automóvel percorre com velocidade v=30m/s uma curva horizontal com raio
R=90m em uma estrada em nível (sem sobrelevação). Dado g=10m/s2.
1. Calcule o menor coeficiente de atrito u entre os pneus e a pista para não
haver derrapagem.
2. Calcule o Angulo de sobrelevação φ da pista, para que a segurança do
veiculo na curva não dependa do atrito.
Objetivo:
Exercícios Propostos
Resumo da Aula
1. Uma roda gigante com raio R = 5,0 m em movimento uniforme, efetua uma volta
completa no tempo T = 10s. Dado g = 9,8 m/s2
a) Calcule a diferença entre os pesos aparentes de um passageiro nos pontos
mais baixo e mais alto da trajetória, expressando-a como fração do peso
real.
b) Qual seria a duração de uma volta se o peso aparente no ponto culminante
fosse nulo?
c) Neste caso, qual seria o peso aparente no ponto mais baixo, em função do
peso real P = mg?
d) O que acontecerá, se na situação do item (b), o cinto de segurança se
rompesse e o passageiro não conseguisse se afirmar no assento?
2. Um menino gira uma pedra com massa m = 0,30 kg em uma circunferência
localizada num plano horizontal à altura h = 2,0 m do solo, por meio de um fio com
comprimento l = 2,5 m. Suponha que o fio arrebente e a pedra seja atirada
horizontalmente, atingindo o solo à distância d = 10 m. Qual era a tração no fio
enquanto a pedra estava em movimento circular uniforme? Dado g = 10 m/s2.
3. A linha média de um trecho de rodovia
situa-se em um plano vertical e tem o
perfil indicado na figura. O raio de
curvatura é R = 40,0 m e g = 9,81 m/s2.
Um carro com massa m = 900 kg
percorre a baixada com velocidade
v = 15,0 m/s. No ponto mais baixo da pista, calcule:
Código da Disciplina: 1EB176 – FÍSICA I
92
FAAP – Faculdade Engenharia
a) a força que a pista exerce no carro
b) a velocidade que o carro deveria ter para comprimir-se contra a pista com o triplo
de seu peso.
4. A linha média de um trecho de rodovia
situa-se num plano vertical e tem o
perfil indicado no esquema. O raio de
curvatura é R = 80 m, g = 9,8 m/s2 e o
θ = 60°. Um carro percorre a lombada
com velocidade v = 10 m/s. Calcule a força que a pista exerce no carro nos pontos A
e B e a maior velocidade que o carro pode ter nos pontos A e B sem que se destaque
da pista nestes pontos
Código da Disciplina: 1EB176 – FÍSICA I
93
FAAP – Faculdade Engenharia
EXPERIÊNCIAS
Algarismos Significativos
1. Introdução
Verifica-se que a medida de uma grandeza física qualquer, é sempre de uma
incerteza intrínseca ao processo de medição, tanto em relação ao instrumento
utilizado como ao operador. Torna-se, então, necessário considerar o conceito
denominado de “algarismos significativos” durante qualquer processo de medição,
envolvendo uma medida.
Portanto o resultado de uma medida deve ser expresso com um número de
algarismo que seja compatível com a precisão obtida durante o processo de
medição e nenhum algarismo a mais, deve ser acrescentado.
Para ilustrar essa idéia vamos supor que dispomos de uma régua cuja escala
esteja graduada apenas em centímetros, e que desejamos medir com ela a distância
d entre os pontos A e B, conforme mostra a figura abaixo.
d
A
B
0 1
2 3
4 5
6
7 8 9 10 11 12 13 14 15 16 17 18 19 20
Como a menos divisão da escala e u = 1 cm, a medida d deverá ser:
d = 17 cm + fração de u
Os 17 cm inteiros são facilmente identificados por qualquer operador, porém,
sobre a fração de u é onde reside a incerteza da medida, sendo que esta somente
poderá ser estimada pelo operador, pois depende de sua destreza experimental.
Se vários operadores efetuarem a medida do comprimento d, com certeza, todos
concordariam com os 17 cm inteiros, mas é certo também que haverá discordância
em relação aos décimos de centímetros, que seriam avaliados diferentemente por
cada um, de acordo com sua habilidade experimental e limites de percepção.
As medidas poderiam ser por exemplo:
d = 17,6 cm
d = 17,7 cm
d = 17,8 cm, etc..., de acordo com a prática de cada operador.
Estas medidas poderiam ser melhoradas sob o ponto de vista de precisão, se
tivéssemos uma régua graduada em milímetros. Porém de qualquer forma, mesmo
utilizando um instrumento de medida mais preciso, sempre teremos problema para
avaliar o último algarismo da medida (aquela da direita).
Assim nasce o conceito de “algarismos significativos” ou seja, de uma
necessidade experimental.
Chamamos algarismos significativos de uma medida todos aqueles considerados
corretos, mais aquele que se tem dúvida.
Código da Disciplina: 1EB176 – FÍSICA I
94
FAAP – Faculdade Engenharia
2. Como Estabelecer
Corretamente?
o
Número
de
Algarismos
Significativos
(A.S.)
O número de algarismos significativos de uma medida são contados da esquerda
para a direita, a partir do primeiro algarismo não nulo. São computados como
significativos todos os algarismos corretos mais o último chamado duvidoso, e mais
nenhum.
Exemplo: a medida 438, 56 cm tem 5 algarismo significativos, dos quais o 4, 3, 8
e 5 são corretos e o 6 é o duvidoso.
É claro que, como já dissemos, cada medida deve ter o número de algarismos
significativos compatível com a precisão do instrumento utilizado no processo de
medição.
Não devemos confundir, casas decimais (CD) com algarismos significativos. O
deslocar da virgula não influencia na quantidade de algarismos significativos,
devendo-se geralmente ao ajuste de unidades ou a uma melhor apresentação da
medida.
Exemplo:
35,64 cm ---- 2CD e 4AS
3,564 dm ---- 3CD e 4AS
0,3564 m ---- 4CD e 4AS
Também devemos ressaltar que o zero à esquerda não é contado como
algarismo significativo, em hipótese nenhuma.
Exemplo:
30,4 ---- 3AS e 1CD
0,48 ---- 2AS e 2CD
Resumindo
Os algarismos corretos são todos os algarismos sobre os quais temos certeza na
medida. Os algarismos duvidosos e o algarismo significativo cujo valor temos dúvida
ou onde há incerteza experimental, normalmente é o último algarismo da direita.
3. Notação Científica e Conversão de Unidades
Ao fazer-se a conversão de unidades deve-se ter cuidado para não se alterar a
precisão do resultado obtido. Após efetuar a conversão, a quantidade de algarismos
significativos da medida não poderá ser alterada, em nenhum caso. Por isso é
conveniente escrever a medida utilizando a Notação Científica. E a regra
fundamental para usar a Notação Científica é representar a medida com apenas um
algarismo diferente de zero à esquerda da virgula, respeitando-se a quantidade
correta de algarismos significativos e sua ordem de grandeza, através de potências
de 10.
Exemplo:
102,3 cm ou1,023 .102 cm ou 1,023 m.
Código da Disciplina: 1EB176 – FÍSICA I
95
FAAP – Faculdade Engenharia
4. Critérios de Arredondamento
Na apresentação de uma medida devemos, necessariamente, respeitar as
pressões dos instrumentos utilizados e para isso, geralmente, precisamos fazer
ajustes nas medidas, desprezando as casas decimais que estão fora de precisão
desejada. Essa operação é denominada Arredondamento, e suas regras básicas
são estabelecidas pela Associação Brasileira de Normas Técnicas (ABNT): P – NB –
87 – 1961 apresentados em anexo.
É importante observar, que o aluno conheça as regras da ABNT, porém em
nosso trabalho em laboratório, é possível fazermos algumas simplificações nessas
regras, dado as precisões envolvidas, de forma a tomar o trabalho mais ágil sem
perda de qualidade. Para tanto, adotaremos os seguintes procedimentos.
4.1.
Quando o algarismo situado imediatamente após o duvidoso for maior ou
igual a 5, aumenta-se uma unidade ao duvidoso abandonando-se os
demais.
Exemplo: a medida 5,7G85kg deverá ser expressa com 3 algarismos
significativos.
Resposta: 5,77 kg
4.2.
quando o algarismo situado imediatamente após o duvidoso for menor do
que 5, escreve-se até o algarismo duvidoso, mantendo-o, e eliminam-se
os demais.
Exemplo: a medida 2,743kg deverá ser expressa com 2 algarismos
significativos.
Resposta: 2,7kg.
5. Operações com Algarismos Significativos
Quando a medida de uma grandeza não é obtida diretamente, mas através de
operações com valor de outras grandezas, torna-se necessário saber quantos
algarismos significativos conterá o resultado de tal operação. Para isso utilizamos as
seguintes regras para operar com algarismos significativos;
1ª Regra – Adição e subtração: o resultado da operação deverá ter o mesmo
número de casas decimais que o termo de menor número em casas decimais.
Exemplo: 5,34 + 3,4 = 8,72 = 8,7
2ª Regra – Multiplicação, Divisão, Potenciação, Radiciação, etc...: o
procedimento mais simples consiste em efetuar a operação normalmente. O
resultado final deve conservar tantos algarismos significativos, quantos houver no
termo mais pobre (ou esse número mais um em operação intermediária).
Exemplo: 5,87 x 9,8 = 52,243 = 52
Código da Disciplina: 1EB176 – FÍSICA I
96
FAAP – Faculdade Engenharia
1ª Série de Exercícios Laboratório de Física I
Operações com algarismos significativos (I)
1. Preencha os espaços em branco indicando o número de algarismos significativos
corretamente e reescreva conforme a quantidade de algarismos significativos
pedidos.
( ) com 2 AS____________________
( ) com 2 AS____________________
( ) com 2 AS____________________
( ) com 1 AS____________________
( ) com 1 AS____________________
f) F = 78943 N
( ) com 1 AS____________________
g) E = 2,30020 J
( ) com 1 AS____________________
a) t = 0,465s
b) 1 = 5,47m
c) S = 3526,8m
2
d) m = 438,5kg
e) v = 2345,7m
3
2. Converter as medidas abaixo para unidades indicadas
a) t
= 3600s
b) t
= 5,47m
c) S = 648cm
2
d) m = 0,34g
=
h
=
cm
=
m2
=
kg
3. Resolva as seguintes operações:
a) 6,28 + 3,6 – 0,53 + 0,325 =
b) 35,48 – 0,2 + 9,061 =
c) 25985,6 x 0,02 =
d) 0,500 ÷ 3,2 =
e)
3,8
480,6
0,232
4. Calcule a Energia Cinética de um corpo de massa m = 0,5820 kg e velocidade v
1
= 12m/s. (Dado Ec = m.v 2 )
2
Código da Disciplina: 1EB176 – FÍSICA I
97
FAAP – Faculdade Engenharia
2ª Série de Exercícios Laboratório de Física I
Operações com Algarismos Significativos (II)
Nome:__________________________________________________________
Turma:_______________Data:_______________Professor________________
1. Calcule a força gravitacional entre duas massas m1 = 0,853kg e m2 = 5,434kg,
quando estiverem a uma distância de 5,0m entre si.
Dado: Fg = G
m1m 2
e G = 6.673.10 -11N.m 2 .kg −2
d2
2. Ache o volume de uma esfera com raio r = 10,32m, adotando π = 3,14.
(Dado V =
4
πR 3 )
3
3. Um paralelepípedo de lados a, b e c tem as seguintes dimensões:
a = 3,4m, b = 12,8m e c = 30,6m
Determine:
a) Volume
b) Densidade
Código da Disciplina: 1EB176 – FÍSICA I
98
FAAP – Faculdade Engenharia
EXPERIÊNCIA 2
Elementos de Teoria dos Erros
1. Introdução
Quando dois observadores fazem a medida do comprimento de uma peça
utilizando um mesmo instrumento e nas mesmas condições ambientais, ou ainda,
quando um observador realiza duas vezes a mesma medida de uma peça nas
mesmas condições, é comum que os resultados obtidos sejam diferentes.
Esta diferença não é necessariamente um “erro” de quem as executou, é na
verdade uma conseqüência do fato de que qualquer medida é independente de
qualquer outro resultado obtido para ela.
A posição do instrumento, o modo de observação, ou mesmo a posição da peça
que foi utilizada para se fazer a nova medida, foram modificadas, ou seja, as
condições da primeira medida, ou do operador, podem não terem sido
necessariamente repetidas, de modo que se obtém um novo valor na segunda
medida.
Se essa medida for repetida um número “n” de vezes, obteremos uma grande
variedade de resultados. Isto pode levar à questão: Qual deles é o melhor valor para
representar essa grandeza?
2. Melhor Valor Experimental ou Valor Médio
O melhor valor experimental que representa uma grandeza medida em função de
n valores individuais é definida por:
n
x + x 2 + x 3 + ... + x i + ... + x n
X= 1
n
ou
X=
∑x
i=1
i
n
n
onde
∑x
i
, representa a soma de todos os valores xi medidos
i =1
O valor x também é conhecido como valor médio da grandeza. Ele representa um
valor “intermediário” em torno do qual os valores obtidos se distribuem.
x
x5
x4
x1
x3
x7
x
x2 x6
A variação dos diversos valores individuais medidos em torno do valor médio é
devido a erros estatísticos que ocorrem todas as vezes que fazemos medidas. As
causas dos erros estatísticos são diversos:
-
irregularidade da peça;
-
empunhadura do instrumento;
-
posicionamento do observador em relação ao instrumento; e sobre elas
não temos controle.
Código da Disciplina: 1EB176 – FÍSICA I
99
FAAP – Faculdade Engenharia
3. O Desvio Absoluto de uma Medida
Pela própria definição de valor médio, as medidas, devido aos erros estatísticos,
se distribuem em torno da média. Podemos então, definir uma grandeza que forneça
uma medida de quanto cada valor experimental esta distante do valor médio.
Chamamos de desvio absoluto de uma medida (di) a diferença dada por: di = xi – x
Como o valor médio representa um ponto que divide simetricamente os pontos
experimentais devemos ter ora desvios positivos, ora negativos e percebe-se assim
que a soma de todos os desvios de um conjunto de medidas deve tender a zero.
n
∑ di 0 Obs: a soma será zero para um grande número de medidas.
i =1
4. Média dos Desvios
Este conceito não tem muita utilidade prática. Ele é definido por:
n
d=
∑ di
i=1
n
n
Se num conjunto de n medidas (sendo n bastante alto)
∑ di = 0 , a média destes
i =1
desvios deve ser, também zero. Desse modo o d serve para uma verificação do
valor médio experimental obtido.
5. Desvio Médio (dm)
A dispersão de uma referencia sobre como os dados de um conjunto de n
valores experimentais se espalham em torno do valor médio.
Uma maneira de fazer esta medida é através do desvio médio (note que este
conceito é diferente da média dos desvios).
O desvio médio é dado por:
n
dm =
∑x
i=1
i
−x
n
O conceito desvio médio pode ser interpretado como a média da distância que
cada ponto xi tem do valor médio x.
Ao contrário da média dos desvios, o desvio médio, não é um valor que
representa sempre um valor positivo.
Atenção: o desvio médio deverá ser arredondado para um único algarismo
significativo.
Código da Disciplina: 1EB176 – FÍSICA I
100
FAAP – Faculdade Engenharia
6. Desvio Padrão (σ)
σ=
∑ di
2
n −1
Atenção: o desvio padrão deverá ser arredondado para um único algarismo
significativo
7. Desvio Relativo
É a razão entre o desvio médio da medição e o valor médio
dr =
dm
x
8. Desvio Percentual
d% = dr . 100
Quando se diz que o erro é de 2%, significa que foi cometido um erro de 2
unidades para cada 100 das mesmas. Para avaliar a qualidade de uma medição, o
desvio relativo é mais importante que o desvio absoluto.
Convenciona-se apesar o desvio relativo e o percentual com apenas dois
algarismos significativos.
9. Apresentação do Resultado de uma Série de Medidas
O resultado de uma série de medidas de uma grandeza deve ser apresentado do
seguinte modo:
x = (x ± σ) unidade
Obs: Respeita-se o número de casas decimais do valor médio e o desvio.
Exemplo: t = 4, 35
{ ± 0, 02
{ s
2 CD
2 CD
10. Exemplo Resolvido
Numa experiência de queda livre, através da utilização de um cronômetro que
fornecia leituras de até centésimos de segundos, foram obtidos os seguintes
resultados:
t(s): 2,35; 2,25; 2,28; 2,32; 2,38; 2,31; 2,32; 2,27; 2,33; 2,30
Calcular:
a) o valor médio do tempo;
b) os desvios absolutos;
c) o desvio médio;
d) o desvio padrão
e) o desvio relativo;
Código da Disciplina: 1EB176 – FÍSICA I
101
FAAP – Faculdade Engenharia
f) o desvio percentual;
g) apresentar o resultado da série de medidas
Solução:
a) t =
∑ ti = 23,11 = 2,31s
n
10
b) d1
= t1
-
t
=
2,35 -
2,31 =
0,04s
d2
= t2
-
t
=
2,25 -
2,31 =
-0,06s
d3
= t3
-
t
=
2,28 -
2,31 =
-0,03s
d4
= t4
-
t
=
2,32 -
2,31 =
0,01s
d5
= t5
-
t
=
2,38 -
2,31 =
0,07s
d6
= t6
-
t
=
2,31 -
2,31 =
0,00s
d7
= t7
-
t
=
2,32 -
2,31 =
0,01s
d8
= t8
-
t
=
2,27 -
2,31 =
-0,04s
d9
= t9
-
t
=
2,33 -
2,31 =
0,02s
d10
= t10
-
t
=
2,30 -
2,31 =
-0,01s
c) Desvio médio
n
dm =
∑x
i =1
1
−x
=
n
∑ dt
n
1
=
0,29
= 0,029 = 0,03s
10
c’) Desvio Padrão
σ=
∑S
2
i
n −1
= 0,04s
d) Desvio relativo
dr =
dm 0,03
=
= 0,01298 = 0,013
t
2,31
e) Desvio percentual
d% = dr . 100 = 1,3%
f) Resultado
t = (2,31 ± 0,04)s
Código da Disciplina: 1EB176 – FÍSICA I
102
FAAP – Faculdade Engenharia
Série de Exercícios de Laboratório Física 1
Elementos de Teoria dos Erros – 1
Para as séries de medidas abaixo, determine:
a) o valor médio do tempo;
b) os desvios absolutos;
c) o desvio médio;
d) o desvio padrão
e) o desvio relativo;
f) o desvio percentual;
g) a apresentação dos resultados da série de medidas
1. Ao medir o diâmetro de uma peça, com um paquímetro, foram obtidos os
seguintes resultados:
d(cm) = 8,45; 8,40; 8,35; 8,50; 8,35; 8,40; 8,45; 8,35; 8,40; 8,35.
Série de Exercícios de Laboratório Física 1
Elementos de Teoria dos Erros – 2
Para a série de medidas abaixo, determine:
a) o valor médio do tempo;
b) os desvios absolutos;
c) o desvio médio;
d) o desvio relativo;
e) o desvio percentual;
f) a apresentação dos resultados da série de medidas
1. Com um instrumento de medição, foram obtidos os seguinte resultados:
s(cm) = 0,348; 0,350; 0,360; 0,345; 0,354; 0,340; 0,342; 0,358; 0,348; 0,352.
2. Numa experiência, foram obtidos as seguintes forças:
F(N): 0,081; 0,080; 0,085; 0,078; 0,080; 0,083; 0,079; 0,082; 0,078; 0,083.
3. Com um amperímetro foi medida a intensidade da corrente elétrica que passa
através de uma resistência, sendo obtidos os resultados:
i(A): 0,842; 0,851; 0,848; 0,845; 0,847;0,845; 0,864; 0,852; 0,846; 0,850.
Código da Disciplina: 1EB176 – FÍSICA I
103
FAAP – Faculdade Engenharia
Experiência 3 : Instrumentos de Medida
1. Objetivo
-
Familiarização com o uso do paquímetro
-
Familiarização com o uso da balança de braço
-
Determinação do volume do cilindro
-
Determinação da densidade do cilindro
2. Material utilizado
-
Paquímetro
-
Balança de Braço
-
Cilindro metálico
3. Introdução teórica
a) Paquímetro
O paquímetro é um instrumento constituído de uma régua metálica graduada,
terminada por uma espera fixa, ao longo da qual desliza uma espera móvel, na qual
existe uma janela onde estão acoplados um NÔNIO e um parafuso de pressão que
permite a sua fixação (figura 1a).
a)
Orelha
Parafusos de
Fixação
Haste de Medida
de Profundidade
Espera
Fixa
Espera
Móvel
Nônio
Impulsor
Escala
Principal
b)
Figura 1. a) Paquímetro; b) Medida externa utilizando as esperas; Medida interna
utilizando as orelhas e medida de profundidade utilizando a haste.
Código da Disciplina: 1EB176 – FÍSICA I
104
FAAP – Faculdade Engenharia
Acoplado a espera móvel existe uma haste destinada a medir profundidade de
cavidades. Quando as duas esperas se tocam, o zero do nônio deve coincidir com a
marca zero da escala principal do paquímetro.
O nônio ou venier, inventado por Pierre Vernier (1580/1637) é uma segunda
escala que permite a leitura de frações da menor divisão de uma escala principal.
O nônio é dividido num certo número de partes iguais e de valor conhecido,
podendo deslocar-se paralelamente a escala graduada em divisões de valor
conhecido.
Define-se NATUREZA (N) DO NÔNIO, com sendo a razão entre o valor da
menor divisão da escala principal e o número de divisões do nônio.
Figura 2. Representação da escala principal e do nônio. Na figura o nônio tem 20 divisões, cad divisão corresponde a 1 20 da
menor divisão da escala principal.
Na ilustração da figura 2, a menor divisão da escala principal é 1 mm como se
pode facilmente observar o nônio tem 20 (vinte) divisões, assim sendo sua natureza:
N =
1
mm = 0 , 05 mm
20
Para efetuarmos uma leitura do comprimento de um corpo, devemos proceder
da seguinte forma:
a) Calcula-se a natureza do nônio;
b) Ajusta-se de forma conveniente o instrumento sobre o objeto de modo que
as duas esperas toquem as superfícies laterais do objeto:
c) Lê-se o número L0 da escala principal, correspondendo ao traço da régua
que encontra-se imediatamente antes do traço zero do nônio (vide figura a
seguir). Esse número representa a parte inteira da medida.
d) Lê-se no nônio o número i correspondente ao traço do nônio que coincide
com um dos traços da escala principal;
e) O valor do comprimento é L é dado por:
L = L0 + i⋅ N
Código da Disciplina: 1EB176 – FÍSICA I
105
FAAP – Faculdade Engenharia
Figura 3. Medida externa de uma peça
OBS: Alguns instrumentos permitem a leitura de um valor intermediário entre duas
marcas que definem a menor divisão de sua escala, isto porque a distância entre
duas marcas é grande o suficiente para a avaliação de um valor intermediário entre
elas, nestes casos, podemos fazer a leitura da medida até este algarismo
intermediário que está sendo avaliado. E o caso da balança de braço com que
trabalharemos.
A) Balança de Braço
A balança de braço tem por princípio o equilíbrio de forças aplicadas em dois
pontos distintos ao longo de um braço móvel que se apóia num ponto determinado.
O braço da balança na condição zerado deve estar em equilíbrio, ou nivelado. A
aplicação de uma força num ponto qualquer deste braço provoca um momento que o
faz movimentar em torno do ponto de apoio.
Num dos lados do braço encontramos o prato da balança, onde coloca-se o
corpo cuja massa se quer determinar. Do lado oposto do braço temos 3 massas (ou
dependendo da balança) que se movem sobre escalas graduadas e cuja finalidade é
buscar estabelecer o equilíbrio perdido em função da colocação da massa no prato.
Estas massas que se movem nas escalas graduadas dão leitura da massa do corpo.
Como já citado, a balança de braço que utilizaremos em nosso curso permite a
leitura de uma fração da menor divisão de sua escala. Esta fração será avaliada pelo
observador e incluída no resultado da medida.
Parte Experimental
1. Nesta primeira atividade você deverá medir com o paquímetro o diâmetro D e a
altura H do cilindro e anotar os resultados na tabela.
Em seguida feche o paquímetro e passe-o ao seu parceiro de equipe para ele
efetuar as mesmas medidas anteriores. Repetir a operação até completar 15
medidas de cada comprimento. É importante observar que cada operador vai
fazer duas medidas diferentes. Ou seja, todos da equipe deverão fazer as
mesmas medidas de comprimento, porém você perceberá que estas medidas
não deverão coincidir necessariamente. Enfim, todos deverão operar e manusear
o paquímetro.
Código da Disciplina: 1EB176 – FÍSICA I
106
FAAP – Faculdade Engenharia
2. Determinar a natureza do paquímetro
N = _______________=_______________mm
3. Efetuar 15 medidas de altura H e do diâmetro do cilindro, e anotar os valores na
tabela abaixo:
N
(H ± )mm
(D ± )mm
H mm
D mm
(Hi -
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
∑
4. Medir a massa do cilindro utilizando a balança.
±
M(
)g
5. Cálculos
a) Calcule o volume do cilindro: V =
V=(
±
π 2
⋅D ⋅H
4
)mm3
b) Calcule a densidade do cilindro:
P = m/V P = (
±
) g/mm3
c) Calcule o erro percentual relativo da densidade.
Código da Disciplina: 1EB176 – FÍSICA I
107
H ) mm
(Di -
D ) mm
FAAP – Faculdade Engenharia
Experiência 4: Instrumentos de Medida II
1. Objetivos:
-
Aprender a usar o micrômetro
2. Materiais utilizados
-
Micrômetro
-
Esfera de Aço
-
Balança de prato
3. O Micrômetro
O micrômetro é um instrumento que permite medidas com precisão de milésimo
de milímetro (0,001 mm), ou seja: mícron. daí a origem do nome deste instrumento.
Comparado com o paquímetro, o micrômetro fornece valores de medidas bem
mais precisos, por outro lado, ele apresenta um limite de escala pequeno, servindo
para medidas de comprimento maiores.
Basicamente, o micrômetro (figura 1) é constituído de um arco, tendo numa de
suas extremidades uma ponta fixa, na outra extremidade encontramos uma ponta
móvel ligada a um parafuso micrométrico que a cada volta completa, desloca esta
ponta, afastando-a ou aproximando-a da ponta fixa, de 0,5 mm.
Esta figura representa apenas esquematicamente um micrômetro, não indicando
suas partes componentes, que são: parafuso micrométrico, ponta móvel, ponta fixa,
trava, arco, catraca, tambor, escala do tambor (nônio) e escala principal.
Figura 1: Detalhes do Micrômetro
Código da Disciplina: 1EB176 – FÍSICA I
108
FAAP – Faculdade Engenharia
O acionamento do parafuso micrométrico é feito através de um tambor
graduado com 50 divisões. O giro de uma volta do tambor corresponde a uma volta
do parafuso. Deste modo temos que:
1 volta – 50 divisões –
1 divisão –
x=
0,5 mm
x mm
0,5
mm = 0,01mm
50
ou seja, cada divisão do tambor pode ser comparada ao nônio do paquímetro sendo
que a medida de usa menor divisão é o erro limite do instrumento e, em um
instrumento calibrado, uma leitura até esta casa decimal fornece um valor com nível
de confiança de aproximadamente 100% de ser verdadeiro.
A qualidade da construção do micrômetro permite que valores intermediários
entre duas marcas do tambor sejam avaliadas pelo observador, gerando assim
valores de medidas da ordem de milésimo de milímetro (0,001 mm).
Além da escala do tambor que dá a precisão da medida, existe a escala
principal gravada no cilindro fixo. Esta escala tem uma divisão em milímetro e uma
subdivisão de 0,5 mm que facilita a definição da medida.
Na extremidade do tambor temos um parafuso de fricção, ou catraca, com o
qual se deve girar o tambor. A função deste parafuso e evitar que se aperte a peça
entre as pontas da medição ou uma espera contra a outra o que pode desregular o
instrumento.
O micrômetro é ainda equipado com uma trava que permite a fixação da
haste móvel impedindo que a sua medida realizada tenha seu valor alterado,
facilitando assim sua leitura.
Como Medir:
Verifique antes de cada medida se o zero da escala principal coincide com o zero
do nônio quando o micrometro estiver completamente fechado, o que indica que o
instrumento está zerado.
Para se efetuar uma medida devemos colocar a peça entre as pontas de medição
(Figura 2) a do micrômetro girando o tambor através da catraca. Em seguida, na
escala fixa fazemos uma leitura com precisão de até 5 décimos de milímetros ,
verificando o traço que coincide com a borda do tambor (Figura 2b):
Figura 2. a) Medida da peça; b) Leitura da escala principal; c) Leitura do nônio
Código da Disciplina: 1EB176 – FÍSICA I
109
FAAP – Faculdade Engenharia
Para a leitura do nônio, ou seja da escala do tambor, busca-se qual valor
coincide com o traço do “zero” do cilindro fixo, avaliando-se o algarismo
intermediário entre duas marcas quando for necessário (Figura 2c).
Um cuidado que se deve tomar é de não confundir a medida de inteiros e meio
milímetros, para isto deve-se observar a marcação inferior da escala principal que
corresponde a 0,5mm. Se a borda do tambor tiver ultrapassado uma destas marcas,
em mm lido na escala do cilindro fixo.
Cuidados com o Instrumento
Como todo equipamento, deve-se evitar quedas ou choques do micrômetro. As
pontas dos encostos e o arco são construídos com metal de alta dureza para evitar
deformações. Por outro lado este metal pode quebrar se for forçado além de sua
capacidade.
Utilize a catraca para apoiar os encostos na peça a ser medida, acoplando-a
suavemente.
Parte Experimental
6. Medir com o micrômetro o diâmetro D da esfera, anotando o resultado na tabela.
Em seguida, feche o micrômetro e passe-o ao seu parceiro de equipe para ele
efetuar a medida. Repetir a operação até completar as 15 medidas da tabela.
Todos deverão operar e manusear o micrômetro.
7. Determinar a natureza do micrômetro.
N = ____________=____________mm
p=
0,01
mm = 0,005mm
2
8. Efetuar 15 medidas do diâmetro da esfera, e anotar os valores na tabela abaixo e
depois padrão.
Código da Disciplina: 1EB176 – FÍSICA I
110
FAAP – Faculdade Engenharia
(Di ± )mm
N
D mm
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
∑
±
D=(
)mm
9. Medir a massa da esfera utilizando a balança.
±
m(
)g
10. Cálculos
a) Calcule o volume do cilindro: V =
V=(
±
π 3
⋅D
6
)mm3
b) Calcule a densidade do cilindro:
ρ−
m
⇒ρ =(
v
±
) g/mm3
c) Calcule o erro percentual relativo da densidade.
Código da Disciplina: 1EB176 – FÍSICA I
111
(Di – D)mm
FAAP – Faculdade Engenharia
Experiência : Anamorfose
Introdução:
Devemos nos lembrar das duas ultimas experiências realizadas, de que os
gráficos até então construídos se referiam as funções do 1º grau. Todavia, é
importante destacar que nem sempre um fenômeno físico pode ser interpretado por
funções do 2º, 3º grau, Logarítmicas, Exponenciais, etc.
Também é conveniente ressaltar que nem as funções cujos gráficos são
retilíneos, além de serem facilmente interpretados, estes gráficos são de construção
imediata. Assim sendo, em determinados casos, nos quais a função estudada não é
do 1º grau, podemos, através de uma mudança de variáveis, “transformá-la” de
modo que o gráfico possa ser retilíneo. Este processo é chamado de
ANAMORFOSE e é muito utilizado na prática.
Outra aplicação comum do processo de Anamorfose é no estudo do Pêndulo
Simples, que verificaremos no exemplo seguinte.
Código da Disciplina: 1EB176 – FÍSICA I
112
FAAP – Faculdade Engenharia
Admitimos que um astronauta tenha efetuado algumas médio s com um pêndulo
simples, na Lua, e obteve os dados constantes na tabela abaixo. Qual será o módulo
da aceleração gravitacional na superfície da Lua?
l(s)
t(s)
10,0
1,57
14,4
1,88
25,6
2,51
40,0
3,14
57,6
3,77
Primeiramente devemos verificar que a expressão do período pode ser
reescrita da seguinte forma:
l=
g 2
T ou
4π 2
l = a.k
onde
a
(coeficiente angular) =
g
4π 2
e k = T2, aplicando o processo de Anamorfose e representando-se a função do 1º
grau l = f (k).
Em seguida reescrevemos a tabela em função de k e construímos o
respectivo gráfico de acordo com as instruções das experiências.
l(cm)
t(s)
K=T2(s2)
10,0
1,57
2,46
14,4
1,88
3,53
25,6
2,51
6,30
40,0
3,14
9,86
57,6
3,77
14,2
Num papel 10 cm x 10 cm, teremos o gráfico abaixo
10cm
= 0,210 cm/cm ∴ d l = 0,210.(g − 10,0)cm
(57,6 − 10,0)cm
10cm
λk =
= 0,852 cm/s 2 ∴ d k = 0,852.(g − 2,46)cm
2
(14,2 − 2,46)s
λl =
Código da Disciplina: 1EB176 – FÍSICA I
113
FAAP – Faculdade Engenharia
d l 1 = 0 , 210 ( 10 ,0 − 10 , 0 ) = 0
d l 2 = 0 , 210 ( 14 , 4 − 10 , 0 ) = 0 ,924 cm
d l 3 = 0 , 210 ( 25 , 6 − 10 , 0 ) = 3 , 28 cm
d l 4 = 0 , 210 ( 40 , 0 − 10 , 0 ) = 6 , 30 cm
d l 5 = 0 , 210 ( 14 , 2 − 10 , 0 ) = 10 , 0 cm
d k 1 = 0 , 852 ( 2 , 46 − 2 , 46 ) = 0
d k 2 = 0 , 852 ( 3 , 53 − 2 , 46 ) = 0 , 912 cm
d k 3 = 0 , 852 ( 6 , 30 − 2 , 46 ) = 3 , 27 cm
d k 4 = 0 , 852 ( 9 , 86 − 2 , 46 ) = 6 , 30 cm
d k 5 = 0 , 852 (14 , 2 − 2 , 46 ) = 10 , 0 cm
Código da Disciplina: 1EB176 – FÍSICA I
114
FAAP – Faculdade Engenharia
Experiência: Pêndulo simples
Objetivo:
Investigar a relação entre o período de um pêndulo simples e seu
comprimento. Determinação da aceleração da gravidade.
Material:
Pêndulo simples; cronômetro; fita métrica; paquímetro.
Introdução:
Um corpo qualquer, suspenso de um ponto de modo a poder oscilar, ou um
corpo móvel em torno de um eixo horizontal e sujeito exclusivamente à ação da
gravidade, é denominado pêndulo.
Considerar o movimento de um corpo de massa m, suspenso por um fio
inextensível de comprimento L e de massa desprezível. Devem ser satisfeitas as
condições:
dimensões do corpo « L
massa do fio
«m
Nessas condições, o sistema é denominado pêndulo matemático ou
pêndulo simples.
A condição necessária para que o movimento pendular seja harmônico
simples é que a força restauradora seja diretamente proporcional à elongação e de
sentido oposto.
Se F é a força restauradora e F = -k
simples.
Figura (1)
Código da Disciplina: 1EB176 – FÍSICA I
115
.
x, então o movimento é harmônico
FAAP – Faculdade Engenharia
No nosso caso, x = L ⋅ θ portanto, F = -k ⋅ Lθ. Na figura acima.
T = m . g. cos θ
P=m.g
F = m . g . sen θ é a força restauradora.
Como a força restauradora não é proporcional a θ mas o sen θ, logo o
movimento não é harmônico simples. Entretanto, se o ângulo θ é pequeno, sen θ é
aproximadamente igual a θ, ou seja, para oscilações de pequena amplitude, pode-se
fazer o desenvolvimento em série:
θ3 θ5
sen θ = θ +
−L
3! 5!
Em primeira aproximação, sen θ ≅ θ = x/L, e o arco x pode ser considerado
como uma pequena porção da tangente horizontal à trajetória. Assim,
F = −m ⋅ g ⋅ θ = −m ⋅ g ⋅ ( x / L )
(1)
e a força restauradora do equilíbrio é do tipo elástico.
O movimento será, portanto, harmônico quando as oscilações apresentarem
pequena amplitude; seu período será expresso por
m
L
T = 2π
= 2π
(2)
(m ⋅ g) / L
g
O período de um pêndulo simples independe da amplitude e da massa
pendular, fato este que caracteriza a “lei do isocronismo das pequenas oscilações”
(Galileu).
É conveniente ressaltar o fato de o movimento se realizar num plano vertical
contendo o ponto 0, quando a velocidade inicial é nula (nas posições extremas) ou
máxima (ao passar pela vertical). O movimento de um pêndulo simples é variado,
pois a velocidade não é constante nem uniformemente variada, não sendo a
aceleração tampouco constante.
O período pode ser calculado com qualquer precisão desejada tomando-se
um número suficiente de termos na série infinita.
L 12
θ 12 3 2
θ
T = 2π 1 2 sen 2 + 2 ⋅ 2 sen 4 + L
(3)
g 2
2 2 4
2
Quando θ = 15º (para qualquer lado da posição de equilíbrio), o período real
difere do que seria obtido pela expressão (2), de menos de 0,5%.
No caso desta experiência, usaremos ângulos menores de 15º, quando
poderemos nos valer da expressão (2).
A fim de comprovarmos que a expressão (2) pode ser utilizada para pequenos
ângulos, admitamos ser a equação do período simples do tipo
T = k ⋅ Ln
(4)
Aplicando-se logaritmos a ambos os membros de (4), teremos:
log T = log k + n ⋅ log L
(5)
que é a equação de uma reta. Sendo,
log T = y, log L = x e log k = b, obteremos y = a . x + b
onde a = declividade da reta, sendo o valor d en da Eq. (4).
Construindo-se um gráfico em papel di-log T versus L. obteremos uma reta do
0A
tipo apresentado na figura abaixo. n =
0B
Para que se possa obter a Eq. (2), n = 1/2.
Código da Disciplina: 1EB176 – FÍSICA I
116
FAAP – Faculdade Engenharia
T (s)
A
o
B
L (m)
Figura (2)
Procedimento
1. Medir o tempo de vinte oscilações completas de pêndulos com seis
comprimentos diferentes.
2. O comprimento L do pêndulo é a distância entre o ponto em que o fio é fixado até
o baricentro da esfera de massa m.
3. Medir o comprimento do fio com a fita métrica e o diâmetro da esfera de massa
m, com o paquímetro. Somar o raio da esfera ao comprimento do fio para obter
cada um dos valores de L. Anotar os resultados na Tab.1.
4. Construir em papel milimetrado o gráfico L versus T2.
5. A partir do gráfico, obter o valor de g, sabendo-se que g =
4 π 2L
T2
6. Calcular o erro percentual em g, considerando que, em São Paulo, g = 9,78 m/s2
7. Calcular o erro percentual da medida de g obtida em laboratório, admitindo-se
que ∆L = 0,001 m e ∆T = 0,01s.
∆g ∆L
∆T
=
+ 2.
g
L
T
8. Analisando os resultados obtidos, citar as possíveis fontes de erro.
9. Construir na folha de papel di-log um gráfico T versus L. Locar o eixo das
ordenadas no “segundo numero 1”, da escala logarítmica.
10. A partir do gráfico, calcular o valor de n, onde n = 0 A / 0B , lembrando-se de que
0 A e 0B são os logaritmos dos valores das grandezas T e L.
11. Considerar o quarto par de dados da Tab. 1 e verificar a validade da Eq. (5). Para
isso, calcular k =
2π
g
12. O período do pêndulo depende da massa? Justificar.
Código da Disciplina: 1EB176 – FÍSICA I
117
FAAP – Faculdade Engenharia
FOLHA DE DADOS
Experiência: Pêndulo simples
Aluno:__________________________________________Número:_____________
Turma:____________Grupo:_________________Data:_______________________
Professor:___________________________
1.
L(m)
t (tempo de 20
oscilações)
T= t/20
(s)
0,70
0,80
0,90
1,00
1,10
1,20
2. Construir o gráfico L versus T2 em papel milimetrado.
3. Do gráfico, obter o valor da aceleração da gravidade g.
g=
4. Calcular o erro percentual em g, admitindo g = 9,78 m/s2.
5. Calcular o erro percentual em g através da equação de erro.
6. Citar as possíveis fontes de erros nesta experiência.
7. Construir em papel di-log o gráfico T versus L.
8. Obter a partir do gráfico o valor de n.
n=
9. Qual a conclusão em relação ao valor obtido para n?
10. Verificar a validade da Eq. (5).
11. Qual o valor do log T em A? (Veja a Fig. 2).
12. O período depende da massa do pêndulo?
Código da Disciplina: 1EB176 – FÍSICA I
118
T2
(s2)
FAAP – Faculdade Engenharia
Experiência : Mesa de forças
Objetivo:
Determinação da força equilibrante de um sistema de duas forças
concorrentes utilizando o Teorema de Lamy.
Introdução:
Se certo número de forças não-paralelas atuar num mesmo ponto de um
corpo, pode-se demonstrar a possibilidade de uma substituição das mesmas por
uma única força que produzirá o mesmo efeito no corpo; essa força é conhecida
como o resultante das forças aplicadas. O processo para a determinação dessa
resultante denomina-se composição de forças.
A força isolada, que manterá o sistema de forças concorrentes em equilíbrio,
é chamada equilibrante do sistema. É igual em módulo à resultante, mas de
sentido oposto.
Os processos para a determinação das componentes de forças, segundo
direções específicas, são denominadas decomposição de forças. Os processos
composição e decomposição podem ser executados mediante outros métodos
gráficos e analíticos.
Se F for a força considerada, o método analítico para a determinação de suas
componentes consistirá na aplicação das relações trigonométricas no triângulo.
formado por F, Fx e Fy na figura, as forças Fx e Fy são, respectivamente, as
componentes horizontal e vertical da força F.
Para calcular a resultante de duas forças em módulo, utilizamos a relação:
R = F12 + F22 + 2F1.F2 . cos β
β = β1 + β 2
Código da Disciplina: 1EB176 – FÍSICA I
119
FAAP – Faculdade Engenharia
β1
F1
R
β
β2
β1
F2
Para determinarmos a direção da resultante, usamos a lei dos senos:
F1
F2
R
=
=
sen β1 sen β 2 sen(180º −β )
Teorema de Lamy
Seja 3 forças coplanares concorrentes aplicadas sobre um ponto conforme
figura abaixo:
podemos
F1
dizer
F1
F3
α
180º -α
β
γ
β
α
F3
180º -β
F2
Aplicando-se a lei
dos senos:
F1
F2
R
=
=
sen β1 sen β 2 sen(180 º −β)
180º -γ
F2
γ
como sen (180º- θ ) = senθ
então :
F1
F
F3
= 2 =
sen γ sen β sen α
Material utilizado:
Mesa de forças cenco (pequena mesa circular dotada de roldanas as quais
podem se fixar em suas bordas em posições variáveis); porta-pesos; massas
aferidas; fios; escalas graduadas, transferidor.
Código da Disciplina: 1EB176 – FÍSICA I
120
FAAP – Faculdade Engenharia
Procedimento Experimental
1) Retirar o anel da mesa de forças e nivela-la. Essa operação é feita da
seguinte maneira:
a) Colocar o nível sobre a mesa de forças de modo que seu eixo longitudinal
fique paralelo a um dos pés do suporte da mesa e ajustar a “bolha“ com o
auxilio do parafuso (P1) desse pé;
b) Mudar a posição do nível sobre a mesa, de modo a fazer com que seu
eixo longitudinal fique paralelo a uma reta imaginária que passe pelos
outros dois parafusos (P2 e P3) dos outros dois pés. Girar então ambos os
parafusos simultaneamente, em sentidos contrários, até ajustar a posição
correta da bolha.
2) Fixe as polias nos ângulos α1 = 50.0º e α2 = 105º. Coloque o anel metálico no
pino existente no centro da mesa. Passe os barbantes sobre as polias e, em
cada extremidade livre, suspenda um suporte com peso próprio igual a 50,0gf.
Coloque massores nos suportes de modo a aplicar as forças F1 = 300,0gf e F2
= 200,0gf (Não esqueça de incluir o peso dos suportes).
3) Por tentativas, obtenha a intensidade E da força equilibrante e o ângulo α que
determina a sua direção. A posição ou equilíbrio é aquela em que o pino fica
exatamente no centro do anel e que as direções dos barbantes se cruzam no
pino (veja figura). Anote esses valores.
E (exp) =________________________
α(exp) = ________________________
4) Determine analiticamente o módulo E aplicando a lei dos cossenos.
Código da Disciplina: 1EB176 – FÍSICA I
121
FAAP – Faculdade Engenharia
5) Determine analiticamente a direção e o sentido de E, que é dado pelo ângulo
α aplicando o teorema de Lamy.
6) Ache o erro percentual de E(exp) relativamente a E(analítico).
7) Ache o erro percentual de α(exp.) relativamente a α(analítico).
8) No papel anexo, adequado para fazer um diagrama polar, represente através
de vetores as forças F1 e F2 com seus respectivos ângulos e aplicando a
regra do paralelogramo (método gráfico), determine a força resultante
graficamente.
9) Calcule o resultante do sistema de forças aplicando o método de
decomposição retangular. Ache a força equilibrante aplicando este processo.
10) Ache o erro percentual de E(exp) relativamente a E(analítico), obtido pela
decomposição retangular.
11) Ache o erro percentual de α(exp) relativamente a α(analítico), obtido pela
decomposição retangular.
12) Compare os valores obtidos para a resultante, para a força equilibrante obtida
experimentalmente, analiticamente e graficamente. Esses valores devem
coincidir.
Código da Disciplina: 1EB176 – FÍSICA I
122
FAAP – Faculdade Engenharia
Código da Disciplina: 1EB176 – FÍSICA I
123
FAAP – Faculdade Engenharia
Laboratório de Física
Estudo do momento polar de Forças
1ª Parte – Barra não Homogênea
1. Localize o baricentro G da barra
homogênea, suspendendo-a por um de
seus furos, até equilibrá-la na posição
horizontal.
2.
3. Utilizando-se os massores e os suportes,
aplique na barra as forças indicadas na
figura (não se esqueça de incluir os
pesos próprios dos suportes) e determine
a força F3 que equilibra a barra na
posição horizontal.
X1
•
X2
•
•
X3
•
•
F2
F1
F3
X1 = 16,0 cm F1 = 100,0 gf
X2 = 8,0 cm F2 = 80,0 gf
X3 = 20.0 cm F3 = ?
4. Use a condição de equilíbrio de rotação ∑ML = 0 e calcule Fa analiticamente
F3 = ...............................gf
(compare com o resultado obtido experimentalmente no item anterior)
F1 x1 + F2 x2 – F3 x3 = 0
F3 =……………………………..gf
2ª Parte –Barra não homogênea
1. Por meio de um gancho, suspenda o prato
no furo da barra localizado mais próximo
da extremidade (veja figura). Suspenda a
barra pelo furo situado à distância x = 4,0
cm do gancho. Coloque massores no prato
e determine a força F necessária para
manter a barra em repouso na posição
horizontal (porque às vezes esta operação
se torna difícil de ser realizada).
x = 4,00 cm
•
•
Variar este
furo
Furo Fixo
F
Não se esqueça de incluir o peso próprio do prato na determinação de F.
MANTENHA O PRATO SUSPENSO SEMPRE NO MESMO FURO, SEMPRE NO
PRIMEIRO DA ESQUERDA, varie a distância x, de acordo com a tabela, e anote os
novos valores da força F.
F (gf)
x (cm)
-1
1/x (cm )
4,0
6,0
8,0
10,0
12,0
14,0
0,25
0,17
0,13
0,10
0,083
0,071
Código da Disciplina: 1EB176 – FÍSICA I
124
FAAP – Faculdade Engenharia
2. Nas condições realizadas, demonstra-se que, F = (1/x) – P, sendo c constante e
P o peso da barra não-homogênea.
3. Construa no papel milimetrado o gráfico cartesiano anamorfoseado F versus
(1/x), adotando 15,0 cm para comprimento de cada eixo coordenado.
eixo das abscissas (1/x)
compriment o eixo
λx =
(1/x) max - (1/x)o
(1/x)o = 0,0 cm-1
(1/x)Max = 0,25 cm-1
λx =
1,5.0
= 60,0 cm/cm -1
0,25 - 0
dx = λx.(1/x)
d1x = …………………………cm
d2x = …………………………cm
d3x = …………………………cm
d4x = …………………………cm
d5x = …………………………cm
d6x = …………………………cm
1. No gráfico, prolongue a “reta média”
obtida, mediante uma linha tracejada,
até interceptar o eixo das ordenadas.
Meça a distância d e obtenha
graficamente o peso P da barra nãohomogênea.
d = .............................cm
d
P=
= _____________
λy
P (exp) = .........................gf
eixo das ordenadas (F)
compriment o eixo
λy =
Fmax - Fo
Fo = 0,0 gf
Fmax =
gf
15,0
= LL cm / gf
-0
dy = λy . F
λy =
d1y……………………………..cm
d2y……………………………..cm
d3y……………………………..cm
d4y……………………………..cm
d5y……………………………..cm
d6y……………………………..cm
F
•
•
•
•
•
•
d
0
1/x
•
2. Indique o peso da barra determinado mediante uma balança (o valor está
gravado na própria barra):
P(verd) = ..............................................gf
3. Admitindo como verdadeiro este último valor, calcule o erro percentual cometido
na experiência.
P(verd) - P(exp)
erro% =
⋅ 100%
P(verd)
erro% =
100%
erro% = ......................................
Código da Disciplina: 1EB176 – FÍSICA I
125
FAAP – Faculdade Engenharia
Experiência: Molas helicoidais
Objetivo
Estudo da elasticidade de molas helicoidais em relação às suas dimensões e
ao material de que são feitas.
Material
Molas helicoidais; porta-pesos; pesos aferidos; escala métrica; grampo de
mesa; hastes; presilha de 90º.
Introdução
A elasticidade é a propriedade que determina como um corpo retorna ao seu
tamanho e à sua forma originais após ter sido deformado por forças. Se o
restabelecimento do tamanho e da forma primitivos for completo, o corpo será
denominado perfeitamente elástico.
Existem vários módulos de elasticidade que descrevem as propriedades
elásticas de um dado material.
Chama-se por definição módulo de elasticidade a relação entre uma força
aplicada e a deformação correspondente. O módulo de elasticidade é uma constante
dos materiais dentro do limite de elasticidade.
Observações experimentais indicam que corpos, como, por exemplo, uma
mola helicoidal, ou uma tira de borracha, se alongam sempre que uma força for
aplicada. Se a distensão não é muito grande, esses corpos tendem a retornar aos
seus comprimentos originais ao ser removida a força responsável pela distensão.
As propriedades elásticas das molas helicoidais são freqüentemente citadas
em Mecânica. A distensão da mola é na realidade uma combinação de tração, flexão
e torção do arame de que ela é construída, sendo preponderante o efeito da torção,
podendo portanto os outros ser desprezados.
A torção de um material sob a ação de uma força é fisicamente descrita pelo
módulo de rigidez.
Assim, sabemos que, se uma força for aplicada a uma mola helicoidal, ela
sofrerá uma deformação tal que força a deformação são proporcionais entre si,
obedecendo à lei de Hooke:
F=k.x
Código da Disciplina: 1EB176 – FÍSICA I
126
(1)
FAAP – Faculdade Engenharia
A lei de Hooke para cada mola é válida num certo intervalo de valores das
forças aplicadas. Aplicando-se gradativamente forças ao terminal livre de uma mola
suspensa, a partir do valor zero, estando suas aspiras encostadas uma às outras e
como a deformação se realiza através de uma torção, deve ocorrer uma natural
rotação do fio de que é feita a mola. Isso implica a existência de atrito entre as
aspirais, provocando assim uma dificuldade de movimento, “mascarando” assim a lei
de Hooke. Esse efeito desaparece logo que a força aplicada for suficiente para as
espiras se separarem adequadamente. Este valor da força aplicada constituí o limite
mínimo da validade da lei de Hooke.
A partir da situação de separação das espiras da mola (limite mínimo) até a
correspondente ao limite máximo é valida a lei de Hooke. O limite máximo é
caracterizado pela mínima força que, aplicada à mola, provoca uma deformação
permanente (de efeito irreversível), ou seja, deixa uma deformação residual, mesmo
após ter sido retirada.
O fator de proporcionalidade entre a força aplicada e a deformação
correspondente, na fase elástica, é chamado constante elástica da mola:
k=
F
x
(2)
Figura 01
A constante elástica de uma mola depende das características de construção
da mesma, ou seja:
•
número de espiras
•
diâmetro interno da espira
•
diâmetro do fio
•
natureza do metal
Código da Disciplina: 1EB176 – FÍSICA I
127
FAAP – Faculdade Engenharia
Notar também que a constante elástica de uma mola é inversamente
proporcional à elasticidade, ou seja, a mola mais elástica possui constante elástica
menor que a mola menos elástica. Isso é ilustrado pelo gráfico abaixo.
Temos:
F
F
k1 = 1 e k 2 = 2 .
x1
x2
Se x 2 > x 1, logo k 1 > k 2 .
Observamos através do gráfico que a mola a é menos elástica que a mola b,
pois, para uma mesma força F1, sofre uma deformação menor (x1) e, assim, a mola
cuja constante elástica é maior, é a menos elástica.
A constante elástica (k) e o módulo de rigidez (ρ) podem ser relacionados
através da expressão:
ρ ⋅ d4
k=
(3)
8 ⋅ n ⋅ D3
onde:
ρ = módulo de rigidez do material
d = diâmetro do arame
n = número de espiras da mola
D = diâmetro interno da espira.
Pela análise da expressão (3), podemos concluir que a constante elástica k
aumenta com o módulo de rigidez ρ e com o diâmetro do arame d; diminui com o
número de espiras n e com o diâmetro interno D.
Procedimento
1. Medir nas três molas fornecidas D, d e n de cada uma e anotar na folha de
dados.
2. Suspender a mola 1, por um de seus extremos, e colocar na extremidade livre
o porta-pesos.
Figura 02
Código da Disciplina: 1EB176 – FÍSICA I
128
FAAP – Faculdade Engenharia
Figura 03
3. Marcar a posição da face inferior do porta-pesos na escala, por meio do
cursor, considerando-a como origem das deformações.
4. Colocar no porta-pesos um peso de 50 gf e ler a deformação em milímetro.
5. Repetir o item 4 até atingir 600 gf no porta-pesos.
6. Repetir os itens de 1 a 5 com as molas 2 e 3.
7. Construir o gráfico F versus x para cada mola, num mesmo referencial,
observando que, quando começamos a tracionar a mola, como foi citado na
introdução, a lei de Hooke não tem validade. O gráfico terá a configuração da
Fig. 03, ou seja, a reta será traçada desprezando-se os primeiros pontos.
8. Obter, a partir dos gráficos, as constantes elásticas das molas.
9. Colocar em ordem crescente de valores as constantes elásticas obtidas.
10. Calcular os módulos de rigidez dos materiais das três molas.
11. Calcular o trabalho realizado por cada mola helicoidal devido à ação de uma
força de 400 gf, sabendo-se que uma mola, ao se deformar sob a ação de
uma força, realiza um trabalho dado pela expressão:
x1
x1
x1
x0
x0
x0
W = ∫ Fdx = ∫ K ⋅ x ⋅ dx = k ⋅ x 2
(
=
)
= (1 2)k ⋅ x12 − (1 2)k ⋅ x 02 = (1 2)k ⋅ x12 − x 02 .
Se x0 = 0 e x1 = x. Assim,
W = (1/2)k.x2.
Código da Disciplina: 1EB176 – FÍSICA I
129
(4)
FAAP – Faculdade Engenharia
Folha de dados
EXPERIÊNCIA: Molas Helicoidais
Aluno:.................................................................................Número:...........................
Turma:.......................Grupo:......................................Data:........................................
Professor:....................................................................................................................
1.
Mola 1
n1 =
d1 =
D1 =
F(gf)
50
100
150
200
250
300
350
400
450
500
550
600
Mola 2
x(cm)
n2 =
d2 =
D2 =
F(gf)
50
100
150
200
250
300
350
400
450
500
550
600
Mola 3
x(cm)
n3 =
d3 =
D3 =
F(gf)
50
100
150
200
250
300
350
400
450
500
550
600
x(cm)
Observação: x1, x2,…são as diferenças entre as leituras com o porta-pesos
carregado e o porta-pesos vazio.
2. Construir os gráficos F versus x.
3. Do gráfico, obter os valores de:
k1 =
gf/cm
k2 =
gf/cm
k3 =
gf/cm
4. Colocar os valores obtidos de k em ordem crescente.
5. Calcular os valores dos módulos de rigidez das molas.
ρ1 =
ρ2 =
ρ3 =
6. As molas são feitas do mesmo material? Justificar.
7. Calcular os trabalhos realizados pelas molas helicoidais devido à ação de uma
força de 400 gf.
W1 =
gf.cm
W2 =
gf.cm
W3 =
gf.cm
8. Fazer um estudo comparative dos valores obtidos de k em relação aos diâmetros
dos fios, aos diâmetros das espiras e ao tipo do aço das molas.
Código da Disciplina: 1EB176 – FÍSICA I
130
FAAP – Faculdade Engenharia
Experiência: Comportamento semi-elástico de uma tira de
borracha
Objetivo
a) Estudo do comportamento de uma tira de borracha sob a ação de cargas
crescentes e decrescentes.
b) Determinação da energia mecânica dissipada em uma deformação
permanente da tira
Material
Tira de borracha; escala graduada com cursores (ou catetômetro); portapesos; grampo de mesa; haste.
Introdução
Aplicando-se trações crescentes a um fio metálico, por exemplo, este sofrerá
inicialmente uma deformação elástica, que obedece à lei de Hooke. Ultrapassado o
limite de proporcionalidade, e aumentando-se o valor da força de tração, o material
passará a apresentar elongações não mais proporcionais às forças aplicadas. O
gráfico da força de tração versus deformação tem o aspecto da Fig. 01.
Aumentando-se a força de tração, a partir de zero, a cada valor da força
haverá uma deformação correspondente. Se porém, ao atingirmos o ponto B e
iniciarmos a diminuição da força de tração, o caminho de volta, no gráfico, não mais
será o mesmo e, quando o valor da força for igual a zero, haverá uma deformação
residual ∆r. A esse fenômeno dá-se a denominação histerese mecânica.
elongação
B
C
AC = ∆T = elongação
residual
Força de tração
A
Figura 01
Se, a partir do ponto C, aumentarmos novamente a força de tração, o fato se
repetirá e assim por diante. Isso fará com que a energia perdida em cada vez, sob a
forma de calor para o ambiente, deixe o corpo extremamente sem resistência,
rompendo-se com facilidade. Fato semelhante ocorre quando queremos quebrar um
arame e vamos entortando-o para um lado e para outro até a ruptura.
Sob o ponto de vista físico, a histerese mecânica representa um trabalho
perdido durante o processo, podendo ser calculado através da medição da área
ABC.
Nesta experiência será analisada a histerese mecânica, usando como corpo
que sofre a deformação uma tira de borracha, a qual é presa por uma de suas
extremidades e tem suspensa, na outra, um porta-pesos.
Código da Disciplina: 1EB176 – FÍSICA I
131
FAAP – Faculdade Engenharia
Figura 02
Procedimento
1. Anotar o valor l0 que se lê na escala, indicado pelo extremo inferior da tira de
borracha, quando ela for tracionada apenas pelo porta-pesos.
2. Colocar um massor de 50 g sobre o prato e ler a nova posição l1, por
diferença com l0.
3. Repetir o procedimento do item anterior até completar dez massores sobre o
porta-pesos, anotando os valores correspondentes na 1ª coluna da tabela.
4. Retirar agora os massores, um por vez, e ler as posições correspondentes na
escala, anotando os valores correspondentes na coluna 2 da tabela.
5. Traçar um gráfico deformações versus cargas na folha de papel milimetrado.
6. A partir do gráfico, calcular a área limitada pelo eixo das ordenadas e a curva
externa (cargas crescentes).
7. Para podermos calcular a área citada no item 6, dividi-la por meio de um certo
número de retas paralelas ao eixo abscissas de 1 em 1 centímetro. Assim,
S1 = (OA x Aa)/2 (cm) (triângulo)
S 2 = ( Aa + Bb) ⋅ AB/2
(trapézio)
S 3 = (Bb + Cc) ⋅ BC/2 (trapézio)
Portanto:
S = S 1 + S 2 + …+ S n
Código da Disciplina: 1EB176 – FÍSICA I
132
FAAP – Faculdade Engenharia
8. Calcular agora a área limitada pelo eixo das abscissas e a curva interna
(cargas decrescentes):
S'1 = (O' A x Aa' )/2 (cm) (triângulo)
S' 2 = ( Aa' + Bb' ) ⋅ AB/2
(trapézio)
S' 3 = (Bb' + Cc' ) ⋅ BC/2 (trapézio)
Portanto:
S’ = S’1 + S’2 + S’3 +…+ S’n
9. As áreas S e S’ calculadas são, respectivamente, proporcionais ao trabalho
fornecido à tira quando submetida a cargas e ao trabalho que a tira realiza
quando submetida a cargas decrescentes.
10. A constante de proporcionalidade entre as áreas calculadas e o valor
numérico do trabalho efetivamente realizado (área entre as curvas) será λx λy.
Portanto:
S − S'
W=
gf ⋅ cm,
λ xλ y
onde λx e λy.são os módulos das escalas adotados para os eixos das
abscissas e das ordenadas, respectivamente.
11. Numa outra folha de papel milimetrado, traçar novamente o gráfico,
recortando agora a área limitada pelas duas curvas (∆S):
Oabcd
e
O’a’b’c’d’
Recortar da mesma folha um quadrado de 4 cm2, cuja área denominaremos
S 0.
12. Numa balança de precisão, determinar as massas de S1 e S0:
m1 = massa de S1
m0 = massa de S0
Se admitirmos que a distribuição superficial de massa da folha de papel
considerada é constante, poderemos escrever:
m1/S1 = m0/S0
ou
S1 = (m1/m0)⋅S0
Como no caso anterior, obter-se-á:
S1
W' =
gf ⋅ cm
λxλy
13. Comparar W e W’. Qual dos dois métodos utilizados é o melhor? Justificar.
Código da Disciplina: 1EB176 – FÍSICA I
133
FAAP – Faculdade Engenharia
Folha de dados
EXPERIÊNCIA: Comportamento Semi-Elástico de uma Tira de Borracha
Aluno:.................................................................................Número:...........................
Turma:.......................Grupo:......................................Data:........................................
Professor:....................................................................................................................
1. l0.=
cm
2. Tabela (l e l’ deverão ser obtidos por diferença relativamente a l0.)
F(gf)
50
100
150
200
250
300
350
400
450
500
l(cm)
3. Construir o gráfico deformações versus cargas.
4. Cálculo dos módulos das escalas:
λx =
cm/gf
λy =
cm/cm
5. Cálculo das áreas
cm; S’1 =
S1 =
S2 =
cm; S’2 =
S3 =
cm; S’3 =
S4 =
cm; S’4 =
cm; S’5 =
S5 =
S6 =
cm; S’6 =
S7 =
cm; S’7 =
S8 =
cm; S’8 =
S9 =
cm; S’9 =
S10 =
cm; S’10 =
S = S 1 + S 2 + …+ S n
S=
cm2
S’ = S’1 + S’2 + …+ S’n
S’ =
cm2
∆S = S – S’ =
S − S'
=
6. W =
λ xλ y
Código da Disciplina: 1EB176 – FÍSICA I
134
l' (cm)
cm
cm
cm
cm
cm
cm
cm
cm
cm
cm
FAAP – Faculdade Engenharia
W=
gf.cm
7. Obter o valor da massa da tira de papel correspondente a S – S’ = ∆S
m1 =
g
8. Idem para o quadrado de 4 cm2:
m0 =
g
9. Calcular o valor de ∆S = S – S’ através da relação:
∆S = (m1/m0) S0
∆S =
cm2
10. Calcular o valor do trabalho W’:
∆S
W’ =
λxλy
W’ =
gf.cm
11. Comparar os valores obtidos para W e W’. Qual deles estará menos gravado de
erros? Justificar.
Código da Disciplina: 1EB176 – FÍSICA I
135
FAAP – Faculdade Engenharia
Experiência: Aceleração de um projétil
Objetivo
Estudar a natureza de um movimento acelerado através da observação da
trajetória de um projétil sobre um plano inclinado.
Material
Aparelho de Packard: esfera de aço; papel milimetrado; papel carbono.
Descrição do Aparelho
Se não for possível obter um aparelho de Packard, pode-se perfeitamente
substituí-lo por uma tábua de aproximadamente 800 cm2, com inclinação de 10º a 30º
em relação à horizontal. A tábua deverá ser coberta por uma lâmina de vidro ou outro
material duro. O dispositivo com o qual a esfera é projetada é feito de metal ou
madeira e consta de uma canaleta (p) situada na extremidade superior esquerda do
plano principal (P), de tal modo que a esfera (diâmetro aproximadamente igual a 2,5
cm) seja projetada numa direção horizontal.
O plano principal é dotado de duas presilhas que se destinam a fixar uma folha
de papel carbono disposta sobre uma folha de papel milimetrado, cujas linhas
horizontais devem ser paralelas aos bordos do plano.
Figura 1
Introdução
Quando a esfera se projeta sobre o plano principal através da canaleta, rola
plano abaixo, deixando gravada sobre o papel milimetrado a trajetória de seu
movimento que é do tipo da Fig. 02.
Código da Disciplina: 1EB176 – FÍSICA I
136
FAAP – Faculdade Engenharia
Figura 2
Desprezando-se o atrito da esfera contra o papel, a trajetória do movimento
descrito pela esfera é um arco da parábola, sendo que:
a) Na direção 0x não atuam forças; a projeção do movimento será um movimento
retilíneo e uniforme, com origem no ponto 0, onde a esfera tocou a folha de papel
milimetrado. Logo, a equação do movimento será:
x =vox .t
MRV
(1)
b) A projeção segundo a direção 0y, será a de um movimento retilíneo uniformemente
acelerado, com aceleração a, pois as forças que agem sobre a esfera são:
1. a reação normal do plano N, que equilibra a componente normal do peso da
esfera no plano inclinado.
N = m . . cos α.
2. a componente tangencial do peso da esfera T, paralela ao plano. T = m.g . sen α .
T m.g . sen α
A força T produz a aceleração. a =
=
= g . sen α = constante .
m
m
O valor de g (aceleração da gravidade) é conhecido e α pode ser facilmente
determinado.
dv y
Sendo
dt
=a
v x = ∫ a.dt = ∫ g . sen α .dt = g.sen α .t + C1
N
Pt
α
Figura 3
Pn
P
α
Código da Disciplina: 1EB176 – FÍSICA I
137
FAAP – Faculdade Engenharia
Para t = 0,
vy = voy = C1
Como a direção de vo é horizontal, resulta que voy = 0 e, portanto, C1 = 0,
Vy = g . sen α . 1
Mas, r y =
MRJA
(2)
dy
t2
, logo y = ∫ v y .dt = ∫ g . sen α .tdt = g . sen α . + C 2
dt
2
Para t = 0,
y = y o = C2
Como a esfera parte da origen dos eixos coordenadas, yo = 0 e, portanto, C2 =
0. Assim,
y=
1
g . sen α .t 2
2
(3)
Deduziremos agora a equação da trajetória:
x = v o .t ,
t=
x
,
vo
g . sen α .x 2
1
y = g . sen α .t 2 =
2 r02
2
Designando-se
k=
g . sen α
2v2x
(4)
Podemos escrever a equação da trajetória, y = k . k2, (5) que é a equação de
uma parábola.
Procedimento
1. Nivelar o plano inclinado.
2. Fixar uma folha de papel milimetrado no plano de Packard e verificar por tentativas
os seguintes itens:
a) se a esfera toca o papel milimetrado numa posição conveniente, ou seja, se
a origem da trajetória está dentro do papel milimetrado. Se isso não
acontecer, ajustar o papel milimetrado para que aconteça;
b) se a trajetória ocupa a máxima distância segundo a direção horizontal. Se
isso não ocorrer, soltar a esfera de outra posição sobre a canaleta (p).
Determinada a posição conveniente sobre a canaleta, fixá-la com o
parafuso que o aparelho dispõe especificamente para essa finalidade.
3. Medir o ângulo de inclinação do plano (α) através das medições de l e h,
conforme a Fig. 4.
Código da Disciplina: 1EB176 – FÍSICA I
138
FAAP – Faculdade Engenharia
Figura 4
Observar que l é o comprimento do plano inclinado, considerado sobre a superfície
em que a esfera rola até seu prolongamento.
4. Colocar o papel carbono sobre o papel milimetrado e abandonar a esfera da
posição que foi determinada no item 2, obtendo a trajetória do movimento descrito
pela esfera no papel milimetrado.
5. Locar a origem dos eixos 0x e 0y no canto esquerdo do papel, rigorosamente no
ponto em que a esfera tocou o papel milimetrado. A partir desse ponto, traçar os
eixos do referencial adotado.
6. Sobre o eixo 0x, e a partir da origem, marcar pontos de 1 em 1cm. Desses pontos,
baixar verticais até interceptar a linha contínua representativa da trajetória. A partir
dos pontos de interseção, traçar as horizontais até encontrar o eixo das
ordenadas, obtendo-se assim os valores de y correspondentes.
7. Preencher a Tab. 1 nos itens x, y e x2.
8. Na folha de papel milimetrado, construir o gráfico anamorfoseado y versus x 2 .
Obter-se-á assim uma reta, cuja inclinação nos dará o valor k, conforme as Eqs. (4
e 5).
9. A partir do valor obtido de k, através da Eq. (4), determinar-se-á o valor de vo.
10. Assim, poder-se-ão avaliar na trajetória original os tempos em segundo, que
correspondem às distâncias (de 1 em 1 cm) no eixo das abscissas.
11. Num movimento retilíneo uniformemente acelerado, sabe-se que a velocidade
média entre dois pontos é igual à velocidade instantânea no ponto médio do
intervalo considerado, ou seja,
vy =
Assim,
y 2 − y1 v y1 + v y 2
=
t 2 − t1
2
y
= (1 / 2 )v y ,
1
sendo
t1 =0, y1 = 0 e
vyi = 0
ou seja
vy = 2(y/t)
(6)
Através da Eq.(6), complementar a tabela lembrando-se de que todos os valores
de y e t devem ser considerados em relação à origem.
12. Construir o gráfico vy versus t, o qual, de conformidade com a Eq. (2), será reta.
13. Determinar através do gráfico a inclinação da reta obtida, a qual será o valor da
aceleração do movimento uniformemente acelerado ay.
Código da Disciplina: 1EB176 – FÍSICA I
139
FAAP – Faculdade Engenharia
FOLHA DE DADOS
Experiência: Aceleração de um Projétil
Aluno:______________________________________Número:_____________
Turma:____________Grupo:_____________Data:_______________________
Professor:________________________________
1. h =
α=
2.
x (cm)
cm;
;
l=
cm;
sen α =
y (cm)
tg α =
2
2
x (cm )
t = x/vo(s)
vz = 2 (y/t)cm/s)
2
Construir o gráfico y versus x .
A partir do gráfico, obter o valor de k = tg θ
k=
vox =
cm/s
Preencher na tabela a coluna correspondente ao tempo.
Locar no gráfico o valor de t em segundo correspondente a cada centímetro.
Código da Disciplina: 1EB176 – FÍSICA I
140
FAAP – Faculdade Engenharia
Experiência: Movimento de Projétil e Pêndulo Balístico
Objetivo
Determinação da velocidade inicial do movimento de um projétil.
Introdução Teórica:
y
vo
x
Seja o movimento de um projétil, conforme mostra a figura acima teremos as
seguintes equações:
a) A distância vertical percorrida no eixo y tem a equação
y=
1 2
gt
2
b) Simultaneamente o deslocamento horizontal tem a equação
x = v o .t
De 1 e 2, temos que v o = x
g
2y
Onde g = 9,78 m/s2, que é a equação para obter a velocidade inicial, para o
projétil que pretendemos obter.
Material Utilizado
•
Lançador de projétil
•
Esfera de aço
•
Trena
Procedimento Experimental
a) O arranjo experimental desta experiência é o seguinte:
Código da Disciplina: 1EB176 – FÍSICA I
141
FAAP – Faculdade Engenharia
b) Faça 10 (dez) lançamentos horizontais do projétil de acordo com o arranjo
experimental acima, de modo a atingir a folha de papel que se encontra no solo.
c) Medir em cada caso a altura da queda (h) e o respectivo alcance horizontal R, e
anote os valores na tabela.
d) Calcule as velocidades de lançamento, determine o seu valor médio e o seu
desvio médio.
TABELA
Lançamento
x
y
V0
(m)
(m)
(m/s)
V0
(m/s)
(V0 − V 0 ) (V 0 + σV0 )
(m/s)
(m/s)
1
2
3
4
5
6
7
8
9
10
Pêndulo Balístico
O pêndulo balístico consiste em esferas vazadas, uma pistola de mola e um sistema
para suspender as esferas por meio de uma haste.
Código da Disciplina: 1EB176 – FÍSICA I
142
FAAP – Faculdade Engenharia
Conservação do momento linear
mv = (m + M)v1
(m + M )
v=
2.g .Y
m
substituição (2) em (1)
(1)
(2)
onde, m = 0,0673 kg
M = 0,271 kg
Y1 (m)
Y2 (m)
h (m)
v (m/s)
v( m / s )
1
2
3
4
5
Questão: O que pode-se concluir desta experiência?
Código da Disciplina: 1EB176 – FÍSICA I
143
σv( m / s) ( v + σv )( m / s )
FAAP – Faculdade Engenharia
Experiência: Força Centrípeta
Objetivo
Determinação da força centrípeta exercida sobre um corpo em movimento de
rotação com velocidade escalar constante.
Quando um corpo executa movimento circular uniforme, a força resultante
exercida no corpo está dirigida para o centro da trajetória. Esta força é denominada
força centrípeta e tem intensidade:
m ⋅v 2
Fc = m ⋅ ω 2 ⋅ r =
R
onde: m = massa do corpo em movimento de rotação
v = velocidade escalar do corpo
ω = velocidade angular do corpo
R = distância entre o centro da trajetória e o baricentro do corpo
Por outro lado, sendo o movimento circular uniforme, tem-se:
2πl
v=
= 2πRf
T
onde: T = período do movimento (duração de uma volta completa)
F = freqüência do movimento
Portanto:
F = 4 ⋅π 2 ⋅ m ⋅ f 2 ⋅ R
O aparelho utilizado consiste em um balancim (massa cilíndrica B que pode
deslocar livremente sobre duas hastes). Uma mola S de tensão ajustável exerce força
centrípeta sobre o balancim quando o conjunto móvel estiver em movimento de
rotação. Este conjunto pode ser acoplado a um motor.
Por meio de um parafuso que aciona um dispositivo específico, situado na
parte inferior do acoplamento, pode-se controlar a velocidade do rotor (conjunto
móvel) até que seja atingido um valor tal que o balancim (como massa m) se afaste
da posição normal até a posição terminal. Nesta posição, o balancim acionará a haste
p (indicador), que se elevará e deixará a extremidade alinhada em relação a um
cabeçote de referência. Através do conta-giros, poder-se-á determinar a freqüência
do movimento após se ter determinado o número de voltas realizadas num certo
tempo. O rotor consiste essencialmente em um grande disco principal sobre a qual
fira um disco de fricção, acoplado a um eixo. A velocidade do disco pode ser
controlada através de um parafuso.
Figura 1
Código da Disciplina: 1EB176 – FÍSICA I
144
FAAP – Faculdade Engenharia
Figura 2
A) Método Dinâmico
1. Faça o aparelho funcionar e ajuste a velocidade de rotação de tal forma que a
haste p seja tocada pelo balancim o suficiente para levantá-la.
2. Use o conta-giros e o cronômetro e determine o número n de rotações
efetuadas durante o tempo t = 1,0 minuto. Repita esta operação 05 (cinco)
vezes e anote os valores na tabela. Ao efetuar estas medidas, a velocidade do
aparelho deverá ser estritamente necessária para elevar a haste p.
r
1
2
3
4
5
média
Tempo (min.)
1,0
1,0
1,0
1,0
1,0
******************
n (rpm)
3. Calcule a freqüência f de rotação, em hertz (Hz)
n
n
f = =
=
= .........................................................Hz
t 60 60
4. Meça o raio de rotação r. A distância a ser media é a que separa o ponto por
onde passa o eixo de rotação e o centro do corpo girante.
r = 5 ,50 cm = 0,055 0 m
5. Calcule a intensidade da força centrípeta exercida pela mola sobre o corpo,
sabendo-se que a massa do balancim é m = 150,7 g = 0,150 7 kg.
Fd = 4 ⋅ π 2 ⋅ m ⋅ f 2 ⋅ R → Fd = ..............................................N
B) Método Estático
1. Retire a parte girante do aparelho e pendure-a na haste vertical. No gancho
situado na parte inferior suspenda o suporte e adicione massores, até
conseguir com que o balancim toque o ponteiro p, deslocando-o da mesma
forma com que o fez durante a rotação.
massas adicionadas =.......................................g
massa do balancim =
150,7
g
massa do suporte =
15,0
g
Massa total suspensa no gancho: M = ....................g = ...........................kg
2. Calcule a intensidade da força centrípeta, sendo g = 9,78 m/s2:
Código da Disciplina: 1EB176 – FÍSICA I
145
FAAP – Faculdade Engenharia
Fo = M. G
Fo = …………………………N
3. Calcule o erro percentual em Fd relativamente a F.
Fo − Fd
erro % =
⋅100% erro % = ..................................
Fo
Código da Disciplina: 1EB176 – FÍSICA I
146
FAAP – Faculdade Engenharia
Experiência: Queda Livre
Objetivo
Determinação da aceleração da gravidade local, através do movimento de um
corpo em queda livre.
Introdução Teórica
Sabemos que todo o corpo, quando abandonado próximo à superfície da Terra,
cai em direção à mesma. Esse movimento realizado pelo corpo na ausência do ar
atmosférico (vácuo), recebe o nome de queda livre.
Esse movimento foi estudado por Galileu Galilei, que em suas observações
experimentais, estabeleceu as três leis que se seguem:
a) Todo corpo próximo à superfície da Terra e na ausência de forças
resistentes, caem com a mesma aceleração independente de sua massa é
volume.
b) A velocidade do corpo cai, próxima à superfície da Terra é proporcional ao
tempo de queda.
c) Os espaços percorridos por um corpo de queda livre são proporcionais ao
quadrado dos tempos gastos em percorrê-los.
Depois Newton percebeu que os corpos caem em direção à Terra devido à
ação da força peso (P = mg).
Portanto, uma força atua nos corpos e de acordo com o princípio fundamental
da dinâmica, os movimentos realizados pelos corpos são acelerados. Como a força
peso é constante, os movimentos realizados são uniformemente acelerados.
A equação que rege esse movimento é:
1
h = ho + Vo t + g .t 2 , como ho = 0 e Vo = 0 ,
2
1
então h = gt 2
2
Procedimento Experimental
a) Meça com a trena metálica a altura h da esfera em relação à placa receptora.
Como se trata de uma única medição, adote para incerteza a metade da menor
divisão da escala, ou seja, ∆h = 0 ,05 cm = 0 ,0005 m .
h=(
±
)
b) Ligue o aparelho e coloque a esfera de aço no eletro-imã de modo a ficar presa.
Zere o cronômetro digital. Pressione com firmeza a chave tipo Morse, mantendo-a
pressionada até a esfera cair e atingir a placa receptora; esta operação fará com
que o cronômetro pare. Leia o tempo gasto na queda da esfera e anote na tabela.
Zere o cronômetro e repita as operações 20 vezes.
c) Complete a tabela achando o valor médio do tempo e seu respectivo desvio
médio.
d) Pela equação (a) calcule o valor médio da aceleração da gravidade local e seu
respectivo desvio médio.
e) Apresente a aceleração da gravidade adequadamente:
Código da Disciplina: 1EB176 – FÍSICA I
147
FAAP – Faculdade Engenharia
g = (g ± ∆g) m/s2
f) Calcule o erro
glocal = 9,78 m/s2
n
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
percentual
obtido
ti(s)
t(s)
na
experiência,
(ti-t)s
sabendo
que
(t ± ∆t)(s)
Valor mais provável do tempo: t =..................................s
Desvio médio no cálculo do tempo: ∆t = ...........................s
Tempo de queda: t = (..........................± ..........................)s
Valor mais provável da aceleração local da gravidade;
2 ⋅h
g= 2
g = .......................................m/s2
t
Desvio médio no cálculo de g:
∆g ∆h
∆t
=
+2⋅
∆g = ………………………….m/s2
g
h
t
Aceleração da gravidade escrita adequadamente:
g = (.............................±.........................)m/s2
Sendo em São Paulo g = 9,78 m/s2, calcule o erro percentual obtido na
determinação experimental da aceleração da gravidade:
erro% = (valor tabelado – valor experimental)/valor tabelado.100%
erro% = (............................................................).100%
erro% = .....................................
Código da Disciplina: 1EB176 – FÍSICA I
148
FAAP – Faculdade Engenharia
Laboratório de Física I
Uso do Interactive Physics
Objetivo
Montar algumas simulações mais complexas, bem como aprender a realizar
medidas de
Introdução
O Interactive Physics, além de criar uma animação do sistema físico que está
sendo simulado, permite também a realização de medidas das mais variadas
grandezas físicas, como velocidade, aceleração, força, e etc. Todas as medidas são
realizadas em relação a um sistema de referência interno fixo. A origem do sistema
de coordenadas pode ser observado através do menu selecionarmos a opção para a
apresentação das réguas (horizontal e vertical). Para tanto, selecione no menu a
seguinte opção: View Workspace Rules.
Código da Disciplina: 1EB176 – FÍSICA I
149
FAAP – Faculdade Engenharia
A posição do mouse em relação ao sistema de coordenadas definido pelo
computador, também pode ser observada. Para tanto, selecione a opção: View
Workspace coordnates.
Vamos agora montar o sistema físico mostrado abaixo. Desejamos posicionar
o centro do retângulo na posição (0;0), e o centro do disco na posição (0;2). Para
conseguirmos um posicionamento preciso dos objetos, após desenhá-los, podemos
controlar a posição do centro de gravidade clicando-se duas vezes sobre o objeto
para trazer a tela de propriedades do objeto. Para o cado do retângulo, estabeleça os
valores x = 0 e y = 0. Para o disco, faca x = 0 e y = 1. Ancore a seguir o retângulo e
execute a simulação.
Vamos agora medir a posição do disco. Clique sobre o botão de reset e a
seguir sobre o disco. Selecione então do menu “Measure”, selecione “Position” e a
seguir “Y-graph”. Se executarmos novamente a simulação veremos agora um gráfico
da posição do centro do disco. Para alterar o tipo de medida, clique sobre a seta
conforme mostrado na figura abaixo.
Meça agora, a velocidade do disco em função do tempo e sua aceleração.
Monte agora os seguintes sistemas, realizando as medidas indicas em cada figura.
Código da Disciplina: 1EB176 – FÍSICA I
150
FAAP – Faculdade Engenharia
Código da Disciplina: 1EB176 – FÍSICA I
151
FAAP – Faculdade Engenharia
Código da Disciplina: 1EB176 – FÍSICA I
152
FAAP – Faculdade Engenharia
Arquivo: circular.ip
Nome: Simulação de movimento circular
Conceitos explorados: Velocidade tangencial, força centrípeta e aceleração
centrípeta
Resumo: Neste sistema é simulado o comportamento de um corpo preso a uma
corda, que pode rodadr no plano horizontal ou no plano vertical. É possível controlar a
velocidade inicial do corpo para verificar o comportamento de parâmetros como a
tração da corda. A corda pode ser cortada em qualquer instante, e assim ser
observado o comportamento da trejetória descrita pelo corpo.
Código da Disciplina: 1EB176 – FÍSICA I
153
FAAP – Faculdade Engenharia
Arquivo: cinem2.ip
Nome: Simulação de cinemática escalar II
Conceitos explorados: Velocidade média e velocidade instantânea
Resumo: Através desta simulação, é possível acompanhar o movimento de dois
corpos que partem da mesma posição (x = 0). Um deles se move com uma
velocidade constante (vermelho) de 2 m/s, e o outro (verde) possui uma velocidade
que se altera com o tempo, acelerando em alguns trechos, e desacelerando em
outros. No instante t = 3.76 s, os corpos ocupam novamente a mesma posição
(x = 7.52 m), embora o comportamento da velocidade tenha sido bastante distinto.
Assim, é possível discutir o conceito de velociade média para o corpo verde no
intervalo 0 – 3.76 s, comparando com o movimento executado pelo corpo vermelho
no mesmo intervalo.
Código da Disciplina: 1EB176 – FÍSICA I
154
FAAP – Faculdade Engenharia
Arquivo: dinam1.ip
Nome: Simulação de dinâmica I
Conceitos explorados: Leis de Newton
Resumo: Através desta simulação é possível explorar as três Leis de Newton. Dois
blocos são colocados em contato, e então são aplicados duas forças, uma para a
direita no bloco 1 e outra para a esquerda no bloco 2. A intensidade destas forças é
ajustável através de dois controles deslizantes. A velocidade incial do conjunto
também pode ser controlada desta forma.
Código da Disciplina: 1EB176 – FÍSICA I
155
FAAP – Faculdade Engenharia
Arquivo: elevador.ip
Nome: Simulação do problema do elevador
Conceitos explorados: Força normal, Leis de Newton
Resumo: Esta simulação explora o conceito de força normal através do clássico
experimento do peso aparente observado por uma pessoa que está sobre uma
balança que se encontra dentro de um elevador. O elevador pode estar acelerando,
desacelerando ou se movendo com velocidade constante, sendo possível o peso
aparente em cada caso.
Código da Disciplina: 1EB176 – FÍSICA I
156
FAAP – Faculdade Engenharia
Arquivo: pendulo.ip
Nome: Simulação de Pêndulo Simples
Conceitos explorados: Período, amplitude, aproximação de pequenas oscilações
movimento harmônico simples.
Resumo: Esta simulação cria um pêndulo simples, cujas características como
comprimento do fio, ângulo de lançamento, massa do corpo e aceleração da
gravidade podem ser alteradas.
Código da Disciplina: 1EB176 – FÍSICA I
157