1
Universidade do Algarve
Faculdade de Ciências do Mar e do Ambiente
Oceanografia Física
Conteúdo programático da disciplina
de Oceanografia Física (2º Ano – 1º Semestre)
leccionada pelo Prof. Paulo Relvas
em 2000 – 2001 ao curso de:
Oceanografia
Texto gentilmente preparado por Martha Guerreiro
1
2
PROGRAMA
1 – Introdução: Objectivos e conceitos básicos;
. origem da água do mar.
2 – Propriedades termodinâmicas da água do mar;
3 – Estratificação e estabilidade no oceano e suas implicações;
. gradiente vertical da densidade;
. conceito de temperatura potencial θ;
. estabilidade estática E;
. frequência de Brunt – Väisälä N e período de oscilação TN;
. implicação da estratificação do oceano.
4 – Propriedades acústicas da água do mar;
. características principais
. velocidade de propagação c;
. factores que influenciam a intensidade acústica;
. velocidade do som: refracção e canais de som;
. Lei de Snell – ângulo de incidência e ângulo crítico;
. zonas de sombra;
. utilização da energia acústica no oceano;
. aplicações da utilização da energia acústica.
5 – Propriedades ópticas da água do mar;
. características principais;
. Lei de Beer – irradiância Γ;
. o efeito scattering e absorção;
. o porque da cor do mar ser verde ou azul;
. medição da luz no oceano – irradiómetros;
. zona eufótica ou fótica.
6 – Balanços, fluxos e equações de conservação no oceano;
. balanço de calor dos oceanos;
. leis gerais da radiação:
•
•
•
•
•
•
irradiância E
irradiância monocromática λm (reflectividade, absorvidade e transmissividade)
Lei de Kirchoff e Emissividade – corpo negro e corpo real
Lei de Stefan – Boltzman
Lei do deslocamento de Wien
Lei de Planck e o espectro da radiação solar
. o termo da energia solar QS:
•
•
•
características principais - albedo
factores que controlam este termo
distribuição zonal deste termo
. o termo da energia terrestre QB:
•
•
•
características principais – radiação infravermelha
factores que controlam este termo
distribuição zonal deste termo
. o termo da energia perca por condução QH:
•
•
características principais – processos turbulentos
factores que controlam este termo
2
3
. o termo do calor latente por evaporação Qe:
•
•
•
características principais – evaporação e precipitação
factores que controlam este termo
distribuição zonal deste termo
. equações de conservação: equação da continuidade:
•
•
•
equação de conservação de massa
equação de conservação de sal
exemplos de aplicação da equação da continuidade
. difusão molecular e turbulenta;
. difusão dupla – salt fingering;
. difusão molecular;
7 – Caracterização e mistura de massas de água. Análise termohalina;
. mistura de 2 de água;
. mistura de 3 de água;
. utilização dos diagramas T-S – estabilidade;
. massas de água do oceano mundial.
8 – A equação do movimento em oceanografia;
. 2ª Lei de Newton – F = ma;
. termos da equação do movimento:
•
•
•
•
o gradiente de pressão;
o termo de Coriolis;
o termo centrípeto e gravitação – aceleração da gravidade;
análise do termo de Coriolis;
. nota acerca do sistema de coordenadas utilizado;
. filtragem das equações do movimento;
. comentários.
9 – Correntes sem atrito e sem curvatura: escoamento geostrófico;
. equilíbrio geostrófico – equação hidrostática;
. escoamento inercial;
. raio inercial, velocidade angular e dia pendular;
10 - Correntes sem atrito e com curvatura: correntes geostróficas;
. geopotencial φ;
. densidade standard e anomalia δ
. distância geopotencial standard, anomalia geopotencial e distância
geopotencial;
. gradientes horizontais de pressão e força do gradiente horizontal de pressão;
•
•
superfície isobárica – igual densidade;
superfície de nível – igual geopotencial.
. equação geostrófica;
. comentários.
3
4
1 - CONCEITOS BÁSICOS
Origem da água do mar: afloramento nas cristas médio oceânicas de água juvenil
proveniente do manto. Esta água nunca esteve anteriormente em estado líquido e
contém em solução muitos componentes da água do mar (cloro, bromo, iodo, carbono,
boro, azoto, etc.). Precisamente os elementos mais abundantes da água juvenil (cloro,
bromo, iodo) são os que faltariam se se quisesse contar apenas com a contribuição da
erosão das rochas para a salinidade da água do mar.
Parece que a salinidade3 dos oceanos não variou muito desde a sua formação. Tendo-se
mostrado quase constante nos últimos 200 milhões de anos (5% do tempo geológico)
Como é que a água do mar tem a composição que se observa e porque é que esta
composição não se altera de modo considerável ao longo do tempo? OCN Química
2 - PROPRIEDADES TERMODINÂMICAS DA ÁGUA DO MAR
Assunto tratado em Intro à OCN: temperatura, salinidade, densidade e pressão da água
do mar.
3 – ESTRATIFICAÇÃO E ESTABILIDADE NO OCEANO E SUAS
IMPLICAÇÕES
A densidade de um volume de controle de água do mar é determinado pela sua
temperatura, salinidade e pressão a que está sujeita.
Para alguns fins é possível ignorar essas pequenas variações na densidade e assumir o
oceano como homogéneo (75% do oceano se não considerarmos a compressão tem a
densidade entre 1026,4 e 1028,1 Kg/m2). Mas para outros fins estas variações são muito
importantes.
Para se determinar a densidade com precisão é necessário um trabalho cuidado e difícil
de laboratório, o que não pode ser, em geral, feito a bordo de um navio. Assim, calculase a densidade recorrendo a valores observando a temperatura, salinidade e pressão,
utilizando a equação de estado da água do mar. um Oceano estratificado
corresponde a um aumento da densidade em profundidade.
Poderá a variação da densidade com a profundidade causar movimento vertical da
água?
Se existir um fluido “mais leve” por cima de um outro fluido “mais pesado” não haverá
a tendência para o movimento vertical. Se o “mais pesado” estiver sobre o “mais leve”
há tendência para que o “mais pesado” afunde e o “mais leve” suba: a distribuição de
densidade é instável.
Temos pois que examinar o gradiente vertical da densidade para determinar se o
fluído (água) é estável (resiste ao movimento vertical), se é neutro (não oferece
resistência ao movimento vertical) ou se é instável (tem tendência para se mover
verticalmente).
Em notação:
∂ρ < 0
∂Z
∂ρ > 0
∂Z
∂ρ = 0
∂Z
estável
instável
valores de Z para cima!
neutro
4
5
Quando consideramos a distribuição de densidade e a sua relação com a estabilidade,
não podemos esquecer a compressibilidade e as trocas de calor com a vizinhança do
volume de controle. O conceito de temperatura potencial θ, permite-nos não
considerar as trocas de calor com a vizinhança.
Vejamos como:
O conceito de θ é uma consequência da 1ª Lei da Termodinâmica – Lei da Conservação
da Energia:
∆Εint = Q + W
Conceito da θ
O nosso sistema é o volume de controle. Se assumirmos que não há trocas de calor com
a vizinhança (ou seja, o processo é adiabático) a variação de energia interna é igual ao
trabalho realizado sobre o volume de controle. Uma vez que a água do mar é
ligeiramente compressível, é realizado trabalho a comprimir a água à medida que ela
afunda e a pressão aumenta.
De acordo com a 1ª Lei da Termodinâmica, vai dar-se um aumento da energia interna
no volume de controle, ou seja, vai observar-se um aumento de temperatura, que é uma
medida da energia interna. O inverso também é verdadeiro, quando se dá uma subida do
nosso volume de controle: a pressão diminui, a água expande-se e a temperatura baixa
(a água expande-se → o trabalho é realizado pelo volume de controle).
EXEMPLO: balão
Considera-se uns quantos litros de água num balão perfeitamente elástico e isolado, a
uma profundidade de 5 000 m e com uma temperatura in situ de 1,00ºC e uma
salinidade de 35psu. Suponhamos que ele sobe até à superfície e que a subida é feita de
forma perfeitamente isolada da água vizinha (ou seja, não há trocas de calor pelas
paredes do balão e por isso o processo é adiabático). A porção de água expande-se à
medida que a pressão diminui e a sua temperatura à superfície não será 1,00ºC, mas sim
0,58ºC. Dizemos então que a temperatura potencial da porção de água é 0,58ºC.
Analogamente também podemos dizer que uma água cuja temperatura à superfície seja
0,58ºC terá uma temperatura de 1,00ºC se for levada de forma adiabática até 5 000 m de
profundidade.
Se calcularmos a densidade, não com a temperatura in situ, mas com a temperatura
potencial temos a densidade potencial θ. Quando falamos de densidade estamos a
falar, obviamente de sigma-t. A densidade potencial, será pois a densidade que terá
uma água quando é trazida à superfície através de um processo adiabático.
Questão a discutir: devido á compressão, a temperatura do Oceano aumenta em
profundidade. No entanto não é isso que se verifica! Porquê? De qualquer maneira, em
regiões profundas e em quase todo o Oceano Pacífico a água é isotérmica relativamente
à temperatura potencial.
Define-se estabilidade estática E, como a taxa de crescimento da densidade com Z,
normalizada (daí o factor 1/ρ, para normalizar na densidade!):
E = 1 ∂ρ
ρ ∂Z
A estabilidade estática é uma medida do trabalho que é necessário realizar para mover
uma partícula de água para cima ou para baixo na coluna de água.
5
6
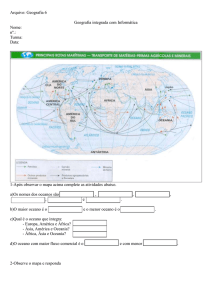
EXEMPLO: partícula de água
-
Quanto mais horizontal for a isopícnica potencial mais difícil será quebrar a
estabilidade do oceano.
-
Logo, no processo A o trabalho realizado sobre a partícula de água é menor do
que no processo B, pois como o oceano é mais estável quanto mais horizontais
forem as isopícnicas mais difícil será quebrar a estabilidade. Para quebrar esse
equilíbrio será necessário realizar um maior trabalho.
Densidade potencial sigma-t
Densidade potencial sigma-t
Partícula de
água
Isopícnica
potencial
Partícula de
água
Posição de
equilíbrio
Posição de
equilíbrio
profundidade
profundidade
A
B
Consideremos o processo adiabático.
Quando a partícula de água é deslocada para cima é mais pesada que a água circundante
e as buoyont forces (forças de impulsão) tendem a puxa-la para baixo. Quando é
deslocada para baixo, é mais leve e as forças tendem a puxar para cima, para a sua
posição de equilíbrio.
Para mover a partícula da posição de equilíbrio é necessário realizar trabalho, que será
tanto maior quanto maior for o gradiente de densidade. Para o mesmo deslocamento
vertical, é necessário mais trabalho se a isopícnica potencial estiver mais na horizontal.
No entanto, é errado usar a densidade in situ para calcular estes trabalhos porque:
- a densidade da partícula (volume controle) isolada varia conforme ela expande
ou contrai ao subir e ao descer.
- Contudo, a partícula vai expandir-se um pouco menos quando sobe e contrair-se
um pouco menos quando desce do que seria de esperar devido à
compressibilidade que provoca a subida da temperatura da partícula, e por isso
uma expansão, à medida que a partícula desce, e provoca a descida da
temperatura da partícula, e por isso uma contracção, à medida que a partícula
sobe.
Assim, o gradiente de densidade eficaz para determinar a estabilidade estática será:
E = 1 ∂ρθ
ρ ∂z
onde ρθ é a densidade potencial (podia ser sigma-t, é o mesmo!) e é uma função de S e
θ, mas não da pressão!
Contudo, uma vez que a compressibilidade varia com a temperatura, a equação escrita
acima, não é exacta. Mostra-se que uma formulação exacta é:
6
7
E = 1 ∂ρ - g _
ρ ∂z
c2
onde ρ é a densidade in situ, g a gravidade e c a velocidade do som na água. Que é
função da temperatura, densidade e pressão.
Em oceanografia usa-se muito uma outra medida da estabilidade estática que é a
frequência de Brunt – Väisälä (N).
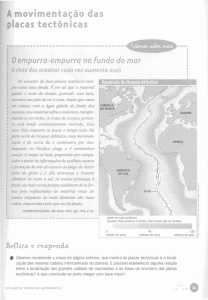
Em referência à figura que esquematiza a subida e a descida de uma partícula de água
ao longo de uma coluna de água – figura abaixo esquematizada – verificamos que as
forças de impulsão, na ausência de atrito, são proporcionais à distância da posição de
equilíbrio e restauram o movimento. Estas são equivalentes às forças que controlam o
movimento de um oscilador harmónico simples, tal como um pêndulo ou uma mola.
Quanto maior o gradiente de densidade maiores serão as forças de impulsão e mais
pequeno será o período de oscilação.
Densidade potencial sigma-t
Densidade potencial sigma-t
Isopícnica
potencial
Partícula de
água
Partícula de
água
Posição de
equilíbrio
Posição de
equilíbrio
profundidade
profundidade
A
tempo
B
tempo
profundidade
profundidade
Referente a A
C
Referente a B
D
A frequência e o período de oscilação são dados por:
N = (g E)½
TN = 2π
π
N
Onde N é a frequência de Brunt-Väisälä.
Os períodos mais pequenos observados no oceano andam à volta de um minuto, o que
corresponde a uma estabilidade de E = 10-3/m. No oceano profundo, onde a estabilidade
é da ordem de 10 -7 a 10 –8/0, o período de Brunt-Väisälä é da ordem de 3 a 5 horas. Em
regiões onde o oceano tenha estabilidade neutra (regiões com θ constante), o período é
infinito!
- A frequência é maior quanto mais horizontal é a isopícnica da densidade, isto é,
quanto mais estável for o oceano maior é a frequência de Brunt-Väisälä.
7
8
-
Num oceano com isopícnicas mais afastadas o mesmo deslocamento provoca
menor diferença entre a densidade da partícula e a densidade do oceano, onde as
isopícnicas estejam mais apertadas; num oceano com isopícnicas mais apertadas
o mesmo deslocamento provoca maior diferença entre a densidade da partícula e
do oceano, logo as forças de impulsão também são maiores.
Implicação da estratificação do oceano:
Mistura vertical: quanto mais estratificado for um oceano, mais trabalho é necessário
para o misturar. Logo, quanto menos estratificado (ou seja, mas bem misturado) for um
oceano, maior a sua energia potencial. Os ventos misturam a camada superficial do
oceano, formando a camada de mistura - mixed layer:
Energia cinética vento
realização de trabalho
energia potencial oceano superficial
É necessário muito mais energia para misturar uma termoclina pronunciada (à
superfície) do que o oceano profundo, pouco estratificado.
Quanto mais pronunciada for a picnoclina do oceano maior terá de ser a energia cinética
do vento para que haja a mistura de águas.
Mistura horizontal: a mistura ao longo das isopícnicas é muito mais fácil que
perpendicularmente às isopícnicas (num factor de 10 8). É necessário pouco trabalho
para misturar ao longo das linhas de igual densidade. As isopícnicas são, em geral,
quase horizontais no oceano aberto.
Logo, a mistura horizontal é muito mais fácil que a mistura vertical no oceano, por
consideração de ordem energética.
4 – PROPRIEDADES ACÚSTICAS DA ÁGUA DO MAR
O som propaga-se de forma muito mais eficaz na água do que no ar, ao contrário da luz.
Apesar do som e da luz se propagarem como ondas, elas são fundamentalmente
diferentes:
- o som propaga-se por ondas longitudinais e a luz por ondas transversais;
- a luz é uma forma de energia electromagnética e propaga-se melhor no vácuo e,
em geral pior à medida que a densidade do meio vai aumentando;
- a propagação do som envolve a vibração do material de que é composto o meio
onde se propaga e por isso, em geral, propaga-se melhor em sólidos e em
líquidos e pior em gases e não se propaga no vazio, obviamente!
- O som é uma espécie de onda de pressão que se propaga por vibração que
produz zonas alternadas de compressão e rarefacção. Por isso, todo o som resulta
de uma vibração (altifalante). Quanto maior for a amplitude da onda sonora
maior será o som emitido. As ondas sonoras não são sinusoides, tal como é
costume considerar o movimento ondulatório.
Mas a pressão acústica sobe e desce de forma sinusoidal conforme a onda passa.
8
9
Podemos assim considerar as ondas sonoras pela sua amplitude (uma medida da altura
do som e frequência f ou comprimento de onda λ que estão relacionados com a
velocidade de propagação c pela equação:
c=fλ
Alta pressão (+)
Baixa pressão (-)
Características principais das ondas sonoras:
Os c.d.o. da energia acústica que interessam no oceano variam entre 1mm e 50 m.
Tomando a velocidade do som na água do mar como 1 500 m/s, isto corresponde a
frequências entre 30Hz e 1,5MHz. (frequências acima de 20KHz não são normalmente
audíveis pelo Homem)
Quando a energia acústica é emitida uniformemente em todas as direcções (oceano
homogéneo) por uma fonte pontual no meio de uma massa de água, ele propaga-se
produzindo superfícies esféricas de pressão constante, centradas na fonte.
A intensidade acústica decresce com a distância à fonte sonora como resultado de:
-
-
distribuição da energia acústica por superfícies esféricas cada vez maiores. A
superfície da esfera é proporcional a r 2 (4π
πr 2), sendo r a distância à fonte e o
raio da esfera. Portanto a atenuação é proporcional ao quadrado da distância
percorrida pela onda e independente da frequência;
atenuação devido à absorção, logo a conversão da energia acústica em calor e
energia interna; dispersão – scattering devido à reflexão por partículas em
suspensão e bolhas de ar. A dispersão é bastante independente da frequência,
mas a absorção não!
Velocidade do som: refracção e canais de som:
A velocidade de propagação de ondas de compressão (longitudinais), como é o som, é
dada por:
c = √ (módulo axial / densidade)
o módulo axial de um material é uma medida da sua elasticidade e tem a ver com a
capacidade do meio para retomar a sua forma original depois de uma compressão e com
a resistência a essa compressão.
9
10
O módulo axial da água é maior do que o do ar.
Quer o módulo axial quer a densidade dependem da temperatura, densidade e pressão e
c é uma função complexa destas 3 variáveis no oceano!
- Aumentar a temperatura da água do mar, faz diminuir a densidade e, pela equação
acima, verificamos que c aumenta com a temperatura da água do oceano.
- Nos níveis superiores do oceano, o aumento de 1ºC na temperatura provoca um
aumento de cerca de 3m/s em c:
T↑ → ρ↓ → c↑
- Aumentar a salinidade corresponde a aumentar a densidade e assim, a c deveria
diminuir com a salinidade; contudo, aumentar a salinidade também aumenta o módulo
axial (a água fica menos compressível o que contraria e se sobrepõe ao aumento da
densidade).
- Para a camada superior do oceano o aumento de 1 s.p.u. provoca um aumento de 1,1
m/s em c. Por isso, a c na água do mar é maior que em água doce (salgada possui uma S
maior do que a água doce):
S ↑ → ρ ↑ → módulo axial ↑ → c ↑
- A c aumenta com a profundidade no oceano (excepto no canal de som). O aumento do
módulo axial com a pressão é maior que o correspondente aumento de densidade por
isso c aumenta em profundidade.
- Um aumento de 100 m de profundidade corresponde a um aumento de 10 atm (10 6
N/m2) na pressão (equação do equilíbrio hidrostático) e o resultado é um aumento de 1,8
m/s em c:
P ↑ → ρ ↑ → módulo axial ↑ → c ↑
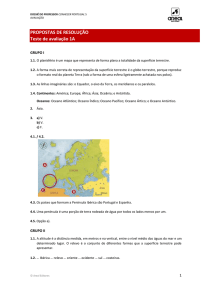
. Na camada de mistura (região I) a T e a S são relativamente ctes , e assim c é
controlado em grande parte pela P.
. Nas camadas superiores do oceano, mais abaixo da camada de mistura, as variações de
temperatura são muito grandes e c é controlado principalmente por esta variável e em
menor grau pela salinidade e pela pressão.
. Na termoclina permanente (região II), c é largamente controlado por T e S.
. Abaixo da termoclina permanente (região III) nem T nem S variam muito, e a pressão
torna-se novamente o factor dominante em c.
10
Velocidade do som (m/s)
Região I
11
500
Região II
1000
1500
Profundidade (m)
2000
Região III
2500
3000
Para o cálculo da velocidade do som, utiliza-se uma fórmula empírica válida para a
temperatura entre 6 e 17ºC, considerando-se apenas 3 variáveis: T, S e profundidade.
Também podemos utilizar para esse cálculo o Polinómio de Wilson e muitas outras tais
como: Kuwahara (1938), Matheus (1939) e Del Grasso.
Refracção:
Uma onda acústica que se desloca verticalmente no oceano não será significativamente
afectada pela refracção, porque viaja essencialmente na perpendicular das interfaces
entre camadas de diferentes densidades e, por isso de diferentes velocidades do som.
Contudo, se se deslocar horizontalmente sofre um considerável efeito da refracção,
porque encontra as interfaces com ângulos pequenos e por isso, a propagação dá-se em
trajectórias curvas.
A relação entre o ângulo de incidência (φ1), o ângulo de refracção (φ2) e a velocidade do
som em duas camadas (c1 e c2) é dada pela Lei de Snell:
C1 = cos φ1
C2
cos φ2
φ1
Com c1 > c2
c1
φ2
Com c1 < c2
c1
c2
1
φ1
φ2
c2
1
O ângulo crítico φc , abaixo do qual o som é mantido na camada onde a velocidade de
propagação é menor (c2). Neste caso não temos refracção, como acima demostrado, mas
sim reflexão quando uma onda sonora passa para uma camada de maior velocidade de
propagação:
cos φc = c1
c1
Com c1 > c2
11
c2
φc
1
12
c2
Pode ser mostrado que, com um gradiente vertical de velocidade do som (∂ c / ∂ z, cte) a
propagação desenha uma arco de curvatura cujo o raio é:
rc = ______c 0_______
(dc/dz) cos φ 0
onde φ 0 é o ângulo da propagação sonora com a horizontal.
c0
c
r
φ0
rc
z
z
O raio de curvatura, r c, é definido em termos do ângulo inicial, φ 0, e do gradiente
vertical da velocidade.
A existência de uma termoclina complica o problema de transmissão da energia sonora
na camada superficial do oceano.
Por causa da termoclina, o som pode ser refractado de tal maneira que se forma uma
zona de sombra onde o som não se propaga.
Os caminhos seguidos pelas ondas acústicas podem ser determinados conhecendo o
valor de c no oceano e diagramas de raios podem ser desenhados.
Os raios são linhas perpendiculares à frente de onda e por isso, representam a direcção
de propagação.
Formam-se também regiões onde os raios sonoros ficam aprisionados por refracção na
fronteira entre regiões com diferentes gradientes verticais da velocidade do som. A estas
regiões chama-se canais de som e guiam a propagação do som no oceano.
A atenuação devido ao espalhamento da energia sonora num canal de som é
proporcional apenas à distância percorrida. Isto porque a energia num canal de som fica
limitada entre duas superfícies horizontais. Assim, as superfícies de pressão acústica cte
são cilíndricas e não esféricas, ou seja,: o som é menos atenuado quando se propaga nos
canais de som.
c→
φ
1
φ
2
prof
φ3
A propagação do som curva por refracção
sucessiva em camadas com diferente
velocidade do som.
12
13
A zona de sombra é definida por raios limite, reflectidos
na superfície e/ou refractados na fronteira entre a região
I e II. A fronteira entre a região II e III, é definida como
sendo um canal de som onde as ondas acústicas ficam
aprisionadas.
Na região I o gradiente vertical da velocidade do som é
inverso, e devido a isso a propagação da onda acústica
é refractada para cima; na região II o gradiente vertical da
velocidade do som é positivo fazendo com que a propagação
da onda acústica seja refractada para baixo.
Velocidade do som
I
II
III
prof
Utilização da energia acústica no oceano:
A grande desvantagem no uso de ondas sonoras em comparação com as ondas
luminosas, é o seu muito maior c.d.o. (logo menor frequência) o que quer dizer que a
resolução que podemos obter é muito menor, ou seja, o menor objecto que possa ser
observado por ondas sonoras (cerca de 3 c.d.o.) é muito maior que com ondas
luminosas.
Para obter a resolução máxima com sistemas de acústica submarina devemos usar a
frequência máxima possível. Mas a atenuação é maior a altas frequências que a baixas!
Por isso é necessário chegar a compromissos consoante a aplicação e verificar o que em
cada caso é mais importante, se o range se a resolução.
EXEMPLO: a 5KHz a atenuação é 3% por Km e a 30KHz é de 70% por Km.
Isto pode ser demostrado através da fórmula matemática c = λ x f :
c = 1500 m/s e f = 30 KHz (= 30 000 Hz) ficamos com um λ de 5 cm (= 0,05 m) mas se
a frequência diminuir para 5 KHz o seu λ já será de 33 cm.
Isto é: a energia acústica só nos permite detectar objectos com o triplo do seu
comprimento de onda, o que nos impossibilita de observar objectos de pequenas
dimensões: chegar longe → baixa frequência → fraca resolução. Quando utilizamos
frequências mais altas, esta energia é absorvida pelo meio, fazendo com que a resolução
da imagem seja maior.
Aplicações:
Sistemas passivos: só escutam os sons pré-existentes nos oceanos.
. Hidrofones receptores – ouvem os sons presentes no oceano (baleias, submarinos, etc.)
Sistemas Activos: emitem o som e esperam o seu retorno.
. SONAR (Sound Navigation And Ranging) – é emitido um sinal e escutado a resposta.
Conhecendo c (T, S, p) calcula-se a distância. Usa-se na detecção de objectos e para
topografia de fundos quando o sinal é enviado na vertical.
. Telemetria e seguimento de objectos SOFAR (Sound Fixing And Ranging) - objectos
podem ser localizados e seguidos se estiverem equipados com transmissores acústicos.
SOFAR FLOATS- ajustado para uma determinada profundidade vagueiam na corrente
13
14
dominante a uma profundidade. Trabalham melhor em canais de som. Podem ser
manobrados a milhares de km.
. DRIFTER – bóias derivantes calibradas que em equilíbrio estão mergulhadas a 50 m
de profundidade e podem ser manobradas e captadas a milhares de Km.
. Medições de correntes – efeito de Doppler: o desvio de Doppler em frequência é
proporcional à velocidade da corrente → ADCP’s (perfis das correntes acústicas por
efeito de Doppler).
5 – PROPRIEDADES ÓPTICAS DA ÁGUA DO MAR:
O oceano é quase opaco à radiação electromagnética, excepto para uma pequena banda
centrada nos c.d.o. do visível, mas mesmo nessa faixa, a transmissão de energia é
limitada. A luz viaja apenas pequenas distâncias no oceano e a grande parte do oceano é
quase completamente escura. Para os animais oceânicos a audição é o mais importante
dos sentidos, e não a visão! A detecção remota dentro de água não se faz em radiação
electromagnética (ao contrário da detecção remota atmosférica), mas sim com ondas
sonoras.
A luz é uma forma de radiação electromagnética, que viaja a ≈ 3 x 108 m/s no vácuo e a
≈ 2,2 x 108 m/s no oceano. A radiação electromagnética dos oceanos encontra-se
dispersa entre os c.d.o. 0,4 e 0,76 nm.
A intensidade da luz ao propagar-se no oceano diminui exponencialmente com a
distância à fonte, seguindo a Lei de Beer:
Γ2 = e - ε
Γ1
(z – z )
2 1
onde Γ é o fluxo de energia radiante (irradiância) às profundidades z2 e z1. A irradiância
é o fluxo de energia radiante normal ao plano horizontal:
Γ (W/m2) =
E___
Axt
ε é o coeficiente de atenuação, que inclui o efeito do scattering e absorção.
A atenuação é um efeito conjunto da absorção e do scattering.
A absorção corresponde à conversão da energia electromagnética em energia interna
através de calor, ou à conversão em energia química (fotossíntese).
O scattering corresponde à mudança de direcção da energia electromagnética, como
resultado de reflecções múltiplas nas partículas em suspensão.
Quer a absorção ou o scattering dependem do c.d.o. e são fortemente influenciados
pelo nível de actividade biológica e pela quantidade de matéria particulado em
suspensão.
Quanto mais for a quantidade de matéria em suspensão e actividade biológica maior a
absorção e o scattering (maior a turbidez da água).
As águas costeiras são particularmente túrbidas e as regiões centrais do oceano
particularmente límpidas. A camada do oceano iluminada pela radiação solar, zona
fótica ou eufótica e cuja intensidade é suficiente para a produção primária fotossintética
fica muito turva devido à grande quantidade de organismos, sendo principalmente
nestas zonas onde estes dois factores (absorção e scattering) são maiores.
14
15
A quantidade de radiação dispersa e difundida de é pouco dependente do c.d.o. em
quantidade mas não em qualidade. Depende assim, da relação do c.d.o. incidente e a
dimensão das partículas que provocam a dispersão e a difusão.
Porque é que existem regiões no oceano que são azuis enquanto outras são verdes?
A cor do oceano varia de azul escuro a amarelo-esverdeado.
Azul-escuro – regiões equatoriais e tropicais onde há pouca produtividade primária.
Amarelo-esverdeado – águas costeiras nas altas latitudes com produtividade primárias.
A ausência de matéria particulada minimiza o scattering da radiação solar e a difusão é
sobretudo de Rayleigth, que é uma difusão selectiva dos vários c.d.o. e o oceano aparece
azul (a difusão de Rayleigth ocorre quando as partículas são menores que o c.d.o.
incidente). Grandes concentrações de matéria particulada fazem aumentar a absorção e a
difusão. A difusão provocada por estas partículas maiores é mais uniforme, aparecendo
no oceano mais verde.
O oceano é um absorvedor selectivo da radiação visível. A absorção é maior nos
grandes c.d.o. Quando descemos a 100m de profundidade todo o oceano é azul.
Medição da luz no oceano:
-
Irradiómetro : medem a luz proveniente de qualquer direcção.
Irradiómetros direccionais : medem a radiação luminosa proveniente de uma
única direcção.
Com estes instrumentos, medindo a radiação luminosa a várias profundidades,
calculamos os coeficientes de extinção ou atenuação.
Uma maior turbidez da água tem proporcionalmente mais efeito na luz direccional
que na não direcional. O valor da razão:
Coeficiente de atenuação (luz direcional)
------------------------------------------------------Coeficiente de atenuação difuso (luz não direcional)
pode ser
inferior a 3 em oceano aberto, mas maior que 10 em estuários túrbidos.
-
Medidores de turbidez ou nefelometros : medem directamente a difusão
(scattering) na água. Servem por exemplo, para determinar a matéria em
suspensão. O mais conhecido é o Disco de Secchi (branco, com 20-30cm).
Zona eufótica ou fótica:
É a região até onde penetra a luz, a quantidade de luz proporciona a vida.
Quanto maior a matéria particulada menor será a zona eufótica → esta região é
chamada como a zona do oceano iluminada pela radiação solar e cuja intensidade é
necessária para que possa haver vida.
Num estuário, a extinção da luz dá-se aos 6 m de profundidade devido à grande
quantidade de matéria particulada. Por esta razão, nestas regiões a zona eufótica é muito
pequena.
Superfície → 100% do espectro visível penetram ao longo da coluna de água.
15
16
Ao 1º m de profundidade → 45% de todas as radiações do espectro visível penetram
ao longo da coluna de água, à excepção da radiação infravermelha
Aos 10 m de profundidade → 16% de todas as radiações do espectro visível penetram
ao longo da coluna de água à excepção da radiação violeta e vermelha/amarela.
Aos 100 m de profundidade → 1% de todas as radiações do espectro visível penetram
ao longo da coluna de água, apenas a radiação azul penetra.
6 – BALANÇOS, FLUXOS E EQUÇÃO DE CONSERVAÇÃO NO
OCEANO:
Balanço de calor dos oceanos:
Para a maioria dos casos podemos assumir que todo o calor é trocado com o oceano
através de uma superfície.
A única outra fonte significativa de calor é a própria terra. Contudo apenas 1/20 W/m2
chega ao oceano através dos fundos marinhos o que é pouco comparado com o valor
médio de 200 W/m2 que chega ao oceano e é absorvido por ele através da superfície.
Numa primeira aproximação, a temperatura média do oceano não varia. Isto quer dizer
que a quantidade de calor que entra no oceano é a mesma que sai, em termos médios.
Trocas significativas de calor dão-se através da superfície do oceano por 4 processos:
Qs → radiação electromagnética de pequeno c.d.o. de origem solar.
Qb → radiação electromagnética de grande c.d.o. emitida pela superfície do oceano e
radiação emitida na mesma banda pela atmosfera suprajacente.
Qe → calor latente perdido por evaporação à superfície (ou ganho no caso de haver
condensação de vapor de água de atmosfera sobre a superfície do mar).
Qh → calor trocado por condução entre a atmosfera e o oceano quando atmosfera e
oceano estão a temperaturas diferentes.
Podemos então escrever uma Equação de Balanço:
Qs = Qb + Qe + Qh
Onde Q representa fluxos médios, no espaço e no tempo, da energia calorifica trocada
através da superfície do oceano.
Apesar de haver um balanço global, o balanço destes 4 termos pode não ocorrer (e em
geral não ocorre) para regiões do oceano ou para períodos de tempo limitados (1 dia, um
mês). Por exemplo, o calor que entra no oceano durante o verão faz subir a temperatura
da água do oceano e o mesmo calor é perdido no Inverno, quando a temperatura desce.
Também em termos espaciais, o oceano recebe mais energia sob a forma de calor nas
latitudes tropicais do que aquela que perde, havendo depois transporte de calor para
norte por advecção, onde o excesso é perdido.
A causa primeira da circulação da atmosfera e do oceano é o ganho bruto de energia
calorífica nas baixas latitudes e a perca bruta de energia nas altas latitudes.
Incluindo o armazenamento ou libertação de calor na camada superficial do oceano,
podemos escrever:
QT = Qs - Qb - Qe - Qh – Qv
Qv → advecção de calor para fora (ou para dentro) da região considerada
QT → armazenamento (positivo ou negativo) de calor associado à variação da
temperatura da água na região considerada e que representa o ganho ou a perda
resultante dos outros fluxos.
16
17
Apesar de conhecermos os processos que controlam as trocas de energia sob a forma de
calor na interface oceano – atmosfera, os valores absolutos destas trocas não são bem
conhecidos porque são de difícil determinação.
O processo melhor conhecido é a entrada da energia da radiação solar no oceano.
Há alguma discussão sobre a importância relativa dos outros termos e há alguma
incerteza sobre os seus valores numéricos.
A quantidade de calor disponível para aquecer o oceano num dado período de tempo
será:
t
t
∫ QT dt = 0∫ (Qs - Qb - Qe - Qh) dt
0
Leis gerais da radiação:
Sabe-se desde Privost (1790), que todo o corpo emite energia radiante, cujas
características dependem fundamentalmente da sua temperatura. É por isso que a
atmosfera, os oceanos e os continentes emitem para o espaço radiação própria de acordo
com a sua temperatura. Esta não é visível porque se situa na região do infravermelho do
espectro electromagnético. É esta radiação que é utilizada, por exemplo nos binóculos
de visão nocturna.
Nem todos os corpos emitem energia ao mesmo ritmo. Designamos por fluxo radiante φ
a taxa de emissão de energia radiante, expressa em J/s ou Watts.
O fluxo radiante do sol é ≈ 3,90 x 10 26 Watts. Se dividirmos o fluxo radiante pela área
da superfície emissora, obtemos a irradiância E, em Watts/m2.
A irradiância do sol, cujo raio é ≈ 7 x 10 8 m é portanto:
E SOL = 3,90 x 10 26 = 6,34 x 10 7 W/m2
4 π (7 x 10 8)2
A irradiância E depende do c.d.o. da radiação emitida.
Define-se irradiância monocromática Eλ como a irradiância de um determinado c.d.o.
que se avalia em Watts/m2µ.
Em geral, a irradiância que incide sobre um elemento de área é considerada por
radiações com direcções diferentes. Chama-se radiância à fracção da irradiância que
provém de um feixe com uma dada direcção e cuja abertura é um ângulo sólido
elementar, dw, e avalia-se em Watts/m2esteroradiano.
O Sol observado da Terra, pode ser considerado como uma fonte pontual o que nos leva
a aceitar que a radiação solar que atinge a Terra é constituída por feixes paralelos
permitindo eliminar o efeito global do ângulo sólido. Podemos assim aceitar que a
radiação solar provém de uma única direcção.
Consideremos a radiação monocromática Eλ (inc) que incide na superfície de um corpo,
parcialmente opaco para essa radiação.
1 - Uma parte desta radiação Eλ (ref) é reenviada para o espaço por reflexão.
2 - Outra parte, Eλ (abs) penetra no corpo e é absorvido por ele.
3 - A parte restante, Eλ (trans) é transmitida sob a forma de energia radiante.
Pelo Princípio da Conservação da Energia (1ª Lei da Termodinâmica), tem que se
verificar para a radiação de c.d.o. λ a equação:
Eλ (inc) = Eλ (ref) + Eλ (abs) + Eλ (trans)
17
18
Se dividirmos pela irradiância monocromática incidente, Eλ (inc), temos:
1 = Eλ (ref) + Eλ (abs) + Eλ (trans) → 1 = r λ + a λ + t λ
Eλ (inc) Eλ (inc) Eλ (inc)
Em que r λ é a reflectividade, a λ a absorvidade e t λ a transmissividade. Estas grandezas
são adimensionais e só podem ter valores entre 0 e 1.
Lei de Kirchoff e Emissividade:
Um corpo emite energia radiante que depende da sua temperatura.
À irradiância específica monocromática, de c.d.o. λ emitida pelo corpo, chama-se poder
emissivo para o c.d.o. λ e representa-se por eλ.
Kirchoff (1860) mostrou que o poder emissivo e a absorvidade não são independentes e
estão relacionadas por uma lei simples que diz que o quociente eλ / aλ é uma função
universal da temperatura e do c.d.o. λ:
eλ = f (λ
λ, T)
emissividade
aλ
A lei mostra que a emissão só pode ocorrer para os c.d.o. em que ocorra a absorção. O
quociente anterior designa-se por emissividade e diz que para um dado c.d.o. λ, a
emissividade só depende da temperatura e é independente da natureza do corpo.
- Esta lei mostra que a função dependente da T e λ, representa o poder emissivo do
corpo negro para a temperatura e o c.d.o. considerados.
Corpo negro: um copo que absorve integralmente toda a radiação emitida. Constitui
um caso ideal, limite, em que aλ = 1, enquanto a reflectividade rλ = 0 e a
transmissividade tλ = 0 para todos os c.d.o. λ.
Corpo branco: se aλ = 0.
Corpo cinzento: se 0 < aλ < 1 para qualquer c.d.o.
Podemos ainda dizer que um corpo pode comportar como corpo branco para certos
c.d.o. e como corpo cinzento para outros c.d.o..
Para os corpos reais, temos aλ < 1 e, por isso também eλ < f (λ
λ, T). Logo o poder
emissivo de um corpo real para um dado c.d.o. é sempre inferior ao do corpo negro à
mesma temperatura. O poder emissivo do corpo negro é o valor máximo limite dos
poderes emissivos dos corpos reais.
Leis de Stefan – Boltzman e de Wien:
Primeiro Stefan (1879) por via experimental e depois Boltzman (1894), por via teórica,
mostraram que a interpretação de f (λ
λ, T) em todas as direcções e em todos os c.d.o. ,
que define a irradiância do corpo negro E:
E = f (λ
λ, T) . dλ
λ= σT4
Com a temperatura em K e σ é uma cte cujo valor mais provável é 5,67 x 10
K4(cte de Boltzman).
–8
W/m2
18
19
É através desta Lei que se faz a detecção remota utilizada em OCN, através de satélite
(por exemplo: Corrente do Golfo, Upweeling...). A detecção remota terrestre faz-se
entre 10,5 e 12,5 µm (infravermelho), onde ocorre o pico da curva de emissão do corpo
negro para a radiação terrestre.
A Lei de Stefan pode ser utilizada para obter o valor da temperatura do sol, se
assumirmos que este se comporta como um corpo negro que emite a mesma quantidade
de radiação que o Sol. Já vimos que a irradiância solar é 6,34 x 10 7 W/m2. Logo:
TE = 4√ (E /
) = 4√ (6,34 x 10 7 / 5,67 x 10 -8) = 5780º K
A esta temperatura chama-se temperatura efectiva do Sol (TE).
Em 1893, Wien mostrou aquilo que ficaria conhecido como a Lei do Deslocamento de
Wien: o c.d.o. para o qual o poder emissivo do corpo negro é máximo varia na região
inversa da temperatura absoluta do corpo, ou seja:
λm T = A
em que A é uma cte de valor 2897 µm . K
O c.d.o. λm que corresponde ao máximo de intensidade da radiação emitido, desloca-se
para menores c.d.o. à medida que a temperatura aumenta. Quanto mais elevada for a
temperatura do corpo, menor é o valor de λm e maior vai ser a frequência f.
A partir desta Lei podemos estimar a temperatura de um corpo qualquer que emita um
qualquer tipo de radiação nos vários c.d.o. a partir do conhecimento do seu espectro de
emissão. No caso do Sol, o valor máximo do poder emissivo corresponde ao verde –
amarelado, cujo c.d.o. é 0,475 µm. Logo, a temperatura de cor do sol é:
T = 2897/λ
λm = 2897 / 0,475 = 6100º K
O sol parece mais amarelo que azul devido à assimetria da curva do espectro, em que a
maior parte da radiação é emitida em c.d.o. superiores aos do máximo da irradiância .
O c.d.o. ao qual corresponde a máxima radiação emitida, desloca-se para os pequenos
c.d.o. à medida que a temperatura diminui.
A Lei de Wien, explica o porque da radiação solar estar concentrada na região do visível
e do infravermelho próximo, enquanto que a radiação terrestre está largamente no limite
do infravermelho.
Lei de Planck e o espectro da Radiação Solar
A Lei de Stefan – Boltzman integra a função f (λ
λ, T) em todas as direcções e para todos
os c.d.o.
Em 1896, também Wien, propôs uma forma para f (λ
λ, T) mas que só se verificava para
os pequenos c.d.o.
Em 1900, Rayleigth e Jeans propuseram uma forma para a mesma função f (λ
λ, T) só
que desta vez verificava-se apenas para grandes c.d.o.
Estávamos perante um paradoxo!
19
20
A fundamentação de Rayleigth e Jeans era brilhante, mas a sua forma proposta para f
(λ
λ, T) não estava de acordo com a experiência para os pequenos c.d.o. Foi a chamada
catástrofe do ultravioleta, porque só ai a Lei de Rayleigth – Jeans falhava.
O fim da tragédia ocorreu em 1901, quando Planck introduziu a ideia de que a emissão
da energia se faz de forma descontínua, por quantidades de energia proporcionais à
frequência. A forma de f (λ
λ, T) proposto por Planck e que satisfaz todas as condições é:
f (λ
λ, T) =
c 1 λ-5 ___
e (c2 / λ T ) – 1
os c.d.o. vêm expressos em cm, T em º K e c1 e c2 são ctes (c1 = 1,777 x 10-12 cal/cm2min
e c2 = 1,432 cm . K)
Para um corpo negro f (λ
λ, T) não é mais que o seu poder emissivo E(λ
λ, T) para o c.d.o.
e temperatura considerada → Lei de Kirchoff
É pois com base na Lei de Planck que se desenham os espectros de radiação do corpo
negro a diversas temperaturas: se fixarmos sucessivamente os valores da temperatura,
podem representar-se graficamente as curvas de Planck para cada temperatura que dão a
distribuição do poder emissivo do corpo negro.
Esta lei tem sido confirmada para valores muito afastados de λ e T. Além de satisfazer
às Leis de Wien e Rayleigth – Jeans, contém também como corolários as Leis de Stefan
e do deslocamento de Wien.
A distribuição espectral de energia radiante emitido pelo Sol segue de muito perto a
distribuição correspondente à Lei de Planck para uma temperatura de 6000º K.
A temperatura média do disco solar é portanto desta ordem de grandeza. A temperatura
efectiva do Sol (Stefan) é ligeiramente inferior à temperatura de cor (Wien). A
diferença é devida à absorção da radiação de pequenos c.d.o. nas camadas exteriores do
Sol, mas que não afecta a posição de λm.
Justifica-se portanto que no tratamento de muitos problemas relativos à radiação solar se
acerte que o sol emite energia como um corpo negro a 6000º K.
O termo Qs (Energia Solar):
Este termo (tal como Qh) obedece às Leis que acabámos de enunciar.
Ao analisar o espectro da radiação solar, verificamos que:
- 49% da energia é do visível (0,4 a 0,7 µ)
- 9% da energia é ultravioleta
- os restantes 42% estão no infravermelho
- 99% da energia tem um c.d.o. menor que 4µ
- a energia máxima ocorre com o c.d.o. ≈ 0,5µ, de acordo com a Lei de Wien.
Uma superfície plana colocada no topo da atmosfera perpendicularmente aos raios
solares recebe cerca de 1360 W/m2. Este valor varia um pouco devido à variação na
distância Terra – Sol e devido à actividade solar. Contudo, este valor médio é chamado
cte solar.
O topo da atmosfera recebe uma quantidade de energia igual à cte solar vezes a radiação
terrestre que intersecta a radiação solar (π r 2, com o r sendo o raio da Terra):
E INTERSECTADA = π x r 2 x cte
20
21
Durante 24 horas, esta energia solar distribui-se pela superfície da Terra (4π r 2) de tal
forma que a energia média recebida é 340 W/m2 (ou por cada m2 cerca de 30 x 10 6 J/m2
. dia). Este fluxo de energia varia com a declinação do sol:
-
pólos varia entre 0 e 450 W/m2;
a 40º de latitude varia entre 150 e 420 W/m2,
note-se que o Hemisfério Sul recebe durante o ano mais energia solar que o Hemisfério
Norte, porque a Terra está no periélio (o Sol encontra-se mais perto da Terra) durante o
Verão no H. Sul e no afélio (o Sol encontra-se mais afastado da Terra) durante o Verão
do H. Norte.
Repare-se que os valores estão muito dependentes do número de horas que o Sol está
acima do horizonte – insolação astronómica.
Desde o topo da atmosfera até à superfície do planeta, a radiação solar é atenuada por
vários processos:
1 – reflectido de novo para o espaço;
2 – absorvida pela atmosfera e pelo vapor de água e assim aquece a atmosfera;
3 – difundida (scattering) e chega à superfície na forma de radiação difusa;
4 – uma pequena quantidade é envolvida em reacções químicas.
Apenas cerca de 50% da radiação solar que incide no topo da atmosfera atinge a
superfície do planeta, podendo então ser absorvida pelos continentes e oceanos.
Dos outros 50% que não chegam, 30% são reflectidos directamente para o espaço
(albedo planetário: de uma superfície é a percentagem de energia radiante incidente que
é imediatamente reflectida pela própria superfície) e 20% são absorvidas pela atmosfera.
Esta absorção depende do c.d.o.: há pouca absorção na banda do visível, a qual ocorre
sobretudo no infravermelho e também no ultravioleta (pelo ozono).
Uma parte significativa da energia solar que atravessa a atmosfera é difundida pelas
partículas de ar e chega à superfície da terra sob a forma de radiação difusa. Se a
radiação não fosse difundida o céu seria escuro tal como é o espaço exterior.
Radiação GLOBAL = Radiação DIRECTA + Radiação DIFUSA
A difusão da luz azul (λ ≈ 0,4 µ) é muito mais efectiva (difusão de Rayleigth, tal como
no oceano) e por isso o céu é azul. Os tons avermelhados do pôr-do-sol são devidos à
difusão por partículas de maiores dimensões (tal como poeiras – difusão de Mie).
O albedo de uma superfície é a percentagem de energia radiante que é reflectida pela
superfície. O albedo da superfície do oceano varia entre:
-
30% quando o Sol está muito baixo e a superfície do mar está espelhada;
e 3% quando o Sol está alto e a superfície do mar rugosa, com ondas na escala
dos centímetros – ondas capilares.
O valor médio aceite para o albedo do oceano anda em torno de 6%, o que é dos mais
baixos do planeta.
21
22
O albedo de várias superfícies, em percentagens:
. areia → 18 – 28;
. prados e plantações → 15 – 25;
. florestas → 14 – 20;
. florestas densas → 5 – 10;
. neve fresca → 75 – 95;
. neve velha → 40 – 60;
. zonas urbanas → 14 – 18;
. planeta → 30;
. oceano → 6.
Os factores que controlam o termo Qs são:
-
a absorção na atmosfera que resulta da inclinação do Sol, poluição atmosférica e
nuvens;
reflectividade (albedo) da superfície do oceano;
da duração do dia (insolação potencial) que depende da latitude e do dia do ano.
Distribuição zonal do termo Qs:
A densa cobertura nebulosa existente sobre a região equatorial ao longo do ano dá
origem a um mínimo relativo de Qs numa região em termos médios. Aí a insolação
varia pouco ao longo do ano devido à pequena variação da duração do dia e da
inclinação do sol.
Com o aumento da latitude observam-se variações cada vez maiores que atingem o
máximo nas regiões polares, com dias e noites de 24 horas o que tem uma consequência
interessante. A radiação diária total incidente nas regiões polares durante o Verão é
maior que em qualquer outro ponto do globo.
No entanto, a insolação média anual é fraca, o que aliado ao elevado albedo dos gelos
polares, levam a um mínimo absoluto de Qs nas regiões polares.
Nas latitudes médias, devido principalmente aos grandes anti-ciclones semipermanentes aí existentes (como o dos Açores) que estão associados e céu com pouco
nebulosidade, Qs apresenta os valores máximas.
Qs ligeiramente maior no H. Sul
H. Norte
H. Sul
O termo Qb (Energia Terrestre – back radiation):
Traduz o fluxo resultante da radiação infravermelha emitida pela superfície do mar e da
emitida pela baixa atmosfera, proporcionalmente à quarta potência da temperatura, de
acordo com a Lei de Stefan – Boltzman. Como normalmente a temperatura da água do
mar é superior à do ar suprajacente, o fluxo Qb é geralmente dirigido do mar para o ar.
Observam-se excepções, por exemplo em zonas em que correntes frias se deslocam para
latitudes inferiores onde a temperatura e a humidade do ar são mais elevadas (como por
exemplo a correntes do Labrador) ou, no caso de regiões onde se dê o afloramento de
22
23
águas superficiais mais frias (upwelling), como ocorre na costa portuguesa durante o
Verão com a consequente formação de nevoeiros.
Sentido positivo do termo Qb → se a temperatura for maior na atmosfera, existindo
evaporação fazendo com que a radiação sai da atmosfera e retorne para o oceano.
Sentido negativo do termo Qb → se temperatura da água do mar for mais elevada do que
a da atmosfera sobrejacente, fazendo com que a radiação sai do mar e retorne para a
atmosfera.
Os factores que controlam o termo Qb são:
Contudo, o factor com mais controle do Qb é o conteúdo de vapor de água da atmosfera.
Um aumento da temperatura da água, para a mesma humidade relativa, determina uma
diminuição de Qb (ao contrário do que seria de esperar pela Lei de Stefan – Boltzman).
Este facto paradoxal deve-se ao aumento exponencial do conteúdo em vapor de água na
atmosfera com a temperatura, embora mantendo a humidade relativa cte. Ou seja, para
uma dada humidade relativa a uma temperatura elevada corresponde um conteúdo de
vapor de água muito maior que com a mesma humidade relativa a uma temperatura
baixa (a humidade relativa é uma medida da saturação do ar: quociente entre a tensão de
vapor de água actual e a tensão de vapor de água saturada).
Quanto mais vapor de água houver na atmosfera, mais radiação infravermelha é
absorvida pela atmosfera e mais é reenviada por radiação para a superfície do mar,
fazendo baixar a quantidade total de radiação infravermelha perdida pela superfície do
mar – efeito tampão.
Distribuição zonal do termo Qb:
O termo Qb varia pouco de local para local e de dia para dia, ou mesmo de época para
época, devido à relativamente pequena flutuação dos valores da temperatura da
superfície e da humidade atmosférica e ao efeito tampão descrito acima.
Como a água líquida que existe nas nuvens é opaca para a radiação infravermelha de
origem terrestre (incluindo a banda de 8 a 14 µ onde emitem os oceano) estas reenviam
a radiação de volta para o Globo, desequilibrando Qb a favor da atmosfera.
O termo Qh (perda por condução):
O oceano perde calor por condução para a atmosfera se a temperatura daquele for
superior à desta (como acontece geralmente e vice – versa). Assume-se que na Natureza
este processo dá-se em geral por processos turbulentos de difícil quantificação e mesmo
de tratamento por via teórica.
A formulação empíricas da condução de calor são idênticas às da transferência de calor
latente por evaporação, como veremos.
Camada de Heckman → camada limite oceânica na qual a atmosfera tem influência
Os factores que controlam o termo Qh são:
Assume-se que a condução de calor entre o oceano e atmosfera aumenta com o aumento
da diferença da temperatura entre o oceano superficial e a atmosfera e que aumenta
também com a velocidade do vento.
A formulação mais simples é:
23
24
Qh = c h (Tw –Ta) V
Onde Tw eTa são a temperatura da água à superfície e do ar sobrejacente, V é a
velocidade do vento à superfície e ch uma cte numérica calculada como termo residual
da equação de balanço (valor típico: 15 W/m2 → muito inferior ao valor do termo Qs)
O termo Qe (calor latente por evaporação):
O calor latente necessário para evaporar 1g de água do mar varia ligeiramente quer com
a temperatura quer com a salinidade. Em média são necessários 2400J. Foi estimado por
Budyko que os oceanos perdem por ano devido à evaporação o equivalente a uma
camada de 1,2m de água. Em termos de energia isto corresponde a 100W/m2. estas
estimativas são assumidamente difíceis de fazer e outros autores têm calculado valores
um pouco menores. De qualquer maneira, todas as estimativas concluem que o calor
perdido por evaporação é o maior dos termos de perca na equação do balanço médio (Qs
= Qb + Qe + Qh). No entanto o cálculo do valor de Qe é uma fonte contínua de
frustração. Num modelo não turbulento, o cálculo deste termo seria razoavelmente
preciso, sabendo apenas a temperatura da água e a humidade relativa do ar.
Mas estes processos são muito turbulentos:
- os ventos sopra originando ondas de superfície e turbulência na coluna de ar
suprajacente.
- As ondas rebentam e gotículas de água são espalhadas pelo ar, fornecendo a
evaporação.
- Mesmo na ausência de vento, o facto do oceano estar mais quente que a
atmosfera origina processos convectivos à medida que se dá a evaporação.
Descrever os processos que controlam a evaporação é relativamente simples: o oceano é
em geral um pouco mais quente que a atmosfera suprajacente e a evaporação aumenta à
medida que esta diferença aumenta e à medida que a humidade relativa diminui.
aumenta também com as velocidades dos ventos crescentes. Várias formulações
empíricas têm sido tentadas com base nestes factos. Contudo as diferentes formulações
tentadas podem variar de mais de 30% para um valor típico de 100W/m2.
A formulação mais simples é:
Qe = ce ( ew - ea ) V
Onde ea é a humidade específica a alguma distância da superfície do oceano (a
humidade específica pode ser calculada conhecendo a temperatura e a humidade
relativa), ew é a humidade específica do ar à superfície da água (assumindo que a
temperatura do ar é a mesma da água e a humidade relativa é 100%), V é a velocidade
do vento ao mesmo nível de ce e ea é uma cte numérica.
Algumas formulações não incluem explicitamente a velocidade do vento e contêm uma
função da velocidade do vento que é incluída em ce.
Os factores que controlam o termo Qe são:
Depende de vários factores. Eles são:
- o estado de turbulência do ar;
- do grau de secura do ar;
- e do contraste entre a temperatura do oceano e atmosfera.
Distribuição zonal do termo Qe:
24
25
Devido aos fortes e relativamente ctes ventos alísios que sopram na direcção do equador
entre 30º N e 3º S, a evaporação apresenta máximos absolutos nessas regiões e um
mínimo relativo um pouco a norte do equador, na zona das Calmarias.
Nas latitudes mais elevadas os ventos são mais variáveis e o balanço radiactivo Qs –
Qb, que se torna negativo a partir de 40º S e N, aumento em valor absoluto,
contribuindo para que Qe atinja valores quase nulos nas regiões polares.
Ao longo da longitude (zonalmente) há fortes variações de Qe:
- no bordo Oeste dos grandes giros oceânicos (corrente do Golfo – Atlântico), a
evaporação é muito elevada devido à ocorrência de correntes quentes
deslocando-se para Norte sob massas de ar frio com baixa humidade;
- no bordo Este os valores são mais normais.
Uma vez que a estratificação e os processos turbulentos na interface oceano – atmosfera
afectam quer o termo Qe quer o termo Qh, têm-se realizado tentativas para relacionar os
2 termos, dividindo várias formulações de Qe e de Qh uma pela outra. A razão Qh / Qe é
conhecida como Razão de Bowen (r) – Bowen’s ratio. Estudos mais recentes sugerem
que os 2 processos não se relacionam de forma tão simples como esta razão. No entanto,
dada a elevada incerteza na formulação de Qe e de Qh, a razão de Bowen ainda é usada
em alguns estudos. Assume-se que r é da ordem de 0,1 nas baixas latitudes e aumenta
para cerca de 0,45 a 70º N.
A análise do termo advectivo (Qv) que aparece na equação de balanço local, e o
balanço de massa no oceano, levam-nos às equações de conservação.
Equações de Conservação: Equação da continuidade:
Os balanços de massa (água e sal) globais já foram abordados anteriormente. Aqui
apenas irão ser abordados os locais, nos quais os termos advectivos (Qv) são muito
importantes. È muito comum realizarem-se balanços locais de massa e calor em
investigação oceanográfica.
Para examinarmos as distribuições de sal, calor e outras propriedades e os seus
balanços, temos que considerar as respectivas equações de conservação.
Consideremos um volume cúbico imaginário V, fixo dentro de um fluído, cujos lados
têm área A1, A2,......,A6.
O fluído tem densidade ρ e velocidades de escoamento v variáveis.
25
26
ρ5 ν 5
ρ4 ν 4
ρ1 ν 1
ρ2 ν 2
ρ3 ν 3
ρ6 ν 6
Podemos mostrar que a taxa de variação da densidade (∂
∂ρ / ∂t) dentro do cubo está
relacionado com a soma dos fluxos de matéria através dos 6 lados do cubo, de seguinte
forma:
V ∂ρ = ΣAiρiνi
∂t
em que A i ν i é o caudal em cada face do cubo (i varia de 1 a 6, as faces do cubo).
Uma equação semelhante poderá ser escrita para a salinidade:
V ∂ S = -Σ
ΣAiSiνi
∂t
Se o fluxo de massa (ou sal) que entra no cubo for igual ao que sai do cubo, podemos
escrever:
ΣAiρiνi=0
e
ΣAiSiνi=0
Está explícito nestas equações que não pode haver variações de densidade ou de
salinidade no cubo a não ser por variações nos fluxos de entrada e saída. As
propriedades que cumprem esta condição são chamadas de propriedades conservativas.
As propriedades não conservativas são aquelas que podem variar independentemente
dos fluxos (por exemplo, matérias radioactivas, materiais com actividade biológico,
oxigénio dissolvido, etc.).
As propriedades conservativas diferem das não conservativas porque as primeiras não
têm nem fontes nem sumidouros.
Apesar das equações de conservação poderem ser escritas para muitos fins em termos
de fluxos a entrarem e a saírem de um volume imaginário, estas equações são na
maioria das vezes escritas em termos diferenciais.
26
27
Consideremos um referencial cartesiano, x, y, z (î, ^j e ^k como versores) e u, v e w as
respectivas componentes da velocidade.
Consideremos um pequeno cubo de lado ∆x, ∆y e ∆z dentro de um fluído (volume de
controle). Seja ρ a densidade do fluído dentro do volume de controle.
A sua massa será: ρ ∆x ∆y ∆z = m
Podemos considerar que há escoamento através de todas as faces do cubo de controle,
mas consideremos primeiro a direcção x, como fluxo a entrar de um lado e a sair do
outro:
∆z
ρ1 ν 1
ρ2 ν 2
∆y
∆x
A taxa a que a massa do fluído está a entrar no cubo é: ρ1 u1 ∆y ∆z
A taxa a que a massa do fluído está a sair do cubo é: ρ2 u2 ∆y ∆z
A taxa de variação da massa do cubo é:
∂ m = ∂ (ρ
ρ ∆x ∆y ∆z) = ρ1 u1 ∆y ∆z - ρ2 u2 ∆y ∆z
∂t ∂t
ou:
∂ ρ = ρ1 u 1 - ρ2 u 2
∂t
∆x
∆x
se assumirmos que quer a densidade quer a velocidade variam linearmente ao longo do
volume de controle :
u2 = u1 + ∆u
ρ2 = ρ1 + ∆ ρ
u2 = u + ∆u
u1 = u - ∆ u
2
2
ρ2 = ρ + ∆ ρ
ρ1 = ρ - ∆ ρ
2
2
com u e ρ como valores médios dentro do cubo.
Voltando atrás, para substituirmos na equação:
∂ ρ = ρ1 u 1 - ρ2 u 2
∂t
∆x
∆x
Irá ficar:
∂ ρ ∆x = (ρ
ρ - ∆ρ) (u - ∆u) - (ρ
ρ + ∆ρ) (u + ∆u) =
∂t
2
2
2
2
ρu - ρ∆u - u ∆ρ - ρu - ρ∆u - u ∆ρ
2
2
2
2
onde os termos de ordem superior foram ignorados. Logo:
∂ ρ = - ρ∆u - u ∆ρ
∂t
∆x
∆x
27
28
se o volume de controle for reduzido a um diferencial:
∂ ρ = - ρ∂u - u ∂ρ = - ∂ (ρ
ρu)
∂t
∂x
∂x
∂x
obviamente que o sinal (-) se modifica consoante u1 e/ou ρ1 são maiores ou não que u2
e/ou ρ2 ou conforme a direcção de u1 e/ou u2.
Se fizermos dedução semelhantes para as outras duas direcções (y → ^j; z → ^k),
temos:
∂ ρ = - ∂ (ρ
ρu) - ∂ (ρ
ρv) - ∂ (ρ
ρw)
∂t
∂x
∂y
∂z
ou no caso de um fluído incompressível (ρ = cte); como:
∂ρ = ∂ρ= ∂ρ= ∂ρ
∂t
∂x
∂y ∂z
então iremos ter :
∂u+ ∂v + ∂w = 0
∂x
∂y
∂z
ou em anotação vectorial:
∇ . v = 0 (div v = 0)
onde ∇ = ∂ î + ∂ ^j + ∂ ^k se chama operador Nabla.
∂x ∂y
∂z
e onde v = u î + v^j + w^k
A equação div v = 0 é a equação da continuidade ou de conservação de massa, para um
fluido incompressível e homogéneo.
Apesar de se assumir que a densidade é cte no oceano, não é totalmente correcta, mas é
suficientemente verdadeiro para a resolução da maioria dos problemas em que seja
necessário considerar a equação da continuidade.
A obtenção da equação da conservação de sal é similar ao caso da conservação de
massa (equação da continuidade).
A salinidade é um número adimensional. Assim, o produto Sρ
ρ vem em unidade de
massa por unidades de volume, que é o que é necessário para esta dedução.
Por analogia com a equação da continuidade o escoamento de sal por dentro do cubo na
direcção x é: S1 ρ1 u1 ∆y ∆z e o escoamento para fora deste será: S2 ρ2 u2 ∆y ∆z.
Por argumentos idênticos aos da equação da continuidade, a variação da massa de sal
dentro do cubo elementar de controle resultante deste escoamentos (fluxos) será:
∂ (S ρ ∆x ∆y ∆z) = S1 ρ1 u1 ∆y ∆z – S2 ρ2 u2 ∆y ∆z
∂t
e
∂ (S ρ) = - ∂ (S ρ u)
∂t
∂x
28
29
juntando os outros dois componentes:
∂ (S ρ) = - ∂ (Sρ
ρu) - ∂ (Sρ
ρv) - ∂ (Sρ
ρw)
∂t
∂x
∂z
∂y
Se expandirmos esta equação temos:
S∂
∂ρ + ρ∂S = - ρ (u ∂S + v ∂S + w ∂S) - Sρ
ρ(∂
∂u + ∂v + ∂w) – S (u ∂ρ + v ∂ρ + w ∂ρ)
∂t
∂t
∂x
∂y
∂z
∂x ∂y ∂z
∂x
∂y
∂z
assumindo os fluídos incompressíveis (ρ = cte) e homogéneos, e lembrando a equação
da continuidade:
∂S = - u ∂S – v ∂S – w ∂S
∂t
∂x
∂y
∂z
∂S = - (v . ∇) S
ou
∂S = - v . grad S
∂t
∂t
que representam a equação de conservação do Sal S
ou :
Exemplo de aplicação da equação da continuidade
Vamos considerar a determinação das velocidades verticais no oceano aberto. Estas são
difíceis de medir directamente porque são muito pequenas comparadas com u e u, mas
por vezes são muito importantes. (por exemplo nas regiões costeiras → exemplo da
cinemática de um estuário).
Podemos estimar w com a ajuda da equação da continuidade e de valores medidos de u
e v, fáceis de medir directamente porque são maiores.
Difusão Molecular e Turbulenta. Difusão Dupla.
Assumimos atrás que a variação na distribuição das propriedades termodinâmicas
ocorre apenas por advecção. Contudo a experiência mostra que há propriedades que
podem variar, sendo transferidos de um local para outro, na ausência de advecção de
massa, e que esta transferência pode ocorrer numa variedade de escalas, desde a escala
molecular até à larga escala. Recentemente tem-se tornado claro que os vórtices de
mesoescala – mesoescale eddies – têm um papel importante na redistribuição de calor e
sal. Eddies contendo água distinta da do meio têm sido encontrados em muitas partes do
oceano. Um exemplo são os eddies contendo água do Mediterrâneo – meddies – que
têm sido observados são só perto do estreito de Gibraltar e na região das Canárias, mas
também em regiões afastadas como as Bahamas. A descoberta destes eddies de
mesoescala traz novas ideias sobre processos de mistura de águas oceânicas, numa
escala larga. Contudo, existem processos de mistura de muito pequena escala que são
relativamente bem conhecidas.
Difusão Molecular:
Se uma camada de água doce estiver sobre uma camada de água salgada e a água estiver
completamente parada, imóvel, apesar de não haver movimento perceptível o sal irá
gradualmente difundir-se para cima na água doce. Após um longo período, o sal estará
completamente difundido e teremos uma salinidade uniforme.
29
30
Água doce
Difusão
de sal
Água salgada
Se uma camada de água quente estiver sobre uma camada fria, com um gradiente de
temperatura muito acentuado entre as duas apesar de não haver movimento perceptível,
o gradiente de temperatura irá enfraquecer e ocorrerá difusão de calor da camada
superior para a inferior. Após algum tempo, o gradiente vertical de temperatura
desaparecerá.
Água quente
Difusão
de calor
Água fria
O calor e o sal são transportados por processos moleculares, chamada difusão
molecular.
Mesmo que o fluido esteja em repouso, as moléculas não estão, e a difusão dá-se ao
nível molecular. O fluxo molecular de calor e de sal é proporcional ao gradiente da
propriedade: quanto maior o gradiente maior a difusão (a transferência da propriedade).
As ctes de proporcionalidade são razoavelmente conhecidas e atendendo aos gradientes
de salinidade e temperatura observadas normalmente no oceano, é fácil mostrar que a
mistura que ocorre por procuras ao nível molecular é pequeno e muito menor do que a
observada no oceano (a maior mistura ocorre por processos turbulentos, como veremos
adiante).
Difusão Dupla:
A difusão molecular de calor é cerca de 100x maior que a difusão molecular de sal.
Suponhamos que temos uma camada de água quente e salgada sobre outra fria e menos
salgada, de tal forma que a camada superior tenha a mesma densidade ou menor
densidade que a camada inferior. A água mais salgada vai perder calor para a água mais
fria, mais depressa do que perde sal.
Se a diferença de densidades for pequena, a água mais salgada torna-se mais pesada que
água mais fria e menos salgada da camada abaixo, e começa a afundar-se nesta camada.
Da mesma forma a água fria da camada inferior ganha calor mais depressa do que ganha
sal e torna-se suficientemente leve para subir na camada superior – difusão dupla ou
double diffusion.
Os movimentos de subida e descida ocorrem sob a forma de pequenas colunas de água e
o fenómeno é conhecido como dedos de sal ou salt fingering.
Este fenómeno verifica-se por exemplo, na interface inferior da água mediterrânea que
sai pelo estreito de Gibraltar.
Água + salgada e quente
Água + doce e fria
Dedos de sal
30
31
Uma vez iniciado este processo, ele pode tornar-se dinamicamente instável e dar origem
a movimentos turbulentos de pequena escala, bem mais complexos.
No caso inverso (água fria e menos salgada sobre água quente e salgada) observa-se o
layering. Camadas relativamente homogéneas separadas por regiões estreitas de fortes
gradientes de temperatura e salinidade (há evidência de ocorrer, por exemplo, no oceano
Ártico)
Difusão Turbulenta:
A ocorrência de mistura de águas com diferentes temperaturas e salinidades, sem que
ocorra advecção é possível através de processos turbulentos.
Se tivermos duas camadas de água com diferentes temperaturas e salinidades dentro de
um recipiente fechado e se as misturarmos com um batedor de claras, pouco depois a
temperatura e a salinidade será uniforme e não houve advecção.
As propriedades termodinâmicas variaram sem haver a existência de advecção –
turbulência.
Os vórtices turbulentos – turbulent eddies no oceano podem ter escalas que vão da
dezena de centímetros à dezena de quilómetros.
7 – CARACTERIZAÇÃO E MISTURA DE MASSAS DE ÁGUA –
ANÁLISE TERMOHALINA:
A temperatura e a salinidade podem ser consideradas como propriedades conservativas
abaixo dos ≈ 100m de profundidade. Até aí sofrem muito a interacção com a atmosfera.
A precipitação, a evaporação, radiação solar e o vento não podem modificar muito a
salinidade abaixo dos ≈ 100m.
Então o que é que aí vai fazer modificar a salinidade?
É a mistura de massas de água. E é através das características T-S que se pode seguir
uma massa de água.
As características T-S das águas profundas são adquiridas à superfície em zonas
delimitadas do oceano por interacção com a atmosfera. Perdido o contacto directo com
esta, as águas só variam as suas características T-S por difusão (molecular ou
turbulenta), variando portanto gradualmente.
Podemos fazer perfis de T e de S com a profundidade, mas é difícil conjugar os 2.
Para identificar a massa de água (ou massas de água) presentes num dado ponto do
oceano, marcam-se num gráfico com a temperatura na coordenada vertical e a
salinidade na horizontal, um conjunto de observações da temperatura e da salinidade a
profundidades sucessivas num ponto do oceano, e unem-se os pontos. O resultado é um
diagrama temperatura – salinidade T-S.
Se a água for completamente homogénea, será representada por um único ponto no
diagrama T-S e chamamos-lhe uma água tipo.
Observações pouco dispersas em torno de um ponto, indicam a presença de uma água
tipo.
A mistura de 2 águas tipo forma uma massa de água, que será representada num
diagrama T-S por um segmento de recta (ou muito aproximadamente).
31
32
T
T
← Água tipo
B
B
← massa de água
← Água tipo
A
A
S
S
Vejamos agora algumas noções elementares sobre a mistura de águas tipo e a
consequente formação de massas de água.
Comecemos pela mistura de 2 águas tipo caracterizadas por (TA, SA) e (TB, SB) que se
misturam nas proporções PA e PB (PA, PB são percentagens referidas à unidade). Por
unidade de massa de mistura temos:
PA + PB = 1
Desprezando as variações do calor específico da água (estamos a cometer um erro
inferior a 1%), podemos escrever (conservação de calor):
PA TA + PB TB = T
Em que T é a temperatura de mistura.
A conservação de sal traduz-se por:
PA SA + PB SB = S
Em que S é a salinidade da mistura.
Podemos ainda escrever que:
PA TA + PB TB = T (PA + PB)
Logo como PA + PB = 1, irá ficar:
PA (TA – T) = PB (T -TB )
Donde :
TA – T = PB
T – TB PA
e
T - TA = - PB
T – TB
PA
Por raciocínio semelhante com a variável salinidade. Ficará:
S - SA = - PB
S – SB
PA
Então:
S - SA = T - TA
S – SB T – TB
Logo, o ponto representativo de mistura, caracterizado por T e S, encontra-se sobre a
recta que une os pontos representativos das 2 águas tipo no diagrama T-S.
32
33
T
B (TB, SB)
← M (T, S)
A (TA, SA)
S
Além disso:
AM = PB
BM PA
sendo AM e BM as distâncias de A a M e de B a M, respectivamente.
E então:
AM = BM = AB
PB
PA
Logo:
BM representa a proporção da água tipo A na mistura.
AB
AM representa a proporção da água tipo B na mistura.
AB
Graficamente iremos ter:
T
BM
B (TB, SB)
AM
← M (T, S)
A (TA, SA)
S
Percentagem de A :
BM x 100%
AB
EXEMPLO:
Se a água tipo A, com uma temperatura de 5º C e uma salinidade 35, 5 s.p.u. se mistura
com a água tipo B, com uma temperatura 2ºC e uma salinidade de 34,5 s.p.u. para dar
uma mistura de características T e S de 3ºC e 34,85 s.p.u., quais são as proporções de
água tipo A e tipo B na mistura? Cerca de 67% da B e 33% da A.
A figura seguinte mostra o exemplo com várias fases da mistura de 2 águas:
33
34
0
10
500
20
Temp (ºC)
água 1
1000
Curva a
Curva b
Curva c
2000
água 2
3000
Prof (m)
salinidade
salinidade
salinidade
Proporção de água 2
aos 1000m
água 1
água 1
1000m
(T1, S1)
(0 – 1500m)
1500m
temperatura
água 2
(T2, S2)
(1500 – 3000m)
Proporção da
água 1 aos
1000m
água 1
1000m
1500m
2000m
2000m
água 2
água 2
Curva a
Curva b
Curva c
Não há mistura
Há pouca mistura
Há bastante mistura
Apesar dos diagramas T-S poderem ser utilizados para inferir a temperatura e a
salinidade resultante da mistura de 2 águas, a aplicação habitual é para determinar as
proporções das diferentes águas já conhecidas que contribuem para a água quer estamos
interessados em estudar e da qual conhecemos a temperatura e a salinidade (através de
observações.
Notemos que nem todos os segmentos de recta nos diagramas T-S representam mistura
entre águas tipo: podem indicar variações dentro da mesma água. Estas variações
podem resultar de águas com características T-S ligeiramente diferentes formadas em
diferentes épocas do ano e que, de acordo com as suas densidades, se afundam para
profundidades diferentes. Ou, em alternativa, as condições à superfície podem variar na
região de origem da água durante o período de formação da água (em geral o Inverno).
A água que se vai misturando em profundidade ao longo das superfícies isopícnicas
inclinadas torna-se eventualmente estratificado na vertical e esta água será representada
por uma linha mais ou menos recta num diagrama T-S. A taxa a que a água se afunda é
muito pequena. Pode demorar anos a chegar aos 500-1000m de profundidade
O processo de mistura de massas de água torna-se mais complexo quando se misturam 3
tipos de água.
34
35
Os vértices do triângulo representam as águas tipo e o ponto representativo da mistura
tem que cair dentro do triângulo, achando-se as percentagens das diferentes
componentes medindo as distâncias desse ponto aos lados do triângulo:
B
TB
A1
M
C1
TM
TC
TA
C
A
B1
SA
PA = MA1
AA1
SM
PB = MB1
BB1
SB
PC = MC1
CC1
SC
PA + PB + PC = 1
Vimos como é possível calcular as proporções relativas das diferentes águas tipo na
mistura de água, utilizando o diagrama T-S.
Vejamos agora como é que as distribuições de salinidade e temperatura variam à
medida que as 3 águas se misturam no oceano e quais as consequentes modificações no
diagrama T-S:
Ver o acetato
Como representativos da situação em 3 localizações diferentes, apesar de que do ponto
de vista de massas de água em movimento, eles correspondem a 3 diferentes momentos
no tempo.
Na fase 2, na camada intermédia, ainda há uma porção de água com a sua temperatura e
salinidade originais. É chamado água núcleo – core water e é representado por um
ângulo acentuado no diagrama T-S.
Na fase 3, depois de mais mistura, esse ângulo é atenuado.
35
36
Utilização dos Diagramas T-S:
Estabilidade:
A densidade da água do mar, ou a sua variante oceanográfica, sigma-T, é uma função
da temperatura e da salinidade. É por isso possível desenhar linhas de igual densidade
(isopícnicas) nos diagramas T-S, se assumirmos que a pressão é cte (em geral a pressão à
superfície – pressão atmosférica). Os valores de sigma-T são por isso calculados a partir
da temperatura in situ, salinidade in situ e pressão atmosférica. Contudo, ainda que
pouco, a água sofra alguma compressão sob o efeito da pressão. Assim, a temperatura
da água profunda sobe devido à compressão adiabática e a temperatura in situ é maior
que a temperatura que seria medida se a mesma água estivesse à superfície, à pressão
atmosférica. Então a temperatura in situ não é propriamente uma propriedade
conservativa, uma vez que varia com a pressão. Por outro lado, a temperatura potencial
θ, (a temperatura in situ corrigida da compressão adiabática) é uma propriedade
conservativa.
Em consequência, a análise da curva T-S de uma dada estação oceanográfica pode dar
indicações erradas sobre a estabilidade da coluna de água. Para que a coluna de água
seja estável é necessário que a densidade aumente em profundidade, logo a curva T-S
tem que ir cruzando as isopícnicas de forma crescente à medida que a profundidade vai
aumentando.
Se representarmos θ e S ( em vez de T e S) e as isopícnicas potenciais, sigma-θ em vez
de sigma-T, a análise da estabilidade é mais perfeita, porque estamos a corrigir o
resultado do efeito do aquecimento devido à compressão adiabática. Ainda assim
estamos a cometer algum erro, porque sigma-θ corresponde à densidade à pressão
atmosférica.
No entanto o erro é consideravelmente menor e cada vez mais as temperaturas são
registadas nas observações oceanográficas de profundidade em termos de temperatura
potencial θ. Contudo, para muitas aplicações, a temperatura in situ é adequada, e ambos
os diagramas, T-S e θ-S são amplamente utilizados.
A estabilidade é tanto maior quanto maior for o ângulo entre a curva θ-S.
Outra utilização dos diagramas T-S está no controlo de uma estação oceanográfica, pois
qualquer ponto que esteja muito fora da curva T-S da região em estudo está
provavelmente errado e deve ser rejeitado.
Também se utilizam os diagramas T-S para obter valores interpolados a partir de dados
observados.
Massas de Água do Oceano Mundial:
Centrais
100 – 900m
100 – 300m
Intermédias
600 – 800 até 1200m
Profundas e de fundo
Abaixo dos 1200m
Atlântico Norte
Pacífico Norte
Formam-se nas regiões de convergência
subtropical (≈40ºN e S)
Têm origem em mares limítrofes. (água
Mediterrâneo
mediterrânica)
Formam-se em latitudes elevadas de ambos
Atlântico:
hemisférios e depois circulam para o
Funda→H.Sul
hemisfério oposto. As águas de fundo estão
Profunda→H.Norte
por baixo das águas profundas.
36
37
Salinidade
mediterrânica)
Pacífico < Indico (influência Mar Vermelho) < Atlântico (influência
Mínimos de salinidade:
- Águas subárticas (atlântico, Pacífico);
- Águas subantárticas (Atlântico, Pacífico, Índico);
Máximo de salinidade:
- Água Mediterrânica;
- Água do Mar Vermelho;
DINÂMICA
8 – A EQUAÇÃO DO MOVIMENTO EM OCEANOGRAFIA
Escrever a equação do movimento corresponde a escrever a 2ª Lei de Newton (F = ma)
numa forma que possa ser aplicada à oceanografia.
Esta Lei diz-nos que como resultado de várias forças a actuar num corpo de massa m,
este corpo adquire uma aceleração, ou seja uma variação na sua velocidade, que é
proporcional à resultante das forças actuantes. A cte de proporcionalidade é a massa do
corpo.
A aceleração tem a direcção da resultante das forças actuantes.
Se F resultante = 0, logo a = 0 e não vai haver modificação do movimento, ou seja, o
movimento persiste tal como está mas não deixa de haver movimento.
Também se observarmos que a = 0, podemos concluir que F resultante = 0.
A conclusão de que não há forças a actuar é impossível à superfície da Terra, onde pelo
menos a força gravítica está a actuar.
Assim, se tivermos um movimento com v = cte, temos que concluir que é a resultante de
forças que é nula. Lembra que v = cte (a = 0) implica que o movimento seja rectilíneo
(se não há aceleração normal a actuar – aceleração centrífuga).
Em oceanografia é conveniente escrever a equação F = ma na forma: a = F / m, e
escreve-la em termos da unidade de massa.
Descriminando algumas forças que são já conhecidas, a 2ª Lei para o oceano será:
Aceleração = f. qravidade + f. pressão + f. Coriolis + outras forças
unidade de massa
ou, na forma analítica:
dv = g – 1 ∇P – 2 Ω ^ v + F
dt
ρ
Escrevendo esta equação nas suas 3 componentes, x, y e z, com x positivo para Este, y
para Norte e z para cima e a origem das coordenadas na superfície do mar:
du =
dt
dv =
37
- 1 ∂P + 2 Ω senφ
φ v – 2 Ω cosφ
φ w + Fx
ρ ∂x
- 1 ∂P - 2 Ω senφ
φu
+ Fy
38
dt
dw = -g
dt
ρ ∂y
- 1 ∂P + 2 Ω cosφ
φu
ρ ∂z
+ Fz
Tudo isto por unidade de massa.
Veremos em breve como chegamos a estas equações.
Estas equações, na forma vectorial, ou nas suas componentes, são chamadas as
equações do movimento em Oceanografia. Estão escritas para um referencial não
inercial, fixo à Terra.
Nestas equações, u, v e w são as componentes da velocidade da água e elas descrevem o
movimento do oceano e são elas que interessam ao oceanografo físico. E em conjunto
com a pressão P, constituem, em princípio, as 4 incógnitas na equação do movimento.
Como dispomos da equação da continuidade, temos 4 equações para 4 incógnitas.
Todas as outras grandezas são conhecidas (em princípio).
φ - latitude; Ω - velocidade angular da Terra, etc...
As outras forças (Fx, Fy e Fz) representam as forças de atrito e forças de maré.
Podemos também considerar a salinidade S, e a temperatura T e consequentemente ρ,
como incógnitas (apesar de poderem ser observadas) e aí temos que introduzir mais
equações no sistema: são as equações Termodinâmicas.
Obter soluções, resolver, as equações do movimento, corresponde e encontrar valores de
u, v e w em função de quantidades conhecidas.
O facto de assumirmos a equação da continuidade para um fluido incompressível (div v
= 0) elimina de imediato os efeitos acústicos da solução destas equações, uma vez que
as ondas acústicas baseiam-se no facto do meio ser compressível (compressão e
expansões do meio são a forma destas ondas se propagarem).
As equações do movimento têm que satisfazer determinadas condições para se
verificam (ou que supomos verificar-se), como por exemplo, a componente u ter que ser
zero junto a uma costa Norte – Sul, ou a componente tangencial da velocidade também
tem que ser nula ao longo de uma fronteira, etc...
As expressões da equação do movimento tornam-se complicadas quando começamos a
introduzir expressões para as forças de fricção, incluídas no termo F. Ainda mais difícil
se torna encontrar soluções para elas quando são incluídos termos com aceleração. Aí,
as equações tornam-se “não lineares”, ou seja, as nossas incógnitas aparecem
combinadas entre si (por exemplo u ∂v / ∂x ou v ∂u / ∂y), e muitas vezes estas equações
não têm solução.
Ou melhor, têm solução, mas não uma receita geral para a encontrar.
Muitas vezes recorre-se a ctes empíricas, aproximações ou resolvem-se por métodos
numéricos.
Termos da Equação do Movimento:
O Gradiente de Pressão: – 1 ∇P
ρ
Imaginemos um volume rectangular de fluido cujos lados são dx, dy e dz relativamente
a um sistema de referência fixo à Terra. A força que se exerce neste volume ao longo da
direcção x, devido à pressão hidroestática é:
38
39
z
∆z
P
P + dP
y
∆y
∆x
x
P dy dz î na face esquerda
- (P + dp) dy dz î na face direita
A força de pressão resultante será: - dP dy dz î ou : - dP dx dy dz î.
dx
(dx dy dz) representa a unidade de volume, logo a força por unidade de volume será:
- dP î
dx
e por unidade de massa será:
- 1 dP î
ρ dx
Para as outras direcções:
- 1 dP ^j
e
- 1 dP ^k
ρ dy
ρ dz
Logo, a força de pressão por unidade de massa será:
- 1 (∂
∂P î + ∂P ^j + ∂P ^k) = - 1 ∇P = ( - 1 grad P)
ρ ∂x
∂y
∂z
ρ
ρ
O sinal negativo (-) significa que se a pressão P, aumenta para a direita, a força da
pressão actua para a esquerda, etc...
O Termo de Coriolis:
Este termo aparece porque a Terra, e consequentemente um sistema de eixos fixos à
Terra, não é um referencial inercial. Ora, as observações que nós fazemos são
relativamente à Terra, em rotação.
A 1ª e a 2ª Leis de Newton são válidas quando a aceleração é medida relativamente a
um referencial inercial. Se fizéssemos observações relativamente a um sistema de
inércia (sem aceleração... fixo no espaço... sem rotação... etc) a equação do movimento
seria apenas:
dv = - 1 grad P + g fixo + F
dt
ρ
gfixo é a aceleração centrífuga não incluída (referencial fixo).
39
40
Temos por isso de realizar a transformação do sistema de eixos inercial fixo no espaço,
onde é válido o F = ma no nosso sistema de eixos, não inercial, em cte rotação com a
Terra.
Vejamos então que diferenças ocorrem quando escrevemos a aceleração num e noutro
referencial:
Consideremos um referencial R(î, ^j, ^k) fixo no espaço e um outro R’(î, ^j, ^k) que
roda relativamente a R.
R’(î, ^j, ^k) roda e por isso varia no tempo.
No instante t = 0, podemos escrever para uma qualquer propriedade vectorial A o
seguinte:
Ax î ’ + Ay ^j’ + Az ^k’ = Ax î + Ay ^j + Az ^k
No entanto:
dA = dAx î + dAy ^j + dAz ^k
dt R dt
dt
dt
Mas como î’, ^j’ e ^k’ são em função do tempo:
dA = dAx î’ + dî’ Ax + dAy ^j’ + d^j’ Ay + dAz ^k + d^k’ Az
dt R’ dt
dt
dt
dt
dt
dt
Temos que:
dî’ = Ω ^ î
dt
pois a variação de î’ é normal a î e a velocidade angular Ω.
Analogamente para ^j e ^k. Logo:
dA = dA + Ω ^A
dt R dt R’
Ou seja: a variação no tempo da mesma grandeza vectorial, A, difere quando observada
nos 2 referenciais de Ω ^A. Se A for o vector posição r:
dr
dt
= dr
R dt
+ Ω ^A
R’
ou seja: v R = v R’ + Ω ^ r
Logo a velocidade medida no referencial fixo não é a mesma da medida no referencial
móvel.
Notar contudo, que se multiplica internamente por v a equação, como (Ω
Ω ^ r) . v = 0
2
2
porque v é perpendicular a Ω ^ r, v R = v R’, logo o módulo do vector v não varia.
Quanto será dvR no referencial r?
dt
Voltando a equação:
dA = dA + Ω ^A
dt R dt R’
40
41
iremos ter:
dvR =
dt R
Se substituirmos vR pela equação:
dvR + Ω ^ vR
dt R’
v R = v R’ + Ω ^ r
Fica:
dvR = d (vR’ + Ω ^ r) + Ω ^ (vR’ + Ω ^ r)
dt R dt
R’
Mas:
d (vR’ + Ω ^ r) = dvR’ + dΩ
Ω ^ r + Ω ^ dr
dt
dt
dt
dt
como a velocidade angular da Terra é cte:
dΩ
Ω=0
dt
Logo:
d (vR’ + Ω ^ r) = dvR’ + Ω ^ vR’
dt
dt
Por sua vez:
Ω^r)
Ω ^ (vR’ + Ω ^ r ) = Ω ^ vR’ + Ω ^ (Ω
Substituindo podemos escrever:
d vR = d vR’ + 2 Ω ^ vR’ + Ω ^ (Ω
Ω^r)
dt R dt R’
Onde:
é a velocidade relativamente a eixos fixos no universo (referencial inercial);
vR
vR’
é a velocidade relativamente a um referencial que roda com a Terra (referencial
não inercial);
d vR
dt
d vR’
dt
r
é a aceleração relativamente ao referencial de inércia.
R
R’
é a aceleração relativa à Terra (medida num referencial não inercial que gira
com velocidade angular Ω).
é a distância vectorial do corpo em movimento até ao centro da Terra
2 Ω ^ vR’ é o termo de Coriolis: é interessante ver que este termo é perpendicular à
velocidade e, por isso, perpendicular ao deslocamento. Logo, a força
associada a esta aceleração não produz trabalho.
Ω ^ (Ω
Ω ^ r ) é o termo centrípeto (porque aponta para dentro)
rg é o raio de giração da aceleração centrifuga, Logo: Ω ^ r = Ω ^ rg
Desenvolvendo o produto externo:
41
42
Ω ^ (Ω
Ω ^ rg) = (Ω
Ω . rg) Ω - Ω 2 rg
Mas: (Ω
Ω . rg) Ω = 0, porque rg e Ω são perpendiculares.
Logo: Ω ^ (Ω
Ω ^ r) = - Ω 2 rg
Então temos que:
Relativamente a um referencial de inércia, com a origem no centro do Planeta, a
equação do movimento será:
dv = - 1 grad P + g fixo + F
dt
ρ
R
relativamente a um referencial não inercial, a rodar com a Terra, para um observador
neste referencial a equação do movimento será:
dv + 2 Ω ^ v + Ω ^ (Ω
Ω ^ r) = g fixo – 1 ∇P + F
dt
ρ
R’
dv = g fixo – 1 ∇P - 2 Ω ^ v - Ω ^ (Ω
Ω ^ r) + F
dt
ρ
R’
ou:
- 2 Ω ^ v termo de Coriolis
- Ω ^ (Ω
Ω ^ r) termo da aceleração centrifuga
e é esta a aceleração que nós vemos quando fazemos observações à superfície da Terra.
Todas estas equações estão por unidade de massa.
Chamamos forças aparentes ao termo de Coriolis e ao termo centrífugo. Assim
salvamos Newton ao fazer aparecer forças aparentes, pois se assim não fosse a equação
de Newton F = ma não se verificava neste referencial.
Gravitação e o Termo Centrípeto: a aceleração da gravidade g
Gravitação é o nome dado à força de atracção entre massas, expressa pela Lei de
Atracção Universal – Newton:
Fg = G M1 M2
r2
onde M1 e M2 são massas e r a distância entre os seus centros. G é cte da gravitação
universal.
A gravitação está representada pelo termo gf na equação do movimento.
Contudo, quando medindo a aceleração da gravidade a que estão sujeitos os corpos à
superfície da Terra, estamos também a incluir o Termo Centripeto (- Ω ^ (Ω
Ω ^ r)), pois
é difícil medi-los separadamente.
É pois desejável combinar os 2 termos:
Ω ^ r)
g = gf - Ω ^ (Ω
a que chamamos aceleração gravítica, o familiar g =9,8m/s2.
42
43
O valor da aceleração centrípeta representa no máximo 0,3% da aceleração da
gravidade.
À superfície da Terra, g depende apenas da posição geográfica:
- é máxima nos polos, onde a aceleração centrípeta é nula e o raio terrestre é
menor;
- é mínima no equador, onde a aceleração centrípeta é máxima e o raio terrestre é
maior.
Contudo, a variação de g entre o polo e o equador é apenas cerca de 5% e por isso
consideramos g = cte = 9,8 m/s2.
É a direcção de g que define o eixo dos z’s.
Ω
Ω ^ ( Ω ^r)
g = gf - Ω ^ (Ω
Ω ^ r)
gf
- Ω ^ ( Ω ^r)
φ
Análise do Termo de Coriolis:
Podemos escrever o Termo de Coriolis nas suas componentes:
Ω = Ω cos φ ^j + Ω sen φ ^k
v = u î + v ^j + w ^k
-2Ω^v=
2
î
0
u
^j
Ω cosφ
φ
v
^k
Ω senφ
φ
w
=
= - 2 (w Ω cosφ
φ - v Ω senφ
φ) î – 2 u Ω senφ
φ ^j + 2 u Ω cosφ
φ ^k
São estes os termos que constam da equação de movimento que já escrevemos.
Em geral o termo que contém w é desprezado porque este é muito pequeno (–2wΩ
Ωcosφ
φ)
Também a componente em z da aceleração de Coriolis costuma ser desprezada
(2uΩ
Ωcosφ
φ), porque é muito pequena quando comparada com os outros termos (não
esquecer que é na componente z que está g e em que o gradiente de pressão é muito
grande quando comparado com o gradiente de pressão segundo x e y). Também os
percursos de uma partícula de água ao longo da componente z são muito pequenas
quando comparadas com os percursos ao longo de x e de y. Logo, a aceleração de
Coriolis segundo z não tem efeito significativo.
Assim, apenas 2 termos de Coriolis são importantes, actuando segundo x e y.
A combinação destes termos constitui aceleração horizontal de Coriolis:
φ î – 2 Ω u senφ
φ ^j
Ac = 2 Ω v senφ
Ou, vectorialmente:
43
44
Ac = f vH ^ k
φ, chamado parâmetro de Coriolis.
Com vH = u î + v ^j e f = 2 Ω senφ
Notemos que ao fazer o produto externo de vH com k estamos a provocar uma rotação
de 90º em vH, para a direita no hemisfério Norte e para a esquerda no hemisfério Sul.
Ordens de grandeza:
Para uma corrente de 1 m/s (3,6 Km/h) que é um valor típico para as correntes
oceânicas:
- no polo (φ = 90º) → Ac = 1,5x10-4 m/s2;
- a φ = 45º → Ac = 1x10-4 m/s2;
- e no equador (φ = 0º) → Ac = 0.
Como se vê estas acelerações são pequenas o que confirma a validade de as
desprezarmos na componente vertical da equação do movimento.
Uma aceleração destas faz um corpo demorar 28 horas para variar a velocidade de 1m/s
a 10m/s (36km/h)
Nota acerca do sistema de coordenadas utilizado:
Até aqui temos escrito os nossos vectores num sistema de eixos ortogonal e cartesiano
com eixos rectos e perpendiculares entre si (z → para cima, x → para leste e y → para
norte).
Mas se considerarmos o movimento do oceano no planeta Terra, como um todo, este
sistema com os eixos rectos não é apropriado. Temos que usar um sistema de
coordenadas esféricas (aproximação do planeta a uma esfera).
No entanto, se a região que estamos a considerar não for grande, ou seja, para
fenómenos de escala relativamente pequeno (até ≈ 100km), podemos utilizar um plano
tangente ao geóide sem estar a cometer grandes erros. A estes plano chama-se f-plane e
podemos não considerar a variação latitudional do parâmetro f, atribuindo-lhe um valor
cte igual ao centro da região considerada (aproximação f-plane).
Para regiões grandes, onde φ (latitude) varia algumas dezenas de graus, a aproximação a
um plano tangente chama-se β-plane. Aqui, se usarmos a aproximação a um sistema de
eixos perpendicular tomemos a variação de f com a latitude como f = (f0 + βy) onde f0 é
o valor de f na latitude central da região e β = ∂f, a variação de f com a latitude.
∂y
Filtragem das Equações do Movimento:
As equações do movimento que escrevemos, ainda não incluem os termos de atrito, que
conjuntamente com os termos advectivos constituem os termos não lineares (porque as
velocidades aparecem ao quadrado ou como produtos das velocidades por derivadas de
velocidades).
Com a introdução destes termos, as equações do movimento tornam-se muito
complexas, quase impossíveis de resolver (a análise dos termos não lineares será feito
mais tarde).
Contudo, a partir de uma análise grosseira da importância de cada termo da equação, é
possível negligenciar inicialmente alguns dos termos, mantendo ainda assim a equação
com realismo suficiente para descrever alguns movimentos do oceano, ainda que de
forma aproximada. Mais tarde, podemos sempre re-introduzir alguns dos termos, para
44
45
obter descrições mais exactas, ou para situações mais específicas em que alguns dos
termos negligenciados adquirem importância relevante.
O que vamos fazer é utilizar o banco de dados da oceanografia descritiva para estimar o
valor dos vários termos e assim decidir quais são os mais importantes em situações
particulares.
Para já, vamos considerar o oceano interior, afastado das regiões de fortes correntes e
afastado da superfície onde os efeitos do atrito são importantes. Considerando estas
regiões mais tarde.
A escala horizontal da distância no oceano (típica das circulações à larga escala):
1000Km = 106m (largura do oceano Pacífico = 12000Km; do Atlântico = 6000Km).
Assim, L ≈106m
As velocidades horizontais típicas:
10 cm/s = 0,1 m/s.
Assim,
U ≈ 10-1 m/s.
A escala vertical do oceano é dada pela sua profundidade média que é na ordem de 10 3
m (4000m).
Assim,
H ≈ 103 m.
Tínhamos já obtido através da equação da continuidade, um valor típico para a
velocidade vertical no oceano:
∂w – (∂
∂u + ∂v) → em termos de magnitude : W = U
∂z ∂x ∂y
H L
Logo,
W = U . H ≈ 10 –1 . 10 3 ≈ 10 –4 m/s
L
10 6
Assim,
W ≈ 10 –4 m/s
Uma escala razoável para o tempo será de 10 dias (≈106s), um tempo razoável para
estabelecer regimes ou registar variações consistentes dos parâmetros físicos da água do
oceano. Variações de menos escala temporal são atribuídas a movimentos turbulentos.
Assim,
T ≈ 10 6s.
A escala do parâmetro de Coriolis pode ser dada pelo seu valor à latitude φ = 45º:
2 Ω sen 45º = 2 x 7,3x10-5 x 0,71 ≈ 10 –4 s-1
Assim,
f ≈ 10 –4 s-1
A escala da variação vertical da pressão obtém-se a partir da equação de equilíbrio
hidrostático, com:
1 ≈ 10-3 m3/kg e ∆P ≈ 104 kPa = 107 Pa para Z = -103 m
ρ
Assim,
∆Pv ≈ 107 Pa (escala vertical)
A escala da variação horizontal da pressão pode ser tomada como 104 Pa, se
considerarmos que é a variação espacial da pressão atmosférica a causa das variações
45
46
horizontais da pressão em profundidade. Ou seja, se assumirmos que as variações de
pressão na superfície se propagam em profundidade.
Sabendo que 1 atm ≈ 105 Pa ≈ 1000 mbares numa escala horizontal de ≈ 1000 km será
razoável admitir variações de pressão atmosférica de ≈ 104 Pa (100mbars).
∆PH ≈ 104 Pa (escala horizontal)
Assim,
Por fim, a escala da aceleração da gravidade: g ≈ 10 m/s2
Temos então para a equação horizontal do movimento:
du =
dt
dv =
dt
U
T
10-7
- 1 ∂P + 2 Ω senφ
φ v – 2 Ω cosφ
φw
ρ ∂x
- 1 ∂P - 2 Ω senφ
φu
ρ ∂y
∆PH
fU
fW
ρL
10-5
10-5
10-8
+ Fx
+ Fy
???
10-8
E para a equação vertical do movimento:
dw = -g
dt
W
T
10-10 10
- 1 ∂P + 2 Ω cosφ
φu
ρ ∂z
∆Pv
fU
ρH
10
10-5
+ Fz
???
10-11
Comentários :
-
-
confirmámos que os termos de Coriolis (– 2 Ω cosφ
φ w) e (2 Ω cosφ
φ u), são
realmente desprezáveis;
na equação vertical todos os termos são muito mais pequenos que a aceleração
da gravidade e o termo do gradiente de pressão, que representam a equação de
equilíbrio hidrostático. Verificámos que ela é correcta com uma precisão de 1
para 1 milhão! Verifiquemos que ela ainda é válida para as correntes mais
rápidas do planeta, tal como a corrente do golfo, com uma velocidade de 3 m/s e
uma largura de ≈ 100km.
Das equações horizontais verificamos que, com uma precisão de 1% os termos
de Coriolis e de gradiente de pressão se equilibram: é a aproximação geostrófica.
Assim temos que com uma precisão de 1% para o oceano interior (90% do oceano
mundial) são válidas as equações:
f u = - 1 ∂P
ρ ∂y
- f v = - 1 ∂P
ρ ∂x
g = - 1 ∂P
ρ ∂z
Estas equações descrevem as relações:
46
47
1. Entre a distribuição horizontal da pressão e a velocidade horizontal no oceano;
2. Entre a distribuição da pressão como função da profundidade e da distribuição de
unidades, que por sua vez é uma função da distribuição da salinidade, temperatura e
pressão.
Então, em princípio, se observarmos a distribuição da salinidade e da temperatura em
função da profundidade, podemos calcular a pressão P, a partir de Z (pela equação do
equilíbrio hidrostático) e substituir nas equações em x e y para calcular u e v
(oceanografia observacional).
Alternativamente podemos expressar as distribuições da temperatura e da salinidade
matematicamente como funções de x, y e z, introduzindo a equação de estado:
ρ = ρ (T, S, P)
a partir de estudos laboratoriais das propriedades da água do mar e equações de
conservação da energia interna e sal, e resolver as equações simultaneamente.
Aparentemente, a região interior do oceano pode ser descrita por um conjunto de
equações simples e que podem ser resolvidas, porque os efeitos não lineares foram
desprezados.
Contudo, este conjunto de equações não nos dá uma descrição completa, porque, esta
depende também das camadas superficiais onde o vento actua e do que se passa nas
fronteiras laterais, onde a dinâmica pode ser mais complicada (por exemplo a corrente
do Golfo).
No entanto, mesmo ignorando essas regiões, este conjunto de equações é muito útil para
descrever, ainda que de forma aproximada, o movimento do oceano.
9 – CORRENTES SEM ATRITO E SEM CURVATURA: O
ESCOAMENTO GEOSTRÓFICO.
Equilíbrio hidrostático:
Da filtragem da equação da componente vertical do movimento obtivemos que no
oceano é válida, em grande aproximação, a equação:
1 ∂P = - g
ρ ∂z
que é a equação hidrostática na sua forma diferencial, já nossa conhecida da mecânica
dos fluídos (dP = - ρ g dZ), que nos diz que a pressão a um dado nível é proporcional à
espessura da camada do oceano acima desse nível, desde que a densidade seja
considerada cte.
O sinal negativo deve-se ao facto de considerarmos o eixo dos z’s para cima. Por
exemplo, a diferença de precisão entre a superfície e 150m de profundidade será:
P150 = - (1,025x103 x 9,8 x –150) ≈ 1507x103 Pa ≈ 1507 KPa ≈15 atm
(1 atm ≈ 105 Pa)
Fazendo a densidade da água do mar: ρ = 1025x103 Kg/m3
Será esta a pressão que temos que adicionar à pressão atmosférica (P0) para sabermos a
pressão a 150m de profundidade?
Se o fluido estiver em repouso, u = 0, v = 0 e w = 0 e se o regime se mantiver
estacionário dv / dt = 0 (ou seja, se o oceano se mantiver em repouso desprezando as
outras forças – Fx, Fy e Fz) temos para as equações do movimento horizontal:
47
48
1 ∂P = 0
ρ ∂x
e
1 ∂P = 0
ρ ∂y
ou seja, as superfícies isobáricas são superfícies de nível horizontais.
Neste caso, não há força do gradiente de pressão para provocar movimento horizontal.
Escoamento Inercial:
Se assumirmos que ∂P / ∂x e ∂P / ∂y são nulos (ou seja, que a superfície do oceano é
uma superfície de nível e todas as superfícies isobáricas no interior do oceano são de
nível, ou seja, horizontais), que F, as outras forças não são importantes e que w = 0 (ou
seja, só há movimento horizontal no oceano), então as equações horizontais do
movimento são:
du = 2 Ω senφ
φv
dt
dv = - 2 Ω senφ
φu
dt
Estas equações têm as seguintes soluções:
com, (VH)2 = u2 + v2
φ t)
u= VH sen (2 Ω senφ
v = - VH cos (2 Ω senφ
φ t)
Notemos, que estas são equações que descrevem um movimento circular horizontal, no
sentido dos ponteiros do relógio, com uma velocidade linear cte, VH, e uma velocidade
angular 2 Ω senφ
φ = f.
Se o raio deste movimento circular for Ri, então a aceleração centrífuga será: (VH )2/ Ri
que deverá ser equilibrada pela aceleração de Coriolis 2 Ω senφ
φ VH.
2
Assim:
(VH) = 2 Ω senφ
φ VH
Ri
A esta trajectória circular chama-se círculo de inércia e a este movimento circular
movimento de inércia.
y
VH 2
Ri
f VH
VH = cte
x
VH = cte, por isso as 2 acelerações cancelam-se e aplica-se a 1ª Lei de Newton
Este tipo de movimento pode ser gerado quando o vento sopra de forma permanente
numa dada direcção, induzindo uma velocidade VH na água, e pára de soprar de forma
súbita e o movimento contínua, já sem o atrito do vento, como consequência do
momento adquirido anteriormente – movimento de inércia.
48
49
Este tipo de movimento pode ser gerado (e é na realidade!) quando o vento sopra de
forma permanente numa dada direcção, induzindo uma velocidade VH na água, e pàra
de soprar de forma súbita e o movimento continua, já sem o atrito do vento, como
consequência do momento adquirido anteriormente (daí chamar-se movimento de
inércia).
Variações de escoamento com período inercial são observadas muitas vezes sem registo
correntométricas.
φ VH
Temos a partir de:
(VH) 2 = 2 Ω senφ
Ri
Ri = VH
f
e o período inercial será dado (ω
ω = 2π
π / T) por:
Ti = 2π
π / velocidade angular do movimento = 2π
π / f = 12h / sen φ
pois, Ω = 2π
π / 24h que corresponde a metade de 1 dia pendular.
que o raio do movimento inercial será:
Dia pendular → é o tempo que o pêndulo de Foucoult leva a rodar o seu plano de
oscilação de 2π radianos – 24h / sen φ).
Ti é infinito no equador, 16,97 h a 45º de latitude e 11,97 h no pólo.
Uma partícula colocada em movimento com uma velocidade 0,5m/s a 42º de latitude
descreve um círculo de raio 5km num período de 18h.
A direcção de rotação é no sentido dos ponteiros do relógio (visto de cima) no
Hemisfério Norte, e no sentido contrário no Hemisfério Sul (ou seja, anticiclónico em
ambos os casos).
10 – CORRENTES SEM ATRITO E COM CURVATURA: CORRENTES
GEOSTRÓFICAS.
Geopotencial:
Consideremos a quantidade dW = M g dz, que é o trabalho realizado para levantar a
massa M de uma distância vertical dz, contra a força da gravidade (ignorando o atrito).
Este trabalho corresponde à energia potencial ganha pela massa M. Definindo
geopotencial φ, de tal forma que a variação do geopotencial dφ
φ, numa distância
vertical, dz, é dado por:
M g dz = dW = M dφ
φ
(em Joules)
Ou em energia por unidade de massa (J/kg = m2/s2):
dφ
φ = g dz
e pela equação do equilíbrio hidrostático:
dφ
φ = - 1 dP
ρ
a interpolação entre z1 e z2 dá:
nível 2
dφ
φ=
nível 1
49
Z1
Z2
P2
g dz = - 1 dP
ρ
P1
50
Se escrevermos ρ em 2 partes, a parte standart, com ρ a depender apenas da pressão,
mantendo a salinidade fixa a 35 e a temperatura a zero, e a anomalia δ que varia
também com a temperatura e a salinidade:
ρ = ρ (35,0,P) + δ
Podemos escrever:
φ 2 - φ 1 = g (z 2 – z 1) = nível 1
nível 2
1
ρ (35,0,P)
nível 2
dP nível 1
1 dP = -∆
∆φ S - ∆φ
δ
onde ∆φ S é a distância geopotencial standard e ∆φ é a anomalia geopotencial, função de
P, S e T. Esta é cerca de um milésimo da standard mas é muito importante.
A quantidade (φ
φ 2 - φ 1) é chamada distância geopotencial entre os níveis z1 e z2, onde
as pressões são P1 e P2 respectivamente.
Apesar de chamarmos distância no calão oceanográfico, tem unidades de energia por
unidades de massa (J/kg = m2/s2).
Para g = 9,8 m/s2 e dz = 1m → dφ
φ = 9,8 J/kg.
Por conveniência numérica, utiliza-se em oceanografia uma unidade geopotencial
chamada metro dinâmico, de tal forma que: 1dyn m = 10,0 J/kg.
Para indicar que esta unidade está a ser usada, usa-se o símbolo D para o geopotencial.
Assim a distância geopotencial D2 – D1 é quase numericamente igual a z2 – z1, em
média.
Por exemplo, a uma profundidade geométrica de z2 = - 100m, a distância geopotencial à
superfície será: φ 2 - φ 1 = - 980J/kg → D2 – D1 = -98 dyn m
Gradientes horizontais de Pressão e força do gradiente (horizontal) de Pressão:
Já vimos o que era o gradiente vertical da pressão (equação do equilíbrio hidrostático).
Nem sempre a superfície do oceano é uma superfície de nível, ou seja, de igual
geopotencial.
Se a superfície do oceano apresenta um declive a pressão hidrostática que actua nas
sucessivas superfícies horizontais em profundidade não será a mesma em toda a área de
cada uma dessas superfícies. Isto é: vão existir gradientes horizontais de pressão.
A água do oceano tenderá a escoar por forma a desfazer estas diferenças laterais de
pressão. A força que origina este movimento é a chamada força horizontal do gradiente
de pressão (provém do facto de ∂P / ∂x e ∂P / ∂y serem ≠s de 0).
P
0
Superfície isobárica
P0
B
Baixa
pressão
Alta
pressão
Superfície de igual
geopotencial
Força do gradiente de
pressão – ajuste geostrófico
A
Superfície de nível
PA = -ρ
ρg z
∆x
PB = -ρ
ρg (z +∆
∆z)
50
51
As superfícies definidas como horizontais ou de nível são superfície de igual
geopotencial, ou seja, superfícies perpendiculares à aceleração da gravidade.
Num fluido em repouso, as superfícies isobáricas são superfícies de nível.
Suponhamos contudo que temos água a densidade cte, ρ, cuja superfície (que é uma
superfície isobárica) apresenta um declive (isto pode ocorrer devido à acção do vento,
presença de correntes, etc. ...).
Olhando à figura acima representada, a pressão em profundidade em A é dada pela
equação do equilíbrio hidrostático: PA = -ρ
ρg z
E em B: PB = -ρ
ρg (z +∆
∆z)
A diferença entre as pressões nas 2 distintas regiões: ∆P = PB – PA = -ρ
ρg ∆ z
Sendo a distância entre A e B, ∆x, o gradiente horizontal de pressão será:
∆P = -ρ
ρg ∆ z
∆x
∆x
mas, ∆z = tan θ
∆x
Logo:
∆P = -ρ
ρg tan θ
∆x
∂P = -ρ
ρg tan θ
∂x
Este é o valor do gradiente de pressão na direcção x, que mais não é que uma força por
unidade de volume, que resulta da existência de um gradiente de pressão ao longo de x
(repare-se que as dimensões de ∂P / ∂x são N /m3).
Esta força do gradiente horizontal de pressão é negativa, isto é, opõe-se ao gradiente de
pressão, tentando contrariar ou cancelar esse gradiente.
Para obter a força do gradiente de pressão por unidade de massa, para estar em
conformidade com a equação do movimento que escrevemos, temos que dividir pela
densidade, ρ. Logo:
1 ∂P = - g tan θ
ρ ∂x
e esta é a força horizontal do gradiente de pressão por unidade de massa.
Reparemos que esta grandeza, 1 ∂P ou 1 ∂P , são termos da equação do movimento do
ρ ∂x
ρ ∂y
oceano, que havíamos escrito antes. Se no oceano não actuasse mais nenhuma força
horizontal, a equação acima diz-nos que o oceano escoaria das altas para as baixas
pressões, sob a acção de uma força por unidade de massa proporcional à tangente do
declive (g tanθ
θ).
ou, na forma diferencial:
A Equação Geostrófica:
No entanto actuam outras forças horizontais.
Na filtragem das equações do movimento vimos que tão importante como a força
horizontal do gradiente de pressão é a força de Coriolis. Quando estas 2 forças se
equilibram temos a aproximação geostrófica:
- f v = - 1 ∂P
ρ ∂x
51
52
ou:
2 Ω senφ
φ v = g tan θ
que é uma versão da equação geostrófica. O escoamento que resulta desta aproximação
é o escoamento geostrófico ou corrente geostrófica e a sua velocidade, v, a velocidade
geostrófica.
Reparemos que v é segundo y e é positivo, ou seja é perpendicular a ∂P / ∂x, deixando
os valores mais altos de P (altas pressões) à direita. Reparemos também que a
velocidade geostrófica é tanto maior quanto maior for o declive da superfície livre do
oceano (maior será a tan θ).
Situação inicial → há movimento acelerado, descendo ao longo do gradiente de
pressão.
Situação de equilíbrio geostrófico → a força do gradiente de pressão e a força de
Coriolis cancelam-se, logo o movimento tem velocidade cte – velocidade geostrófica
(Lei da Inércia).
Força do
gradiente de
pressão
Força de Situação de
Coriolis equilíbrio
Força de
Coriolis
Força do
gradiente de
pressão
Situação
inicial
Sobre a equação geostrófica:
Em princípio a equação geostrófica irá permitir-nos determinar a velocidade geostrófica
(uma boa aproximação da velocidade real em muitas circunstâncias), medindo apenas o
declive, θ, da superfície isobárica. Na prática, a medição da pressão P, para definir a
superfície isobárica, não pode ser feita directamente com a precisão necessária (declives
muito pequenos, na ordem de 1m em 100 km). Utiliza-se então a equação hidrostática
(P = ∫ρgdz) para determinar P a partir da medição da distribuição da densidade, ρ, em
profundidade (que por sua vez se determina a partir de T e de S).
Mesmo com este método não conseguimos determinar com rigor θ, ou seja, determinar
o seu valor absoluto. E isto porque nós fazemos as nossas medições de um barco e não
sabemos se a superfície do mar é ou não uma superfície de nível. De facto, se existirem
correntes á superfície do mar não será de nível (geopotencial ≠ cte), porque nesse caso
existindo velocidade há força de Coriolis e tem que existir um declive da superfície do
oceano para gerar uma força horizontal de gradiente de pressão para balancear a força
de Coriolis, à luz da equação geostrófica.
Como veremos, o melhor que vamos conseguir é calcular as diferenças entre o declive,
θ1, a um nível z1 e o declive θ2, a um nível z2 e calcular a velocidade geostrófica no
nível z1, relativamente à velocidade no nível z2.
Mas o cálculo destas diferenças é importante e, se assumirmos determinadas condições,
podemos mesmo inferir com uma boa aproximação, as velocidades geostróficas
absolutas. Isto torna-se importante porque a medição directa das correntes oceânicas e
52
53
quantidade suficiente para definir campos de velocidades é tecnicamente quase
impossível e muito dispendioso.
Ter um navio ancorado a medir constantemente a velocidade da corrente, durante um
ciclo sazonal, é caro e só temos informação num ponto. Um navio também não está em
repouso relativamente à Terra.
A colocação de amarrações de fundo, em vários pontos, podem dar uma boa descrição
tridimensional mas são caras, sujeitas a acidentes com navios de pesca e outros, e de
difícil operação por longos períodos.
O método geostrófico para cálculo das correntes, requer informação sobre a distribuição
de densidade no oceano. Esta pode ser obtida por medições de salinidade e temperatura
(e pressão), que são muito mais fáceis de realizar do que medir as correntes
directamente.
No entanto, as velocidades geostróficas são apenas uma aproximação e devem ser
utilizados com inteligência e em conjunto com outra informação (da temperatura de
superfície do oceano, via satélite). A maior parte dos conhecimentos que temos do
oceano têm sido obtidos por este processo.
53