gbk robotics
Av. Henrique Eroles, 584 Mogi das Cruzes, Sao Paulo 08730-590
Phone: 11 2378-6222 E-Mail: [email protected]
gbk
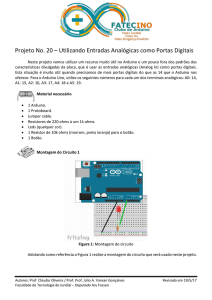
P6 – Modulo Driver de Motor de Passo Unipolar com ULN2003
O Módulo Driver integra o CI ULN2003, que é composto por sete transistor Darlingtons, e ainda possui 4 LEDs
para indicar as bobinas (fases) acionadas e 4 pinos, um para o acionamento de cada bobina (fase).
Especificacoes
Tensão de operação do Módulo: 3 ~ 5.5V;
Tensão de operação do motor de passo suportado pelo Módulo: 5 ~ 12V;
O Módulo suporta até 500 mA por canal e tem uma queda de tensão interna de cerca de 1V quando ligado. Ele
também contém diodos de fixação internos para dissipar picos de tensão durante a condução de cargas indutivas;
Temperatura de funcionamento do Módulo: -25 ºC ~ 90 ºC.
Dimensoes:
Largura: 37mm
Comprimento: 39,5mm
Peso: 13grms
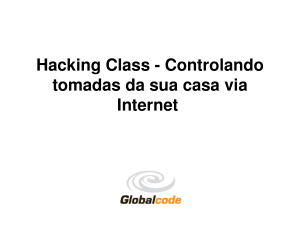
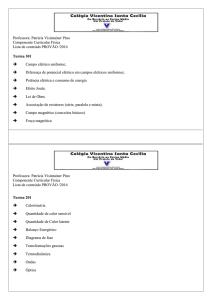
Exemplo de ligacao
Conexões: O módulo pode ser conectado ao Arduino ligando-se o pino positivo (VCC) no 5V, o pino negativo (GND) no GND e o
pinos de acionamento aos respecitivos pinos no Arduino. Exemplo:
Pin8, ao pino numero 8 do Arduino;
Pin9, ao pino numero 8 do Arduino;
Pin10, ao pino numero 8 do Arduino;
Pin11, ao pino numero 8 do Arduino;
Para ligar o motor de passo ao modulo, temos primeiro que identificar as bobinas do
motor.
Depois de identificar as bobinas conectar as bobinas nas saidas do modulo.
gbk robotics
Av. Henrique Eroles, 584 Mogi das Cruzes, Sao Paulo 08730-590
Phone: 11 2378-6222 E-Mail: [email protected]
Sketch de exemplo
/*
Exemplo de Ligacao
-------------------Arduino
Modulo
-------------------GND
VCC
PINO
PINO
PINO
PINO
GND
VCC
08
09
10
11
08
09
10
11
*/
int
int
int
int
motorPin1
motorPin2
motorPin3
motorPin4
=
=
=
=
8;
9;
10;
11;
int delayTime = 100;
void setup() {
pinMode(motorPin1,
pinMode(motorPin2,
pinMode(motorPin3,
pinMode(motorPin4,
}
OUTPUT);
OUTPUT);
OUTPUT);
OUTPUT);
void loop() {
digitalWrite(motorPin1,
digitalWrite(motorPin2,
digitalWrite(motorPin3,
digitalWrite(motorPin4,
delay(delayTime);
digitalWrite(motorPin1,
digitalWrite(motorPin2,
digitalWrite(motorPin3,
digitalWrite(motorPin4,
delay(delayTime);
digitalWrite(motorPin1,
digitalWrite(motorPin2,
digitalWrite(motorPin3,
digitalWrite(motorPin4,
delay(delayTime);
digitalWrite(motorPin1,
digitalWrite(motorPin2,
digitalWrite(motorPin3,
digitalWrite(motorPin4,
delay(delayTime);
}
HIGH);
LOW);
LOW);
LOW);
LOW);
HIGH);
LOW);
LOW);
LOW);
LOW);
HIGH);
LOW);
LOW);
LOW);
LOW);
HIGH);
gbk