BANCO DE QUESTÕES‐UNIP‐ professor Alberto Vieira Jr. 01‐MÓDULO DE APRESENTAÇÃO DISCIPLINA: Dinâmica dos Sistemas
CARGA HORÁRIA SEMESTRAL : 66 horas
I – EMENTA
Estudo dos mecanismos, seus movimentos e esforços na transmissão de movimentos.
II - OBJETIVOS GERAIS
Estudar os mecanismos; as funções de posição de suas partes; as forças de inércia que atuam
durante o movimento e os esforços que atuam nos componentes do mecanismo, quando
existem restrições externas.
III - OBJETIVOS ESPECÍFICOS
Estudo de mecanismos epicicloidais. Estudar o mecanismo biela-manivela com relação ao seu
funcionamento e esforços atuantes. Estudo do dimensionamento de volantes e rotores. Estudo
dos mecanismos de quatro barras. Balanceamento de máquinas rotativas.
IV - CONTEÚDO PROGRAMÁTICO
Introdução aos mecanismos. Sistemas epicicloidais: cilíndricos e cônicos, seus movimentos e
esforços, estudo do diferencial de veículos. O mecanismo Biela-Manivela e suas variações:
estudo dos movimentos, transmissão de esforços e forças de inércia. Rotores e Volantes para
regularização de torques, forças e dimensionamento. Balanceamento de rotores. Mecanismos
de quatro barras: funcionamento, forças de inércia.
V -ESTRATÉGIA DE TRABALHO
Aulas expositivas com recursos audiovisuais.
VI - AVALIAÇÃO
De acordo com o regimento.
VII – BIBLIOGRAFIA
Bibliografia Básica
Mabie, Hamilton H. Mechanisms and dynamic analysis of machinery”, John Wiley, New York,
2005;
Kraige, L.G. Meriam, J.L. Mecânica: Dinâmica. Rio de Janeiro: LTC, 2004.
1 Vieira Jr, Alberto, Elementos de máquinas, OPUS, São Bernardo do Campo, SP, 2009.
Vieira Jr, Alberto, Engrenagens, OPUS, São Bernardo do Campo, SP, 2009.
Hibbeler, R. C. Dinâmica: mecânica para engenharia. 8ª ed. Rio de Janeiro: Prentice Hall Brasil,
2004.
Bibliografia Complementar
Franca, L.N.F.;Matsumura, A.Z. Mecânica geral. Edgar Blucher,2005
Gere, J. Mecânica dos materiais. São Paulo: Pioneira Thomson Learning, 2003.
Kaminski, P. C. Mecânica geral para engenheiros. Edgar Blucher, 2000.
Merian, J. L., Kraige, L. G. Estática. 4ª ed. Rio de Janeiro: LTC, 1999.
Shigley, J.E. Dinâmica das máquinas. EDUSP
MÓDULO 1 ‐ Introdução aos mecanismo epicicloidais cilíndricos e seus movimentos. Um trem de engrenagens é uma combinação de rodas dentadas, cujo engrenamento se dá pela
ação dos dentes sucessivamente em contato. As engrenagens de um trem podem ter eixos
paralelos, concorrentes ou dispostos de forma qualquer. Quando os eixos são fixos, temos os
sistemas básicos, conforme estudo feito em Projeto de Elementos de Máquinas.
Estudaremos neste e nos demais módulos sistemas cujos eixos são móveis, isto é além da
rotação possuem também translação, são os chamados sistemas epicicloidais. Com o auxílio
desses mecanismos, com um pequenos número de rodas dentadas ou não, é possível obter
grandes relações de transmissão. Os sistemas epicicloidais ou planetários, são utilizados
largamente onde há necessidade de transmitir grandes esforços, como veículos automobilísticos
e ferroviários, em comandos de aviões e em numerosos tipos de robôs industriais. Neste caso,
não valem as relações de transmissão vistas para sistemas básicos, pois deve ser levada em
conta a velocidade de arrastamento do satélite.
Iniciaremos este tópico, definindo os principais elementos:
SATÉLITE é o elemento, sobre o eixo móvel, apresentando translação e rotação.
PLANETÁRIA é o elemento em contato direto (engrenada no caso de roda dentada) com a
satélite.
BRAÇO OU PORTA-SATÉLITE é a peça que arrasta, ou é arrastada pelo eixo móvel, ou pela
satélite
CAMINHO é o percurso de engrenamento, iniciando sempre na primeira planetária e
terminando na última.
Exemplo 1.
Como exemplo, veja o caso de um rolamento rígido de esferas SKF 6322. Ele está fixado a um
eixo girante de diâmetro 110 mm e a um mancal estacionário, evitando translação e permitindo
a rotação do eixo de 1200 rpm, com o mínimo de atrito (atrito de rolamento, visto em Projeto
2 de Elementos de Máquinas). Identificar os principais elementos, para esse rolamento que
apresenta:
(A) Anel interno de diâmetro interno 110 mm e externo de 150 mm
(B) Anel externo de diâmetro interno 200 mm e externo de 240 mm
(C) Gaiola de aço estampado
(D) Esferas de aço
Solução:
SATÉLITE é o elemento D. As esferas giram e transladam, devido à diferença de velocidades
entre os dois anéis (nA = 1200 rpm e nB = 0)
PLANETÁRIA são os elementos A e B, em contato direto com a satélite.
BRAÇO OU PORTA-SATÉLITE é o elemento C, que arrasta as esferas e impede o contato entre
elas.
CAMINHO é o percurso A-D-B ou o caminho B-D-A, considerando como primeira planetária o
elemento A ou o elemento B, respectivamente.
Exemplo 2.
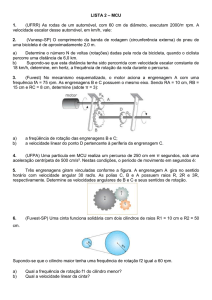
A caixa C é giratória onde 4 e 7 são rodas com dentes internos. Classifique os elementos do
mecanismo epicicloidal e determine o valor do diâmetro d6
elemento
diâmetro primitivo (mm)
2
50
3
150
4 A 4
250
5
180
6
d6
7
280
7
2
6 B 5
3
C
Solução:
Inicialmente devemos verificar se há algum eixo móvel, pois em caso contrário não teremos
sistema epicicloidal. O único eixo móvel é a peça em L, indicada no desenho pela letra B, logo o
elemento que gira e translada preso ao eixo móvel B é a roda 6 (SATÉLITE)
Os elementos engrenados com a satélite 6, são as rodas 5 e 7, portanto as planetárias são as
rodas 5 e 7
A peça em L, ou seja o eixo 6, que arrasta a satélie é o porta-satélite ou braço 6
Os demais elementos não fazem parte do sistema epicicloidal e constituem portanto um sistema
básico.
Pelo desenho, vemos que d7 = 2 d6 + d5 resultando d6 = 50 mm
3 QUESTÕES. Classificar todos os elementos dos exercícios de Vieira Jr, Alberto, Elementos de
máquinas, OPUS, São Bernardo do Campo, SP, 2009, indicados a seguir:
1)
2)
3)
4)
5)
6)
Exercício
Exercício
Exercício
Exercício
Exercício
Exercício
3.6
3.7
3.8
3.9 com a trava acionada
3.9 com a trava recuada
3.11
Bibliografia
Mabie, Hamilton H. Mechanisms and dynamic analysis of machinery”, John Wiley, New York,
2005;
Vieira Jr, Alberto, Elementos de máquinas, OPUS, São Bernardo do Campo, SP, 2009.
Vieira Jr, Alberto, Engrenagens, OPUS, São Bernardo do Campo, SP, 2009.
4 MÓDULO 2 - Estudo de mecanismo epicicloidais cilíndricos e seus movimentos. FÓRMULA DE
WILLIS Para determinar as velocidades angulares de cada elemento do sistema epicicloidal podemos
utilizar os conceitos de centro instantâneo de rotações, ou o método tabular que veremos a
seguir.
MÉTODO TABULAR : como há superposição de efeitos nas velocidades de arrastamento,
relativa e absoluta, construímos uma tabela, considerando cada uma delas agindo
separadamente e em seguida, fazemos a adição da velocidade de arrastamento e relativa,
resultando a absoluta. Construímos inicialmente uma tabela segundo o caminho escolhido
conforme o exemplo anterior A-D-B e por última coluna o braço C (na primeira linha).
Na segunda linha (arrastamento), consideramos que todos os elementos sejam arrastados pelo
braço C e tenham portanto a rotação nC
Na quarta linha (absoluta), indicamos a rotação de cada elemento com o seu respectivo índice.
Na terceira linha (relativa), consideramos o braço parado e indicamos a rotação relativa =
rotação absoluta – rotação de arrastamento) precedida de um sinal, que é + se o par de
elementos considerados, girarem no mesmo sentido e – se os elementos do par considerado
girarem em sentidos opostos.
Rotação
Planetária A
Satélite D
Planetária B
Arrastamento
Relativa
Absoluta
nC
(nA-nc)
nA
nC
(-dA/dD)(nA-nc)
nD
nC
(-dA/dD/(dD/dB)(nA-nc)
nB
Braço
C
nC
0
nC
Como a quarta linha é a soma algébrica das duas anteriores, determinamos as velocidades
absolutas de cada elemento, assim:
nB = (-dA/dD/(dD/dB)(nA-nc) + nC
nD = (-dA/dD)(nA-nc) + nC
nA = (nA-nc) + nC
da primeira equação: nB – nC = - dA/dB (nA-nc)
(nC –nB)/(nA-nc) = dA/dB também chamada de fórmula de Willis, onde:
ú
á
ç
á
ç
ú
á
á
ú
á
á
onde e é a relação de transmissão do sistema, que pode também ser dada em função do
número de dentes Z.
Exemplo 3.
Baseando-se no exemplo 1, determinar as freqüências de rotações de todos os elementos que
constituem o rolamento.
Solução:
Determinemos, inicialmente, os diâmetros das esferas, desprezando as folgas entre as mesmas
com os respectivos anéis: dD = 0,5(dB – dA) = 0,5(200-150) = 25 mm
Temos dA = 150 mm, dB = 200 mm, dD = 25 mm, nA = 1200 rpm e nB = 0
Considerando positivo o sentido de rotação nA = 1200 rpm, os valores que acharmos negativos
significam que esse elementos giram no anti-horário.
Substituindo nos resultados acima obtidos (nC –nB)/(nA-nc) = dA/dB , resulta:
nA = 1200 rpm anel interno, girando solidário ao eixo no sentido horário
5 nB = 0 anel externo parado, fixado no mancal estácionário
nC = 514,28 rpm gaiola (porta-esferas), girando no sentido anti-horário
nD = -3600 rpm esferas, girando no sentido anti-horário
Exemplo 4.
A caixa C é giratória, onde 4 e 7 são rodas com dentes internos. Complete o quadro abaixo, e
calcule a freqüência de rotações do eixo B
n (rpm)
elemento
diâmetro primitivo (mm)
1000
2
50
4 A 3
150
4
250
5
180
6
7
280
7
2
6 B 5
3
C
Solução: o diâmetro d6 vale 50 mm, calculado no exemplo 3. Os elementos epicicloidais já
foram classificados, basta agora escolher o caminho, iniciando pela planetária 5 e terminando
na planetária 7, caminho 5-6-7
Calculemos as freqüências de rotações:
1000.
1000.
333,3 200 5
nB
(n5 - nB)
n5
6
nB
-180(n5 - nB)/50
n6
n7 = -180(n5 - nB)/280 + nB
n6 = -180(n5 - nB)/50 + nB
n (rpm)
elemento
diâmetro primitivo (mm)
7
nB
-180(n5 - nB)/280
n7
nB = -8,7 rpm
n6 = +1160 rpm
1000
2
50
-333,3
3
150
200
4
250
B
nB
0
nB
Resultando:
-333,3
5
180
1160
6
50
200
7
280
6 QUESTÕES. Resolver os exercícios indicados em Vieira Jr, Alberto, Elementos de máquinas,
OPUS, São Bernardo do Campo, SP, 2009, calculando todas as rotações por Willis e pela
construção da tabela:
1)
2)
3)
4)
5)
6)
Exercício
Exercício
Exercício
Exercício
Exercício
Exercício
3.6
3.7
3.8
3.9 com a trava acionada
3.9 com a trava recuada
3.11
Bibliografia
Mabie, Hamilton H. Mechanisms and dynamic analysis of machinery”, John Wiley, New York,
2005;
Vieira Jr, Alberto, Elementos de máquinas, OPUS, São Bernardo do Campo, SP, 2009.
Vieira Jr, Alberto, Engrenagens, OPUS, São Bernardo do Campo, SP, 2009.
MÓDULO 3 - Estudo de mecanismo epicicloidais cônicos e seus movimentos. Estudo do
diferencial de veículo
Os mecanismos epicicloidais cônicos obedecem aos mesmos princípios dos cilíndricos,
entretanto, como os eixos das rodas cônicas não são paralelos, são concorrentes, não é
possível saber de imediato, qual sinal indicar na frente de cada fração que relaciona os pares
engrenados.
Para solvermos esse problema, devemos relacionar o sentido de rotação do porta-satélites com
o sentido de rotação da planetária mais veloz. Se ambas coincidirem, então a velocidade da
satélite será menor . No caso inverso quando o braço e a planetária mais rápida girarem em
sentidos opostos, a velocidade da satélite será maior.
Lembrar que quando os sentidos de dois elementos coincidir, o sinal que precede a fração entre
diâmetros ou número de dentes é positivo e em caso contrário, negativo.
Quando não soubermos, de antemão, qual sinal utilizar, adotamos o símbolo X ou Y para cada
fração, onde os mesmos podem ser positivos ou negativos.
Exemplo 5.
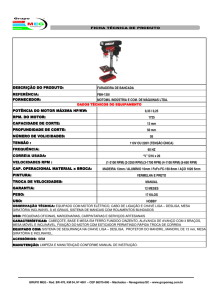
O esquema abaixo representa o sistema de transmissão de um certo veículo automotor de
massa 1800 kg. Neste sistema as planetárias do diferencial possuem 17 dentes e as satélites
possuem 13 dentes. A mudança para uma determinada marcha é feita deslizando-se a
engrenagem correspondente no eixo intermediário. O atrito das rodas com o solo é medido pela
distância de atrito = 5mm. Admita que a massa do veículo se divide igualmente entre as
rodas trativas traseiras. Rendimento do diferencial vale 0.82 , g = 9.8 m/s2 , dP2 = dP1
Determine a potência e rotação do motor M quando o veículo se desloca em linha reta a 15
km/h em 1a marcha
7 Solução: Equacionamento para o diferencial
satélites: s1, s2 com 13 dentes; planetárias p1, p2 com 17 dentes; braço é a engrenagem R
narr
p1
nR
nrel
(n
nabs
np1
equações:
s1=s2
nR
p1 - nR
n s1 = nR + x.
)
p2
nR
Zp1
x.
Zs
(n
p1 - nR
)
x.y.
ns1
Z p1
Zs
np 2 = nR + x.y.
(n
Z p1
Zp2
p1
- nR
(n
p1
Zp1
Zp 2
(n
np2
(
)
(
p1 - nR
)
0
nR
→ ns1 = nR + x. 17 np1 - nR
13
)
- nR
R
nR
)
..... .... (1)
)
→ np 2 = nR - np1 - nR = 2nR - np1 ......... (2)
Veículo em linha reta a 15km/h = 4.2 m/s ( n1 = n2 = nR ). Neste caso não há eixo móvel e o
sistema é básico, que é um caso particular do sistema epicicloidal.
60ωroda
v
= 114.6 rpm
roda roda 12 rad/s nroda = np1 = np2 =
2π
rroda
Se usarmos a equação (2), para o veículo andando em linha reta, np1 = np2 o que nos fornece
nR = np1 = np2 = 114.6 rpm
nmotor =
zR zG zB dP1
54 19 18
x
x
x
x nR =
x
x
x 1 x 114.6 = 60.5 rpm
zL zC z A dP2
9 54 72
Proda 1 = Proda 2 =
Pmotor
mg
x δ x ωroda = 540 W
2
PR1 PR1
3
x dif x 2eng x correia
rol
= 1583.7 W = 2.15 cv
Exemplo 6.
O esquema abaixo representa o sistema de transmissão de um certo veículo automotor de
massa 1800 kg. Neste sistema as planetárias do diferencial possuem 17 dentes e as satélites
possuem 13 dentes. A mudança para uma determinada marcha é feita deslizando-se a
engrenagem correspondente no eixo intermediário. O atrito das rodas com o solo é medido pela
distância de atrito = 5mm. Admita que a massa do veículo se divide igualmente entre as
rodas trativas traseiras. Sabendo-se que o veículo faz uma curva de raio 15m a 30km/h em 2a
marcha, ENG = 0.96, CORREIA = 0.93 , ROL = 0.99 , o rendimento da parte tracejada vale 0.82,
g = 9.8 m/s2 , dP2 = dP1 ,
Determine a rotação absoluta das satélites do diferencial e a potência fornecida pelo motor M:
Solução: veículo em curva a 30 km/h:
8 por semelhança: vroda 2 = 31.7 km/h = 8.81 m/s
vroda 1 = 28.3 km/h = 7.86 m/s
assim: ωroda 2 = 25.2 rad/s → np2 = 240.6 rpm
ωroda 1 = 22.4 rad/s → np1 = 214.0 rpm
n +n
da equação (2) obtém-se nR = p1 p 2 = 227 .3 rpm
Portanto, ns = 209.9 rpm (rotação2 lenta) com x = +1
planetas
sentido →
mge braço giram no mesmo
mgsatélite lento
Proda 1 =
x δ x ωroda 1 = 1134 W e Proda 2 =
x δ x ωroda 2 = 1008 W
2
2
Pmotor
PR1 PR1
3
x dif x 2eng x correia
rol
Pmotor = 3141 W = 4.3 cv
QUESTÕES. Resolver os exercícios indicados em Vieira Jr, Alberto, Elementos de máquinas,
OPUS, São Bernardo do Campo, SP, 2009, calculando todas as rotações por Willis e pela
construção da tabela:
1)
2)
3)
4)
5)
6)
Exercício
Exercício
Exercício
Exercício
Exercício
Exercício
3.10
3.12
3.13
3.14
3.15-a
3.15-b
Bibliografia
Mabie, Hamilton H. Mechanisms and dynamic analysis of machinery”, John Wiley, New York,
2005;
Vieira Jr, Alberto, Elementos de máquinas, OPUS, São Bernardo do Campo, SP, 2009.
Vieira Jr, Alberto, Engrenagens, OPUS, São Bernardo do Campo, SP, 2009.
9 MÓDULO 4 – Estudo dos mecanismos de quatro barras.
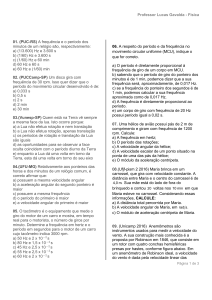
Os mecanismos articulados exercem grande influência na maioria das máquinas e equipamentos utilizados na Engenharia Mecânica. Mecanismo articulado é aquele em que as peças estão ligadas entre si por articulações. Alguns desses mecanismos articulados transmitem movimento de rotação e outros transformam este movimento em retilíneo alternativo. Um dos mecanismos mais simples e bastante comum é o de quatro barras, formando um quadrilátero. Em geral, uma das barras é estacionária e serve de apoio ao movimento das demais, essa barra estacionária é indicada com hachuras ou tracejada para mostrar que está imobilizada.. Costumamos representá‐lo de forma esquemática e determinamos as dimensões lineares e angulares desse quadrilátero. Para tanto é bastante útil utilizar a lei dos cossenos e a lei dos senos. A seguir, separamos os corpos, analisando os esforços em cada barra, impondo as condições de equilíbrio da Estática em cada uma delas, conforme os exemplos seguintes: Exemplo 7.
Determinar o valor dos ângulos e dos segmentos do mecanismo de quatro barras.
Dados: O2A = 10 cm, AB = 16 cm, AC = O2O4 = 28 cm, O4C = 14 cm. Medidas fora de escala
A T 60º O4 D
B
400 Nm
O2 80N C
Determinação de comprimentos e ângulos
Seja o triângulo A0204 e chamando:
0 0 ,
, 0
0 , 0 , , 0
temos, pela lei dos cossenos:
10
28
2.10.18.
60 24,6 Pela lei dos senos:
10
60
24,6
20,6
Pelo teorema angular de Tales:
60
180 99,4
10 No triângulo ACO4 :
L2 = 142 +282 – 2.14.28.cos 24,6
14
180 61,30
30
No triângulo AO2D:
obtendo-se
68 e
69,4
600 +
+ 69,40 = 1800 resultando
50,6
Exemplo 8.
Determinar o valor do torque T, para equilibrar o sistema.
Dados: O2A = 10 cm, AB = 16 cm, AC = O2O4 = 28 cm, O4C = 14 cm. Medidas fora de escala
A T 60º O4 D
B
400 Nm
O2 80N C
Uma vez calculados os ângulos e as demais medidas do mecanismo, calculemos os esforços em
cada barra. Iniciando pela barra CO4 e impondo somatória de momentos igual a zero, para a
força F que age em C e é perpendicular à barra CO4, obtemos:
10,7N V4
H4
O4
400 Nm
FH C
FV 400 = 14.F resulta:
F
F = 28,6 N
Projetando essa força F na horizontal e na vertical, temos:
FH = F.sen =26,5 N
FV= F.cos =10,7 N
11 Isolando a barra AC
H
A
V
B
80N
26,5N
C
10,7N
FH = 0:
H = 106,5N
FV = 0:
V = 10,7N
Isolando a barra 02A
10,7N
106,5N
A
T
H
60
O2
V
FH = 0
0
implica H = 106,5N
FV = 0 implica V = 10,7N
106,5.(10.sen60o) – 10,7.(10.cos60o) – T = 0
T = 868,8 Ncm
12 QUESTÕES.
1) Determinar o conjugado T2 necessário para manter o equilíbrio do mecanismo ilustrado.
Ignorar o atrito. Medidas fora de escala
Comprimentos: 1 = 50 mm, 2 = 75 mm, 3 = 150 mm, 4 = 150 mm e AB = 100 mm
F = 1000N A
3 4 210° B 1
2
T2 2) Determinar o valor do torque T, para equilibrar o sistema. Medidas fora de escala. Dados:
O2A = 10 cm, AB = 16 cm, AC = O2O4 = 28 cm, O4C = 14 cm.
A
T
60
O2
O4
B
400
80N
C
13 3) Determinar a força F necessária para manter o equilíbrio do mecanismo ilustrado para o
valor T2 = 5kN. Ignorar o atrito. Medidas fora de escala.
Comprimentos: 1 = 50 mm, 2 = 75 mm, 3 = 150 mm, 4 = 150 mm e AB = 100 mm
F A
4 3 210° B 1
2
T2 4) Calcular as forças e binários nas barras do mecanismo para que o mesmo permaneça em
equilíbrio. Medidas fora de escala. Dados: AB = 18 cm, BQ = 12 cm, BD = 17 cm, OD = 8 cm,
AO = 6 cm, a força P forma 40o com a horizontal e vale 120 N
B A P
1350 Q
T2
O D
14 5) Determine o valor da força FA para equilibrar o sistema. Medidas fora de escala.
Dados: AB = 8 m, AO2 = 3 m, O2O4 = 14 m, CD = 12 m, CO4 = 8 m. As forças são
135
perpendiculares às barras. 0
150 N
B
D
O2
O4
A
FA
C
6) Determinar o módulo e direção das forças que devem ser aplicadas à barra A02, para manter
o equilíbrio. Desprezar o atrito, dimensões em mm e fora de escala. AO2 = 3, AB = 7, AC = 14,
BC = 8
A
C
100 N O2
B
50 N
Bibliografia
Mabie, Hamilton H. Mechanisms and dynamic analysis of machinery”, John Wiley, New York,
2005;
Kraige, L.G. Meriam, J.L. Mecânica: Dinâmica. Rio de Janeiro: LTC, 2004.
Shigley, J.E. Dinâmica das máquinas. EDUSP
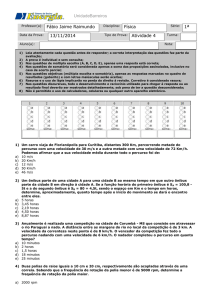
15 MÓDULO 5 – Mecanismo biela‐manivela. O mecanismo biela-manivela transforma o movimento de rotação contínuo em movimento
retilíneo alternativo e vice-versa, com aplicações em bombas e compressores, máquinas
motrizes, prensas, máquinas de serra circular, locomotivas etc.
manivela
A
guia
biela
β
θ B
O
F
B0
x
haste
No esquema, acima, temos os principais elementos:
manivela = OA que apresenta movimento circular uniforme, de raio r = AO
biela = AB que está articulada com a manivela e a haste, de comprimento L
haste = eixo articulado à biela no ponto B, que desliza no interior da guia.
Enquanto a manivela descreve uma circunferência, a haste percorre um segmento de reta,
denominado curso. O raio r da circunferência é a metade do curso da haste. Os pontos
extremos do curso são denominados ponto-morto, e o movimento não pode se iniciar nesses
pontos.
Para um giro de θ da manivela, a haste se desloca de x. Demonstra-se que o deslocamento x
da haste depende do raio r da manivela, do comprimento L da biela e do ângulo θ
Exemplo 9.
O deslocamento x, da haste é dado por:
1
A velocidade linear v da haste, vale
2
2
A aceleração linear a da haste é dada por:
2
2
Se o movimento da manivela for uniforme então
0
Para calcularmos as forças de inércia que agem no mecanismo, utilizamos a segunda lei de
Newton, onde a aceleração é multiplicada pela massa.
16 Exemplo 10.
Dado um sistema biela-manivela , com curso = 2r, r = 150 mm, freqüência de rotações da
manivela n = 500 rpm, L = 600 mm. Calcular:
a) posição, velocidade e aceleração da articulação B (conforme figura anterior), quando θ = 300
2
52,34 1
/
24,78 2
2
2
4,8 /
Como a rotação é constante:
2
407,50 b) força radial R e tangencial T que agem no pino A da manivela, para a força atuante na haste
F = 40 kN
Da figura
7,17
1
24,36 32,13 QUESTÕES.
1) Um sistema biela-manivela, apresenta comprimento do biela 120 cm, com comprimento da
biela 10 cm. A manivela gira com freqüência de rotação constante igual a 100 rpm. Pede-se:
a) deslocamento máximo do pistão
b) velocidade e aceleração do pistão para θ = 20°
2) Um sistema biela-manivela, apresenta comprimento da biela 120 cm e comprimento da
manivela 10 cm. A manivela gira com freqüência de rotação constante igual a 100 rpm. Pede-se
o deslocamento máximo do pistão, em cm.
3) Um sistema biela‐manivela que aciona uma serra rotativa, tem as seguintes características: biela de comprimento 0,8 m, manivela de comprimento 0,1 m e freqüência de rotações 300 rpm, pede‐se deduzir a fórmula da velocidade da haste do pistão e em seguida calcule essa velocidade para = 65º 17 4) Um sistema biela‐manivela que aciona uma serra rotativa, tem as seguintes características: biela de comprimento 0,8 m, manivela de comprimento 0,1 m e freqüência de rotações 300 rpm, pede‐se: O movimento é harmônico? Por quê? 5) Um sistema biela‐manivela que aciona uma serra rotativa, tem as seguintes características: biela de comprimento 0,8 m, manivela de comprimento 0,1 m e freqüência de rotações 300 rpm, pede‐se deduzir a fórmula da aceleração da haste do pistão e em seguida calcule essa aceleraçãoe para = 65º 6) Deduza as fórmulas do deslocamento, da velocidade, da aceleração e do curso máximo de um pistão em um mecanismo biela‐manivela. Bibliografia
Mabie, Hamilton H. Mechanisms and dynamic analysis of machinery”, John Wiley, New York,
2005;
Kraige, L.G. Meriam, J.L. Mecânica: Dinâmica. Rio de Janeiro: LTC, 2004.
Shigley, J.E. Dinâmica das máquinas. EDUSP
18 MÓDULO 6 ‐ Rotores e Volantes para regularização de torques, forças e dimensionamento.
Neste módulo, vamos tratar das aplicações de conceitos de trabalho, energia, momento de
inércia para posterior utilização em rotores e volantes e seu dimensionamento. Esses conceitos
já foram estudados em Mecânica Geral, portanto faremos um breve resumo dos mesmos.
Trabalho é a principal característica de uma máquina, que pode ser indicado na:
Translação:
.
onde: = trabalho, = ângulo entre a força F e o deslocamento Rotação:
onde: = trabalho,
conjugado
= ângulo de torção e
= torque, binário, momento de torção ou
Potência é a capacidade de execução do trabalho realizado na unidade de t
Energia é a capacidade de produzir trabalho. A energia mecânica, em um sistema
conservativo, pode ser indicada como a soma da energia potencial EP e da energia cinética EC
.
Momento de inércia de massa:
Momento de inércia de área:
Teorema do eixo paralelo (Steiner):
Raio de giração:
Transferência dos momentos de inércia de massas de um eixo 1 para outro 2:
onde n é a freqüência de rotação de cada eixo.
Exemplo 11.
Um trem pesa 225 tf e parte do repouso, nestas condições, considerando g = 10 m/s2 pede-se:
a) A energia a ser fornecida para que ele alcance a velocidade de 30 km/h
onde: v1 = 0, v2 = 30 km/h = 8,333 m/s e m = 225x103 kg
Resposta: E = 7,815x106 Nm
19 b) a energia necessáia para a velocidade passe de 30 km/h para 36 km/h
onde: v1 = 30 km/h = 8,333 m/s, v2 = 36 km/h =10 m/s e m = 225x103
kg
Resposta: E = 3,438x106 Nm
c) a energia necessária para que a velocidade aumente ainda de 6 km/h
onde: v1 =10, v2 = 42 km/h = 11,666 m/s e m = 225x103 kg
Resposta: E = 4,062x106
Repare que para aumentar a velocidade do mesmo valor, neste caso, necessita-se de mais
energia.
d) a energia que deverá ser dissipada na frenagem
onde: v1 = 11,666 m/s, v2 = 0 e m = 225x103 kg
Resposta: E = 15,312x106 Nm que coincide com a soma das energias dos 3 casos
anteriores.
Exemplo 12.
Um volante de aço fundido gira a 200 rpm, sabendo-se que seu volume é de 0,075 m3, seu raio
r = 1 m, g = 9,8 m/s2 e peso específico do aço é de 78500 N/m3, determine:
a) o momento de inércia de massa do volante
O peso W do volante é:
Resposta: J =151 Nms2
b) a energia fornecida para que o volante alcance 250 rpm
implica:
e
,
resultando
,
E = 18,627x103 Nm
c) a energia que o volante devolve, passando de 250 rpm para 240 rpm.
,
com n1 = 240 rpm
,
com n2 = 250 rpm
resultando
E = 4,057x103 Nm
20 d) a frequência de rotaçõe após a devolução de 7840 Nm, quando o volante girava inicialmente
a 250 rpm.
com n2 = 250 rpm
,
,
→
,
/
→ Resposta: n = 230 rpm
QUESTÕES.
1) Dado um veículo de massa 4500 kg a 120 km/h, pede-se:
a)energia necessária para imobilizá-lo
b) força de frenagem necessária para imobilizá-lo em 30 s
2) Dado um veículo de massa 1000 kg a 120 km/h, pede-se:
a)energia necessária para imobilizá-lo
b)força de frenagem necessária para imobilizá-lo em 20 s
c)distância percorrida nesses 20 s.
3) Qual o momento de inércia equivalente de uma roda que gira a 600 rpm, em relação a outra
roda com J = 0,05 Nms2 e que gira a 1000 rpm?
4) Uma mola de constante k = 5 N/mm e de comprimento inicial 150 mm, foi comprimida até o
comprimento de 80 mm, em 5 segundos. Qual o trabalho realizado e a potência empregada?
5) Uma corda com dois pesos P1 = 2000 N e P2 = 500 N em suas extremidades, apóia-se sobre
uma polia maciça de peso P3 = 200 N. Determinar a aceleração que o peso P1 adquire quando o
sistema é liberado e na ausência de qualquer resistência passiva e qual é a aceleração angular
da polia.
6) Um peso de 60 kN é içado por um guindaste, com velocidade constante de 0,3 m/s. O tempo
gasto para alcançar essa velocidade, bem como para frear é de 0,2 s. Calcular o esforço no
cabo, tanto no início , como em regime e no fim do movimento.
Bibliografia.
Franca, L.N.F.;Matsumura, A.Z. Mecânica geral. Edgar Blucher,2005
Gere, J. Mecânica dos materiais. São Paulo: Pioneira Thomson Learning, 2003.
Hibbeler, R. C. Dinâmica: mecânica para engenharia. 8ª ed. Rio de Janeiro: Prentice Hall Brasil,
2004.
Kaminski, P. C. Mecânica geral para engenheiros. Edgar Blucher, 2000.
Merian, J. L., Kraige, L. G. Estática. 4ª ed. Rio de Janeiro: LTC, 1999.
21 Provenza. Mecânica aplicada. Protec.
Kraige, L.G. Meriam, J.L. Mecânica: Dinâmica. Rio de Janeiro: LTC, 2004.
22