UNIVERSIDADE FEDERAL DO RIO DE JANEIRO
COPPE
PROGRAMA DE ENGENHARIA ELÉTRICA
COE754 – DINÂMICA E CONTROLE DE SISTEMAS DE
POTÊNCIA
Glauco Nery Taranto
Rio de Janeiro, RJ
2010
UNIVERSIDADE FEDERAL DO RIO DE JANEIRO
COPPE – Programa de Engenharia Elétrica
Prof. Glauco Nery Taranto, Ph.D.
[email protected]
Centro de Tecnologia – Ilha do Fundão
tel. 2562-8615 fax: +2562-8628
PREFÁCIO
A disciplina COE754 – Dinâmica e Controle de Sistemas de Potência pertence à Área de
Sistemas de Energia Elétrica do Programa de Engenharia Elétrica da COPPE/UFRJ, tendo
como pré-requisito a disciplina COE753 – Modelos Matemáticos para Máquinas Elétricas.
Essa apostila foi utilizada pela primeira vez em 2008 na disciplina, o que justifica o seu
estágio preliminar contendo irregularidades na sua forma e nas referências cruzadas. Pedimos
um pouco de paciência aos leitores.
Gostaria de agradecer algumas pessoas que ajudaram na confecção dessa apostila, a começar
pelo colega Leonardo T. G. Lima com quem dividi um curso de extensão em Furnas nos idos
de 1997, e lá surgiu o embrião para a formação dessa apostila. Gostaria também de agradecer
alguns ex-alunos que trabalharam comigo em assuntos abordados aqui, são eles: Antonio
Bergamo, Júlio Ferraz, Alessandro Manzoni, Tatiana Assis e Fernando Cattan.
Por fim gostaria de prestar uma homenagem in memorian ao ex-orientado e ex-colega de
profissão Prof. Alessandro Manzoni com quem reparti a disciplina COE754 nos anos de 2008
e 2009. Que seus ideais sirvam de inspiração aos futuros alunos.
COE754 – Dinâmica e Controle de Sistemas de Potência
2
UNIVERSIDADE FEDERAL DO RIO DE JANEIRO
COPPE – Programa de Engenharia Elétrica
Prof. Glauco Nery Taranto, Ph.D.
[email protected]
Centro de Tecnologia – Ilha do Fundão
tel. 2562-8615 fax: +2562-8628
SUMÁRIO
I.
VISÃO GERAL DE SISTEMAS ELÉTRICOS DE POTÊNCIA ................................. I-1
I.1
Um pouco de História ............................................................................................. I-1
I.2
A Estrutura de um Sistema Elétrico de Potência .................................................... I-2
I.3
Controle de SEP ...................................................................................................... I-3
II.
INTRODUÇÃO À ESTABILIDADE DE SISTEMAS DE POTÊNCIA ..................... II-1
II.1.
Conceitos Básicos e Definições ............................................................................. II-1
II.2.
Classificação da Estabilidade de Sistemas de Potência ......................................... II-3
III.
ESTABILIDADE TRANSITÓRIA ............................................................................. III-1
III.1
Uma Visão Elementar da Estabilidade Transitória ............................................... III-1
III.2
Resposta a um Degrau de Potência Mecânica ...................................................... III-2
III.3
Critério das Áreas Iguais ....................................................................................... III-3
III.4
Resposta a um curto-circuito ................................................................................ III-4
III.5
Fatores que influenciam a estabilidade transitória ................................................ III-6
IV.
MODELOS DE MÁQUINAS .....................................................................................IV-1
IV.1
Circuitos Acoplados Magneticamente ..................................................................IV-1
IV.2
Conversão Eletromecânica de Energia .................................................................IV-4
IV.3
Enrolamento da Máquina CA e Força Magnetomotriz .........................................IV-7
IV.4
Máquina Síncrona ...............................................................................................IV-11
IV.4.1. Circuitos Equivalentes ........................................................................... IV-15
IV.4.2. Parâmetros da Máquina Síncrona........................................................... IV-16
IV.4.3. Modelo da Máquina Síncrona para Estudos de Estabilidade ................. IV-17
IV.5
Modelo Alternativo para a Máquina Síncrona ....................................................IV-18
IV.6
Equações Mecânicas ...........................................................................................IV-21
IV.7
Limite da Capacidade de Geração de Potência Reativa ......................................IV-21
IV.7.1. Limite da Corrente de Armadura ........................................................... IV-22
IV.7.2. Limite da Corrente de Campo ................................................................ IV-22
IV.7.3. Limite por aquecimento na extremidade da armadura ........................... IV-23
V.
ACOPLAMENTO DE MODELOS .............................................................................. V-1
V.1
Estrutura do Modelo Completo do Sistema de Potência para Análise de
Estabilidade Transitória ......................................................................................... V-1
V.2
Representação da Máquina Síncrona e de seu Sistema de Excitação .................... V-2
V.3
Representação do Sistema de Transmissão e das Cargas ...................................... V-2
V.4
Equações Completas do Sistema ........................................................................... V-3
COE754 – Dinâmica e Controle de Sistemas de Potência
3
UNIVERSIDADE FEDERAL DO RIO DE JANEIRO
COPPE – Programa de Engenharia Elétrica
Prof. Glauco Nery Taranto, Ph.D.
[email protected]
Centro de Tecnologia – Ilha do Fundão
tel. 2562-8615 fax: +2562-8628
VI.
SIMULAÇÃO DE SISTEMAS ...................................................................................VI-1
VI.1
Integração Numérica .............................................................................................VI-2
VI.1.1. Acurácia ................................................................................................... VI-2
VI.1.2. Estabilidade .............................................................................................. VI-3
VI.1.3. Rigidez ..................................................................................................... VI-3
VI.2
Métodos de Integração Numérica .........................................................................VI-4
VI.2.1. Método de Euler ....................................................................................... VI-4
VI.2.2. Método de Euler Reverso ......................................................................... VI-6
VI.2.3. Método de Euler Modificado ................................................................... VI-6
VI.2.4. Método Trapezoidal ................................................................................. VI-7
VI.2.5. Método de Runge-Kutta ........................................................................... VI-9
VII. MODELOS DE REGULADORES DE TENSÃO ..................................................... VII-1
VII.1 Características Práticas ....................................................................................... VII-6
VII.2 Representação Computacional .......................................................................... VII-14
VIII. REGULAÇÃO DE VELOCIDADE ......................................................................... VIII-1
VIII.1 Introdução .......................................................................................................... VIII-1
VIII.2 Conceitos Básicos .............................................................................................. VIII-1
VIII.3 Regulação Primária ............................................................................................ VIII-2
VIII.4 Regulador Isócrono ............................................................................................ VIII-3
VIII.5 Regulador com Queda de Velocidade ................................................................ VIII-4
VIII.6 Regulação Secundária ........................................................................................ VIII-7
IX.
ESTABILIDADE A PEQUENAS PERTURBAÇÕES ...............................................IX-1
IX.1
Amortecimento de Oscilações Eletromecânicas ...................................................IX-1
IX.2
Modelo Dinâmico do Sistema ...............................................................................IX-1
IX.3
Ponto de Equilíbrio ...............................................................................................IX-2
IX.4
Linearização ..........................................................................................................IX-3
IX.5
Equações de Estado de um Sistema de Potência...................................................IX-4
IX.6
Modelo Clássico de Gerador .................................................................................IX-5
X.
AUTO–EXCITAÇÃO .................................................................................................. X-1
XI.
RESSONÂNCIA SUBSÍNCRONA ............................................................................XI-5
XI.1
Influência de Capacitores Série em Sistemas de Potência ....................................XI-5
XI.1.1. Influência de Freqüências Subsíncronas nos Geradores Síncronos ......... XI-6
XI.1.2. Influência de Freqüências Subsíncronas nos Sistemas Mecânicos do Eixo
Turbina-Gerador ..................................................................................... XI-11
COE754 – Dinâmica e Controle de Sistemas de Potência
4
UNIVERSIDADE FEDERAL DO RIO DE JANEIRO
COPPE – Programa de Engenharia Elétrica
Prof. Glauco Nery Taranto, Ph.D.
[email protected]
Centro de Tecnologia – Ilha do Fundão
tel. 2562-8615 fax: +2562-8628
XI.1.3. Análise Global ........................................................................................ XI-12
XI.2
Mecanismos da Ressonância Subsíncrona ..........................................................XI-13
XI.2.1. Efeito de Gerador de Indução ................................................................ XI-13
XI.2.2. Interação Torsional ................................................................................. XI-14
XI.2.3. Amplificação de Torque ......................................................................... XI-14
XII. REFERÊNCIAS ......................................................................................................... XII-1
XIII. APÊNDICE ............................................................................................................... XIII-1
XIII.1 SISTEMAS DINÂMICOS................................................................................. XIII-1
COE754 – Dinâmica e Controle de Sistemas de Potência
5
UNIVERSIDADE FEDERAL DO RIO DE JANEIRO
COPPE – Programa de Engenharia Elétrica
Prof. Glauco Nery Taranto, Ph.D.
[email protected]
Centro de Tecnologia – Ilha do Fundão
tel. 2562-8615 fax: +2562-8628
I.
VISÃO GERAL DE SISTEMAS ELÉTRICOS DE
POTÊNCIA
I.1 Um pouco de História1
O Desenvolvimento dos sistemas de corrente alternada (CA) começou nos Estados Unidos em
1885, quando Westinghouse comprou as patentes americanas referentes aos sistemas de
transmissão em CA, desenvolvidos por Gaulard e Gibbs, de Paris. Em 1885 Willian Stanley,
sócio de Westinghouse, instalou o primeiro sistema de distribuição experimental em CA,
alimentando 150 lâmpadas na cidade de Great Barrington em Massachusetts. A primeira linha
de transmissão em CA nos EUA foi posta em operação em 1890 para transportar energia
elétrica gerada em uma usina hidroelétrica desde Willamette Falls até Portland no Oregon,
numa distância de 20 km.
As primeiras linhas de transmissão eram monofásicas e a energia era basicamente utilizada
para iluminação. Os primeiros motores também eram monofásicos, porém em 1888, Nicola
Tesla apresentou um trabalho descrevendo motores de indução e motores síncronos bifásicos.
As vantagens dos motores polifásicos tornaram-se evidentes imediatamente, e em 1893, foi
mostrado ao público um sistema de distribuição bifásico em CA. Posteriormente, a
transmissão em CA especialmente trifásica, substituiu gradativamente os sistemas em corrente
contínua (CC). Atualmente, a transmissão de energia elétrica é feita quase que inteiramente
em CA. Uma razão forte para a aceitação atual de sistemas em CA foi o transformador que
tornou possível a transmissão de energia elétrica em uma tensão mais elevada que a tensão de
geração ou de consumo, com a grande vantagem da capacidade maior de transmissão.
Até pouco antes de 1920, os Sistemas Elétricos de Potência (SEP) eram operados como
unidades individuais porque começaram como sistemas isolados e se expandiram
gradualmente de modo a cobrir todo o país. A demanda de grandes quantidades de potência e
a necessidade de maior confiabilidade conduziram à interligação de sistemas vizinhos. A
interligação é vantajosa economicamente porque são necessárias menos máquinas como
reserva para operação na ponta do sistema (capacidade de reserva), e também são necessárias
menos máquinas funcionando em vazio para atender cargas repentinas e inesperadas (reserva
girante). A interligação também permite que uma empresa aproveite a vantagem de utilizar
fontes de potência mais econômicas, e às vezes uma empresa pode achar mais barato comprar
energia durante alguns períodos do que usá-la de sua própria geração.
Porém, como tudo na vida não vem de graça, a interligação de sistemas trouxe muitos e novos
problemas, a maioria dos quais já foi resolvido satisfatoriamente. A interligação provoca o
aumento da corrente que circula quando ocorre um curto-circuito no sistema, e requer a
instalação de disjuntores de maior capacidade. O distúrbio causado no sistema por um curtocircuito pode se estender para os sistemas a ele interligados. Os sistemas interligados devem
ter não só a mesma freqüência como também todos os geradores síncronos devem estar em
fase (em sincronismo).
A interligação dos SEPs em CA trouxe em si como problema relevante a estabilidade angular
das máquinas síncronas. Esse problema é um dos temas principais a ser estudado nesse curso.
As notas de rodapé ao longo desta apostila indicam fontes de informação a respeito de muitos
tópicos que estaremos abordando. Como informação complementar sugiro fortemente a
leitura dessas referências.
1
A Seção “Um pouco de História” foi tirada do livro de William Stevenson.
COE754 – Dinâmica e Controle de Sistemas de Potência
I-1
UNIVERSIDADE FEDERAL DO RIO DE JANEIRO
COPPE – Programa de Engenharia Elétrica
Prof. Glauco Nery Taranto, Ph.D.
[email protected]
Centro de Tecnologia – Ilha do Fundão
tel. 2562-8615 fax: +2562-8628
I.2 A Estrutura de um Sistema Elétrico de Potência
Os SEP variam em tamanho e componentes, entretanto eles têm as mesmas características
básicas:
São constituídos essencialmente de sistemas de CA trifásicos. A geração e a
transmissão são trifásicas. O consumo é geralmente trifásico a nível industrial e
monofásico a nível comercial e residencial. As cargas monofásicas são distribuídas
igualmente entre as fases de forma a manter o sistema equilibrado.
Usam máquinas síncronas para geração de eletricidade. Máquinas motrizes convertem
a fonte primária de energia (água, carvão, gás, etc.) em energia mecânica que por sua
vez é convertida em energia elétrica pelos geradores síncronos.
Transmitem potência por longas distâncias para os consumidores que estão espalhados
em grandes áreas geográficas. Isso requer um sistema de transmissão composto por
subsistemas operando em diferentes níveis de tensão.
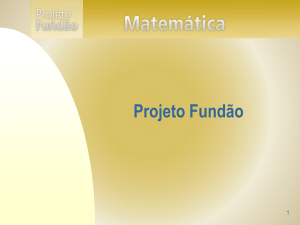
A Figura 1 mostra esses elementos básicos do SEP. É comum classificar a rede elétrica em
transmissão, sub-transmissão e distribuição.
Figura 1. Elementos Básicos de um SEP. [P. Kundur]
Nota: Pequenos geradores conectados diretamente no sistema de distribuição perto das cargas
estão ficando mais comuns ultimamente. Essa geração distribuída (GD) poderá no futuro
mudar o paradigma de operação dos atuais SEP, se sua penetração continuar aumentando.
COE754 – Dinâmica e Controle de Sistemas de Potência
I-2
UNIVERSIDADE FEDERAL DO RIO DE JANEIRO
COPPE – Programa de Engenharia Elétrica
Prof. Glauco Nery Taranto, Ph.D.
[email protected]
Centro de Tecnologia – Ilha do Fundão
tel. 2562-8615 fax: +2562-8628
I.3 Controle de SEP
A função de um SEP é converter energia de uma das formas encontradas na natureza na forma
elétrica e transportá-la até os pontos de consumo. A energia raramente é consumida na forma
elétrica, mas sim convertida em outras formas como calor, luz e energia mecânica. A
vantagem da energia elétrica é que ela pode ser transportada e controlada relativamente fácil
com alto grau de eficiência e confiabilidade. Um SEP bem projetado e operado deve atender
os seguintes princípios fundamentais:
1. O sistema deve ser capaz de continuamente atender a demanda variável de potência ativa
e reativa. Diferentemente de outras formas de energia, a eletricidade não pode ser
convenientemente estocada em quantidades suficientes. Então, uma reserva girante
adequada de potência ativa e reativa deve ser mantida e controlada apropriadamente a
todo instante;
2. O sistema deve suprir energia a custo e impacto ambiental mínimos;
3. A qualidade da energia suprida deve atender mínimos padrões em termos de freqüência,
magnitude de tensão e nível de confiabilidade.
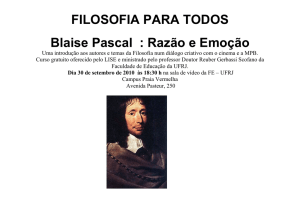
Vários níveis de controle envolvendo uma complexa rede de equipamentos são utilizados para
atender aos princípios citados. A Figura 2 mostra os subsistemas do SEP e suas malhas de
controle associadas.
Figura 2. Subsistemas de um SEP e controles associados. [P. Kundur]
COE754 – Dinâmica e Controle de Sistemas de Potência
I-3
UNIVERSIDADE FEDERAL DO RIO DE JANEIRO
COPPE – Programa de Engenharia Elétrica
Prof. Glauco Nery Taranto, Ph.D.
[email protected]
Centro de Tecnologia – Ilha do Fundão
tel. 2562-8615 fax: +2562-8628
II.
INTRODUÇÃO À ESTABILIDADE DE SISTEMAS DE
POTÊNCIA
II.1. Conceitos Básicos e Definições
A estabilidade de um sistema é uma condição de equilíbrio entre forças opostas. O
mecanismo no qual máquinas síncronas interconectadas mantêm o sincronismo em relação
umas às outras, é através de forças restauradoras que aparecem sempre quando existem forças
que tendem a acelerar ou desacelerar uma ou mais máquinas com respeito às outras máquinas.
No estado de regime permanente, existe um equilíbrio entre o torque mecânico motriz e o
torque de carga elétrica em cada máquina, fazendo com que a velocidade do rotor permaneça
constante. Se o sistema é perturbado, este equilíbrio é desfeito, resultando em aceleração ou
desaceleração dos rotores das máquinas que são regidas pelas leis de movimento rotacional de
um corpo. Se um gerador temporariamente se acelerar em relação a um outro gerador, a
posição angular do seu rotor em relação ao rotor da máquina mais lenta avançará. Esta
diferença angular faz com que parte da carga do gerador mais lento se transfira para o gerador
mais rápido, dependendo da curva Potência-Ângulo. Este fenômeno tende a reduzir a
diferença de velocidade, e por conseguinte a diferença angular, entre os dois geradores. A
relação Potência-Ângulo é não linear e, após um certo limite, um aumento na separação
angular é acompanhado com uma diminuição da potência transferida; isto faz aumentar ainda
mais a separação angular entre as máquinas acarretando o fenômeno da instabilidade, ou
perda de sincronismo. Em qualquer situação, a estabilidade do sistema dependerá da
existência de suficientes torques restauradores após uma perturbação.
Quando uma máquina síncrona perde o sincronismo do resto do sistema, o seu rotor gira
numa velocidade maior ou menor do que aquela necessária para gerar tensões na freqüência
nominal do sistema. O deslizamento entre o campo do estator, que corresponde à freqüência
do sistema, e o campo do rotor, resulta em grandes flutuações na potência de saída da
máquina, nas correntes e tensões, isto faz com que o sistema de proteção isole a máquina do
resto do sitema.
A perda de sincronismo pode ocorrer entre um gerador e o resto do sistema, ou entre grupos
de geradores. Neste último caso, o sincronismo poderá ser mantido nos sistemas isolados.
Em sistemas de potência, a mudança do torque elétrico de uma máquina síncrona
após uma pequena perturbação pode ser decomposta em duas componentes:
Te KS
KD
( .1)
onde KS
(= TS) é a componente da variação do torque em fase com a perturbação do
ângulo do rotor
e é referida como componente de torque sincronizante; KS é o coeficiente
de torque sincronizante. Já a parcela KD
(= TD) é a componente da variação do torque em
fase com a perturbação da velocidade
e é referida como componente de torque de
amortecimento; KD é o coeficiente de torque de amortecimento.
A estabilidade do sistema depende da existência das duas componentes de torque para cada
máquina síncrona. A insuficiência do torque de sincronismo resulta numa instabilidade
aperiódica do ângulo do rotor. Por outro lado, a insuficiência do torque de amortecimento,
resulta numa instabilidade oscilatória do ângulo do rotor.
Para facilidade do entendimento do fenômeno da estabilidade angular em sistemas de
potência, é usual a classificação do fenômeno nas seguintes duas categorias:
COE754 – Dinâmica e Controle de Sistemas de Potência
II-1
UNIVERSIDADE FEDERAL DO RIO DE JANEIRO
COPPE – Programa de Engenharia Elétrica
Prof. Glauco Nery Taranto, Ph.D.
[email protected]
Centro de Tecnologia – Ilha do Fundão
tel. 2562-8615 fax: +2562-8628
(a)Estabilidade frente a pequenas perturbações é a habilidade do sistema se manter em
sincronismo frente a pequenas perturbações. Estas perturbações ocorrem continuamente no
sistema devido a pequenas variações de carga e geração. Uma perturbação é considerada
suficientemente pequena se não houver considerável perda de precisão quando se analisa o
fenômeno através de um modelo linearizado. A instabilidade resultante pode ser de duas
formas: (i) aumento monotônico (aperiódico) no ângulo do rotor devido à insuficiência do
torque sincronizante, ou (ii) oscilações angulares de amplitudes crescentes devido à
insuficiência do torque de amortecimento. A natureza da resposta do sistema devido a uma
pequena perturbação depende de um número de fatores onde se incluem, entre outros, a
condição inicial do sistema, o sistema de transmissão e o tipo dos sistemas de excitação
utilizados. Para um gerador sem sistema de excitação conectado radialmente a um grande
sistema de potência, a instabilidade acontece devido a insuficiência de torque de sincronismo.
O que faz com que o sistema perca a estabilidade aperiodicamente. No caso em que o gerador
possua um sistema de excitação, o que acontece em geral, é uma perda de sincronismo
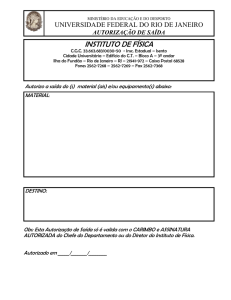
oscilatória devido à insuficiência de torque de amortecimento. A Figura 3 ilustra a natureza do
fenômeno de instabilidade relacionada aos torques de sincronismo e de amortecimento.
Estável
TS 0
TD
TD 0
tempo
TS
TD
Instável aperiódico
TS 0
TD 0
TS
tempo
Instável oscilatório
TS 0
TD 0
TS
tempo
TD
Figura 3. Resposta Dinâmica após Pequenas Perturbações
COE754 – Dinâmica e Controle de Sistemas de Potência
II-2
UNIVERSIDADE FEDERAL DO RIO DE JANEIRO
COPPE – Programa de Engenharia Elétrica
Prof. Glauco Nery Taranto, Ph.D.
[email protected]
Centro de Tecnologia – Ilha do Fundão
tel. 2562-8615 fax: +2562-8628
Nos sistemas de potência atuais, a estabilidade frente a pequenas perturbações, está quase
sempre relacionada com a insuficiência de amortecimento de oscilações. A estabilidade dos
seguintes modos de oscilações é avaliada:
Modos locais – são associados às oscilações entre unidades geradoras e o resto do sistema.
Nesse caso as unidades geradoras de uma planta de geração oscilam coerentemente contra
o sistema.
Modos intraplanta – são associados às oscilações entre as unidades geradoras de uma
mesma planta de geração.
Modos entre áreas – são associados às oscilações entre grupos de geradores de uma parte
do sistema contra outro grupo de geradores em outra parte do sistema. Em geral, aparecem
quando duas áreas são conectadas por intermédio de um sistema de transmissão de alta
impedância.
Modos de controle – são associados às oscilações causadas pelos controles dos sistemas
de excitação, reguladores de velocidade, conversores CA/CC, etc.
Modos torsionais – são associados com os componentes rotacionais dos eixos da turbina e
do gerador. A instabilidade dos modos torsionais pode ser causada pela interação com os
sistemas de excitação, controles de sistemas CCAT, e linhas de transmissão com
compensação série.
(b)Estabilidade frente a grandes perturbações (estabilidade transitória) é a habilidade de um
sistema de potência se manter em sincronismo quando sujeito à uma grande perturbação,
como um curto-circuito trifásico e uma perda de um tronco de transmissão. A resposta do
sistema, nesses casos, envolve grandes excursões dos ângulos dos rotores, sendo então
altamente influenciados pela relação não linear da potência elétrica com o ângulo do rotor. A
estabilidade vai depender do ponto inicial de operação e da natureza e duração da perturbação.
II.2. Classificação da Estabilidade de Sistemas de Potência
Apesar da estabilidade em sistemas de potência ser um problema único, não é conveniente ou
até mesmo viável estudá-lo de forma única. Várias formas de estabilidade acontecem num
sistema de potência, onde são influenciadas por vários fatores diferentes. O estudo dos
problemas de estabilidade, a identificação dos fatores essenciais que influenciam na
instabilidade do sistema e a formação de métodos que melhoram a segurança da operação, são
melhores entendidas se as diversas formas de estabilidade forem classificadas em diferentes
categorias. Essas são baseadas nas seguintes considerações:
A natureza física da instabillidade.
Tamanho da perturbação considerada.
Os equipamentos, os processos e o domínio do tempo que devem ser
considerados de forma a determinar a estabilidade.
Método mais apropriado para o cálculo ou previsão da estabilidade.
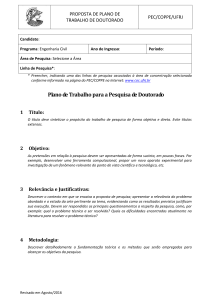
A Figura 4 mostra o quadro geral do problema de estabilidade em sistemas de potência,
identificando suas classes e sub-classes em termos das categorias previamente mencionadas.
COE754 – Dinâmica e Controle de Sistemas de Potência
II-3
UNIVERSIDADE FEDERAL DO RIO DE JANEIRO
COPPE – Programa de Engenharia Elétrica
Prof. Glauco Nery Taranto, Ph.D.
[email protected]
Centro de Tecnologia – Ilha do Fundão
tel. 2562-8615 fax: +2562-8628
ESTABILIDADE DE SISTEM AS DE POTÊNCIA
Capacidade de perm anecer em equilíbrio operativo
Equilíbrio entre forças em opos ição
ESTABILIDADE
ANGULAR
ESTABILIDADE
DE TENSÃO
Capacidade de m anter perfil de tens ão
aceitável em regime perm anente
Capacidade de m anter sincronism o
Equilíbrio de torques nas m áquinas síncronas
ESTABILIDADE A
PEQUENAS
PERTURBAÇÕES
Balanço de potência reativa
ESTABILIDADE
TRANSITÓRIA
Métodos Lineares
ESTABILIDADE
M ID-TERM
ESTABILIDADE
LONG-TERM
GRANDES
PERTURBAÇÕES
PEQUENAS
PERTURBAÇÕES
Relações PxV e QxV em
regim e perm anente
Grandes perturbações
Perturbações severas
Grandes perturbações
Prim eiro swing
Grandes excursões de tensão e freqüência
Eventos chaveados
Margem de estabilidade
Estudos até 10 s
INSTABILIDADE
APERIÓDICA
INSTABILIDADE
OSCILATÓRIA
Torque de sincronism o
ins uficiente
Dinâm ica rápida e lenta
Período de es tudo de
vários m inutos
Freqüência do sistem a
cons tante e uniforme
Dinâm ica lenta
Dinâm ica de OLTC e
cargas
Coordenação de
proteção e controles
Período de es tudo de
dezenas de m inutos
Reserva de reativo
Ponto de Colapso
Métodos Lineares
Torque de am ortecim ento insuficiente
Ação de controle desestabilizante
MODOS LOCAIS
MODOS INTER-ÁREAS
MODOS DE CONTROLE
MODOS TORSIONAIS
Figura 4. Classificação de Estabilidade em Sistemas de Potência
COE754 – Dinâmica e Controle de Sistemas de Potência
II-4
UNIVERSIDADE FEDERAL DO RIO DE JANEIRO
COPPE – Programa de Engenharia Elétrica
Prof. Glauco Nery Taranto, Ph.D.
[email protected]
Centro de Tecnologia – Ilha do Fundão
tel. 2562-8615 fax: +2562-8628
III. ESTABILIDADE TRANSITÓRIA
Estabilidade transitória é a habilidade do sistema de potência manter seu sincronismo após
sofrer uma grande perturbação, como por exemplo, um curto circuito, perda de geração, ou
perda de uma grande carga. A resposta do sistema para tais perturbações envolve grandes
variações dos ângulos dos rotores dos geradores, fluxos de potência, valor das tensões, e
outras variáveis. A estabilidade frente a grandes perturbações é influenciada pelas
características não lineares dos sistemas de potência. A perda de sincronismo devido
instabilidade transitória é usualmente percebida nos primeiros segundos após o distúrbio.
III.1 Uma Visão Elementar da Estabilidade Transitória
Considere o sistema mostrado na Figura 5. Ele é composto de um gerador conectado a um
grande sistema, representado por uma barra infinita, através de um transformador elevador e
duas linhas de transmissão.
EB
Et
X1
Xtr
X2
Figura 5. Sistema Máquina x Barra Infinita
Apresentaremos conceitos fundamentais e princípios de estabilidade transitória através de
uma análise simples envolvendo modelos simplificados. As resistências são desprezadas, o
gerador é representado por um modelo clássico e a atuação do regulador de velocidade
também é desprezada. O circuito equivalente é mostrado na Figura 6. A tensão atrás da
reatância transitória (X’d) é representada por E’. O ângulo representa o ângulo da tensão E’
em relação ao ângulo da tensão da barra infinita Eb tomada como referência. A reatância XT
representa a reatância equivalente entre a tensão interna do gerador E’ e a tensão da barra
infinita Eb. Quando o sistema é perturbado, a magnitude de E’ permanece inalterada e se
altera devido a variação da velocidade do rotor do gerador em relação a velocidade síncrona
0.
XT
E'
Pe
EB 0
Figura 6. Circuito Equivalente Reduzido do Sistema Máquina x Barra Infinita
Lembre-se que a potência elétrica ativa entregue por um gerador é dada pela Equação (I.1).
E Eb
Pe
sin
Pmax sin
(I.1)
XT
Como a resistência do estator foi desprezada, Pe representa não só a potência ativa no entreferro, assim como, a potência terminal do gerador. A curva Potência-Ângulo com as duas
linhas em serviço é representada na Figura 7 como Curva 1. A potência elétrica Pe gerada, em
COE754 – Dinâmica e Controle de Sistemas de Potência
III-1
UNIVERSIDADE FEDERAL DO RIO DE JANEIRO
COPPE – Programa de Engenharia Elétrica
Prof. Glauco Nery Taranto, Ph.D.
[email protected]
Centro de Tecnologia – Ilha do Fundão
tel. 2562-8615 fax: +2562-8628
regime permanente, se iguala a potência mecânica Pm entregue ao gerador, este ponto de
operação é representado pelo ponto a na Curva 1. O ângulo correspondente é a.
1.6
1.4
Pe com ambas
LT's em serviço
1
1.2
P
1
2
Pm
0.8
a
b
Pe com LT #2
fora de serviço
0.6
0.4
0.2
0
0
20
a
40
b
60
80
100
120
140
160
180
(graus)
Figura 7. Relação Potência – Ângulo do Sistema Máquina x Barra Infinita
Se uma das linhas estiver fora de serviço, a reatância de transferência X T é maior. A curva
Potência-Ângulo com uma das linhas fora de serviço é representada na Figura 7 como Curva
2. Neste caso, a máxima potência a ser transferida é menor. Com a mesma potência mecânica
Pm entregue ao gerador, o ângulo agora é b, que corresponde ao ponto b na Curva 2. Com
uma reatância de transferência maior, o ângulo deve ser maior de forma que a mesma
potência elétrica possa ser transmitida.
III.2 Resposta a um Degrau de Potência Mecânica
Vamos analisar o comportamento transitório do sistema, com as duas linhas em serviço,
quando a potência mecânica entregue ao gerador sofre uma variação em degrau de um valor
inicial Pm0 a um valor final Pm1 como mostrado na Figura 8.
1.6
1.4
1
Área A1
c
1.2
Pm1
P
1
Pm0
0.8
Área A2
b
a
0.6
0.4
0.2
0
0
20
0
40
1
m
60
80
100
120
140
160
180
(graus)
Figura 8. Resposta ao Degrau de Potência Mecânica
COE754 – Dinâmica e Controle de Sistemas de Potência
III-2
UNIVERSIDADE FEDERAL DO RIO DE JANEIRO
COPPE – Programa de Engenharia Elétrica
Prof. Glauco Nery Taranto, Ph.D.
[email protected]
Centro de Tecnologia – Ilha do Fundão
tel. 2562-8615 fax: +2562-8628
Devido à inércia do rotor, o ângulo não pode variar instantaneamente do valor inicial 0 para
1, correspondendo ao novo ponto de equilíbrio b onde Pe = Pm1. A potência mecânica está
maior do que a potência elétrica, o que faz com que o rotor comece a acelerar de forma a
atingir o ponto de equilíbrio b, traçando a curva Pe- . A diferença entre Pm1 e Pe em qualquer
instante representa a potência acelerante.
Quando o ponto b é atingido, a potência acelerante é zero, porém a velocidade do rotor é
maior do que a velocidade síncrona 0. Desta forma, o ângulo do rotor continua a aumentar.
Para valores de maiores que 1, Pe é maior que Pm1, então, o rotor desacelera até que um
ângulo máximo m seja atingido e o rotor esteja novamente na velocidade síncrona, porém Pe
é agora maior que Pm1. O rotor continua a desacelerar a uma velocidade abaixo da velocidade
síncrona; o ponto de operação retraça a curva Pe- de c para b e de volta para a. O ângulo do
rotor, então oscila indefinidamente ao redor do novo ponto de equilíbrio 1. Na prática,
existem várias fontes de amortecimento positivo no sistema (enrolamentos de amortecimento,
sinais adicionais estabilizantes, etc.), que fazem com que as oscilações se amorteçam
atingindo o ponto de equilíbrio b.
III.3 Critério das Áreas Iguais
Para o modelo em questão, não é necessário resolver explicitamente a equação de oscilação
(I.2) para que se determine se o ângulo do rotor aumenta indefinidamente ou oscila ao redor
de um ponto de equilíbrio.
d2
0
Pm Pe
(I.2)
dt 2 2 H
Informações relacionadas à excursão máxima do ângulo ( m) e ao limite de estabilidade
podem ser obtidas graficamente pela curva Potência-Ângulo. Apesar deste método não ser
aplicado ao caso multimáquinas com modelos detalhados dos geradores, ele ajuda a entender
conceitos básicos que influenciam na estabilidade transitória de qualquer sistema.
Em (I.2) Pe é uma função não linear de , e então (I.2) não pode ser explicitamente
solucionada. Se ambos os lados forem multiplicados por 2 d
, e integrando chega-se a:
dt
2
Pe
d
0 Pm
(I.3)
d
dt
H
Para uma operação estável, o desvio da velocidade d /dt deve ser limitado, atingindo um
valor máximo (ponto c na Figura 8) e então, mudando de direção. Para isso a variação da
velocidade d /dt se torna zero depois de algum tempo depois do distúrbio.
Da Equação (I.3) pode-se tirar o seguinte critério de estabilidade
Pe
m
0 Pm
d
0
(I.4)
0
H
onde 0 é o ângulo inicial do rotor e m é o ângulo máximo do rotor, conforme mostrado na
Figura 8. Então, a área abaixo da função Pm-Pe deve ser zero se o sistema for estável. Na
Figura 8, esta condição é satisfeita quando a área A1 é igual à área A2. Quando o ângulo
passa de 0 para 1, a energia mecânica é transferida para o rotor na forma de energia cinética,
fazendo-o acelerar. Esta energia é calculada por
LM OP
N Q
g
b
g
b
z
E1
z
b
zb
1
Pm
g
g
Pe d
área A1
A energia perdida durante a desaceleração quando
passa de
0
COE754 – Dinâmica e Controle de Sistemas de Potência
(I.5)
1
para
m
é
III-3
UNIVERSIDADE FEDERAL DO RIO DE JANEIRO
COPPE – Programa de Engenharia Elétrica
Prof. Glauco Nery Taranto, Ph.D.
[email protected]
Centro de Tecnologia – Ilha do Fundão
tel. 2562-8615 fax: +2562-8628
zb
m
E2
Pe
g
Pm d
1
(I.6)
área A 2
Como todas as perdas foram ignoradas, a energia ganha é igual a energia perdida, então a área
A1 é igual à área A2. Este fato forma a base do critério das áreas iguais. O critério nos permite
calcular o máximo ângulo para que a estabilidade se mantenha, sem que seja necessário uma
solução explícita da equação de oscilação.
O critério pode também ser utilizado para se determinar o máximo aumento possível da
potência mecânica Pm. A estabilidade é mantida somente se existir uma área A2 pelo menos
igual a área A1 localizada acima de Pm1. Se A1 é maior do que A2, a estabilidade será perdida,
pois m > L ( L = 180 - 1). Isso se deve ao fato de que para > L, Pm1 é maior do que Pe e o
torque líquido é acelerante ao invés de desacelerante.
III.4 Resposta a um curto-circuito
Vamos considerar a resposta do sistema para um curto-circuito trifásico localizado no ponto
F, conforme mostrado na Figura 9.(a). O circuito equivalente, quando assumindo um modelo
clássico para o gerador, é mostrado na Figura 9.(b). O curto é eliminado pela abertura dos
disjuntores localizados nas extremidades do circuito em curto.
EB
Et
X1
Xtr
F
X21
X22
(a). Diagrama Unifilar
X1
X'd
Xtr
F
X21
E'
X22
EB 0
(b). Circuito Equivalente
Figura 9. Sistema Máquina x Barra Infinita com Curto Circuito na Linha
Se a localização da falta F for na barra de alta tensão do gerador, nenhuma potência é
transmitida para a barra infinita. A corrente de curto-circuito flui do gerador para a falta
através de reatâncias. Então, apenas potência reativa flui no sistema, fazendo com que a
potência ativa Pe e o torque elétrico correspondente Te sejam zero no entreferro durante a
falta.
Se a localização da falta F for a uma certa distância da barra de alta tensão, conforme
mostrado nas Figuras 9.(a) e 9.(b), alguma potência ativa é transmitida para a barra infinita
durante a falta.
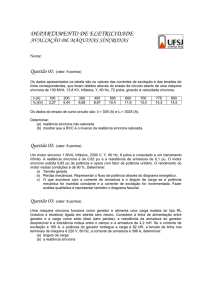
As Figuras 10.(a) e 10.(b) mostram a curva Pe x para três condições da rede:
(i)
pré-falta com os dois circuitos em serviço;
COE754 – Dinâmica e Controle de Sistemas de Potência
III-4
UNIVERSIDADE FEDERAL DO RIO DE JANEIRO
COPPE – Programa de Engenharia Elétrica
Prof. Glauco Nery Taranto, Ph.D.
[email protected]
Centro de Tecnologia – Ilha do Fundão
tel. 2562-8615 fax: +2562-8628
(ii)
com uma falta trifásica no circuito 2 localizada a uma certa distância da barra
de alta tensão;
pós-falta com o circuito 2 fora de serviço.
(iii)
1.6
Pe com LT #2
fora de serviço
1.4
Pe com ambas
LT's em serviço
1.2
P
1
d
Pm
0.8
f
a
Pe durante
a falta
e
0.6
0.4
c
0.2
b
0
0
20
0
40
c1
60
80
100
120
m
140
160
180
(graus)
(a). Sistema Estável
1.6
Pe com LT #2
fora de serviço
1.4
Pe com ambas
LT's em serviço
1.2
d
P
1
Pm
0.8
Pe durante
a falta
e
a
0.6
0.4
c
0.2
b
0
0
20
0
40
60
c2
80
100
120
140
160
180
(graus)
(b). Sistema Instável
Figura 10. Relação Pe x para Sistema Máquina x Barra Infinita com Curto Circuito
Vamos examinar o caso estável da Figura 10.(a):
(i)
sistema está operando com os dois circuitos em serviço com Pe = Pm e = 0.
(ii)
Ocorre o curto circuito, alterando o ponto de operação instantaneamente de a
para b.
COE754 – Dinâmica e Controle de Sistemas de Potência
III-5
UNIVERSIDADE FEDERAL DO RIO DE JANEIRO
COPPE – Programa de Engenharia Elétrica
Prof. Glauco Nery Taranto, Ph.D.
[email protected]
Centro de Tecnologia – Ilha do Fundão
tel. 2562-8615 fax: +2562-8628
(iii)
Devido à inércia do rotor, o ângulo não muda instantaneamente. Como
agora Pm é maior do que Pe, o rotor acelera, fazendo com que o ângulo
aumente até que o defeito é eliminado pelo isolamento do circuito 2 do
sistema.
(iv)
Neste instante, o ângulo é dado por c1 (ponto c). Com a eliminação da falta,
o ponto de operação muda instantaneamente para o ponto d e Pe passa a ser
maior que Pm.
(v)
O rotor passa a desacelerar, mas, como a velocidade está maior que a
velocidade síncrona, o ângulo continua a aumentar, até que toda a energia
cinética armazenada no rotor (área A1) seja fornecida de volta para o sistema.
Neste período, o ponto de operação move-se de d para e, onde a área A2 é
igual à área A1.
(vi)
No ponto e, a velocidade é igual à velocidade síncrona e o ângulo atingiu o
seu valor máximo m. Como Pe ainda é maior do que Pm, uma potência
desacelerante continua aplicada sobre o rotor, fazendo com que a velocidade
decresça, tornando-se menor que a velocidade síncrona.
(vii) ângulo começa, então, a decrescer, refazendo o caminho do ponto e para o
ponto d da Figura 10.(a). Na ausência de qualquer fonte de amortecimento, o
rotor continua oscilando indefinidamente com constante amplitude. Nos
sistemas reais, sempre existe algum amortecimento de forma que o sistema
tenderá ao novo ponto de equilíbrio
Com um tempo de eliminação do defeito mais longo, conforme mostrado na Figura 10.(a), a
área A2 acima de Pm é menor do que a área A1. Quando o ponto de operação atinge o ponto e,
a energia cinética ganha durante o período de aceleração ainda não foi totalmente repassada
para o sistema e, conseqüentemente, a velocidade ainda é maior do que a velocidade síncrona,
fazendo com que o ângulo continue a aumentar. Além do ponto e, Pe é menor do que Pm, e o
rotor começa a acelerar novamente. A velocidade e o ângulo do rotor continuam a aumentar,
levando o sistema à perda de sincronismo.
III.5 Fatores que influenciam a estabilidade transitória
Das discussões apresentadas nas seções anteriores, podemos concluir que a
estabilidade transitória é dependente dos seguintes fatores:
Quão carregado estão os geradores.
A potência entregue pelo gerador durante a falta. Isto depende da
localização da falta e do tipo de falta.
O tempo de eliminação da falta.
A reatância do sistema de transmissão pós-falta.
A reatância do gerador. Uma reatância baixa, aumenta a potência máxima
transmitida e reduz o ângulo inicial.
A inércia do gerador. Quanto maior a inércia, menor a variação do ângulo.
Isto faz reduzir a energia cinética durante a falta, isto é, a área A1 é reduzida.
A magnitude da tensão interna (E') do gerador. Isto depende do sistema de
excitação.
A magnitude da tensão da barra infinita (Eb).
COE754 – Dinâmica e Controle de Sistemas de Potência
III-6
UNIVERSIDADE FEDERAL DO RIO DE JANEIRO
COPPE – Programa de Engenharia Elétrica
Prof. Glauco Nery Taranto, Ph.D.
[email protected]
Centro de Tecnologia – Ilha do Fundão
tel. 2562-8615 fax: +2562-8628
IV. MODELOS DE MÁQUINAS
IV.1 Circuitos Acoplados Magneticamente
Circuitos elétricos acoplados magneticamente constituem a base da operação de
transformadores e máquinas elétricas. No caso dos transformadores, circuitos estacionários
são acoplados magneticamente para mudança de níveis de tensão e corrente. No caso das
máquinas elétricas, o acoplamento magnético ocorre entre circuitos que se movimentam em
relação uns aos outros, visando a transferência de energia entre os sistemas mecânicos e
elétricos.
A figura 11 representa dois circuitos elétricos estacionários acoplados magneticamente. Os
circuitos são compostos por enrolamentos com N1 e N2 espiras, respectivamente, enroladas em
um núcleo comum de material ferromagnético, i. e., um material cuja permeabilidade
magnética é muito maior que a do ar ( 0 = 4 .10-7 H/m).
m1
R1
R2
l1
l2
m2
Figura 11. Circuitos Elétricos Acoplados Magneticamente
O fluxo magnético que enlaça cada bobina pode ser descrito, aproximadamente, como
1
1
2
2
m1
m1
m2
(II.1)
m2
onde o fluxo de dispersão 1 é produzido pela corrente circulando pelo enrolamento 1 e
enlaça apenas as espiras do enrolamento 1. Da mesma maneira, o fluxo de dispersão 2 é
produzido pela corrente do enrolamento 2 e enlaça apenas as espiras do enrolamento 2. Já o
fluxo de magnetização m1 é produzido pela corrente do enrolamento 1 e enlaça todas as
espiras dos enrolamentos 1 e 2. O fluxo de magnetização m2 é produzido pela corrente do
enrolamento 2 e enlaça todas as espiras dos enrolamentos 1 e 2.
Os fluxos de magnetização produzidos por cada um dos enrolamentos podem estar no mesmo
sentido ou em sentidos opostos, conforme a direção das correntes. Se eles estiverem no
mesmo sentido, o fluxo magnético total no núcleo será a soma dos fluxos de magnétização
produzidos por cada enrolamento. Por outro lado, se os sentidos forem opostos, o fluxo
magnético total será a diferença entre os fluxos de magnetização. Neste caso, diz-se que um
dos enrolamentos está magnetizando o núcleo e o outro estará, portanto, desmagnetizando-o.
O enlace de fluxo de um enrolamento é definido como
N
(II.2)
COE754 – Dinâmica e Controle de Sistemas de Potência
IV-1
UNIVERSIDADE FEDERAL DO RIO DE JANEIRO
COPPE – Programa de Engenharia Elétrica
Prof. Glauco Nery Taranto, Ph.D.
[email protected]
Centro de Tecnologia – Ilha do Fundão
tel. 2562-8615 fax: +2562-8628
e, utilizando-se a teoria de circuitos magnéticos [17, 2, 1], pode-se escrever o fluxo magnético
em função da corrente do enrolamento e da geometria do problema:
Ni R
(II.3)
onde N.i é a força magnetomotriz do enrolamento e R é a relutância do circuito magnético,
definida como
l
R
(II.4)
A
onde l é o comprimento médio do caminho magnético, A é a área transversal e
é a
permeabilidade magnética do meio.
Utilizando-se as relações (II.3) e (II.4), os fluxos magnéticos mostrados na Figura 11 e
descritos pela equação (II.1) podem ser expressos como
N1 i1 N1 i1 N 2 i2
1
R1
Rm
Rm
(II.5)
N 2 i2 N1 i1 N 2 i2
2
R 2
Rm
Rm
onde R1 e R2 são as relutâncias associadas aos fluxos de dispersão dos enrolamentos 1 e 2,
respectivamente, e Rm é a relutância associada aos fluxos de magnetização, sendo comum aos
dois enrolamentos.
Os enlaces de fluxo dos enrolamentos será dado, portanto, por
1
N12
i1
R1
N12
i1
Rm
N1 N 2
i2
Rm
(II.6)
N 22
N 22
N1 N 2
i2
i2
i1
2
R1
Rm
Rm
A indutância de um circuito é definida como sendo a relação entre o enlace de fluxo e a
corrente. Para o sistema magnético da Figura 11, pode-se escrever que
N12 N12
L11
L1 Lm1
R1 Rm
L22
N 22
R 2
N 22
Rm
L12
L21
N1N 2
Rm
L 2
Lm2
(II.7)
onde L1 e L2 são as indutâncias de dispersão e Lm1 e Lm2 são as indutâncias de magnetização
dos enrolamentos 1 e 2, respectivamente. As indutâncias de magnetização e as indutâncias
mútuas L12 e L21 dependem da relutância Rm e as seguintes relações são válidas:
Lm2 Lm1
N 22 N12
(II.8)
N2
N1
L12
Lm1
Lm2
N1
N2
Utilizando-se estas expressões para as indutâncias, os enlaces de fluxo podem ser escritos
como
COE754 – Dinâmica e Controle de Sistemas de Potência
IV-2
UNIVERSIDADE FEDERAL DO RIO DE JANEIRO
COPPE – Programa de Engenharia Elétrica
Prof. Glauco Nery Taranto, Ph.D.
[email protected]
Centro de Tecnologia – Ilha do Fundão
tel. 2562-8615 fax: +2562-8628
LM OP LM
N Q N
OP LM OP
QN Q
L11 i1 L12 i2
L11 L12 i1
1
(II.9)
Li
L
i
L
i
L
L
i
2
12 1
22 2
2
12
22
2
Considerando-se toda a resistência do enrolamento concentrada em um único elemento, podese escrever, para cada enrolamento, que
d
(II.10)
v ri e ri
dt
ou, matricialmente, para todos os enrolamentos do sistema
1
d
(II.11)
dt
A equação (II.11) será utilizada para a modelagem da máquina síncrona e, em geral, as
equações são escritas referindo-se as variáveis a uma mesma base ou no sistema por unidade
(p.u.). Desta forma, pode-se fazer com que a indutância de magnetização dos enrolamentos
tenha o mesmo valor.
Esta equação, contudo, só é válida para sistemas magnéticos lineares. No caso dos
equipamentos elétricos (transformadores e máquinas), é usual a existência de saturação
magnética e da histerese (equipamentos em CA), efeitos nitidamente não-lineares. Na prática,
os modelos para estes equipamentos são obtidos a partir da equação (II.11) e corrigidos,
quando necessário, para considerar os efeitos das não-linearidades.
A simulação computacional deste sistema pode ser realizada pela integração numérica da
equação (II.11), considerando-se que as correntes e os enlaces de fluxo são relacionados pela
equação (II.9). Considerando-se as equações em p.u., pode-se escrever que
1
i1
1
m
L1 i1
L1
1
m
(II.12)
1
L 2 i2
2
m
i2
2
m
L 2
onde
v ri
R|
S|
|T
RS
T
m
b
Lm i1 i2
FG 1
HL
g
Lm
IJ
K
LM 1 b
NL
1
1
b
b
m
g
1
L 2
g
g
b
2
m
gOPQ
1
1
1
1
m
1
2
L1 L 2
L1
L 2
m
O efeito da saturação magnética pode ser incorporada ao problema se a característica de
magnetização (curva de magnetização) for conhecida. Esta pode ser obtida a partir do ensaio
em vazio do equipamento, onde desconsidera-se a queda de tensão na resistência do
enrolamento e, portanto, a tensão aplicada é proporcional à variação do enlace de fluxo. A
Figura 12 apresenta uma curva de magnetização típica.
COE754 – Dinâmica e Controle de Sistemas de Potência
IV-3
UNIVERSIDADE FEDERAL DO RIO DE JANEIRO
COPPE – Programa de Engenharia Elétrica
Prof. Glauco Nery Taranto, Ph.D.
[email protected]
Centro de Tecnologia – Ilha do Fundão
tel. 2562-8615 fax: +2562-8628
m
Lm1(i1+i2)
i1+i2
i
Figura 12. Curva de Magnetização Típica
Por hipótese, considera-se que o fluxo magnético de dispersão fecha seu caminho magnético
apenas pelo ar e, portanto, não está sujeito à saturação do material magnético. Desta forma, a
saturação magnética afeta apenas o enlace de fluxo mútuo m. Na região não-saturada, a
inclinação da curva m x i é dada por Lm. Para valores elevados de corrente, a curva de
magnetização se afasta da característica não-saturada e, assim, pode-se escrever que
(II.13)
Lm i1 i2
f m
m
onde f( m) pode ser determinada a partir da curva de magnetização mostrada na Figura 12.
b
g b g
IV.2 Conversão Eletromecânica de Energia
Em geral, os equipamentos utilizados para a conversão de energia mecânica em energia
elétrica (geradores) e para a conversão de energia elétrica em energia mecânica (motores)
utilizam um campo magnético como meio comum de interação entre os sistemas mecânico e
elétrico. A figura 13 apresenta um diagrama de blocos simplificado deste tipo de arranjo, onde
a energia pode fluir em qualquer direção.
SISTEMA
ELÉTRICO
CAMPO
MAGNÉTICO DE
ACOPLAMENTO
SISTEMA
MECÂNICO
Figura 13. Diagrama de Blocos de um Sistema de Conversão Eletromecânica de Energia
Em geral, há perdas de energia tanto no sistema mecânico quanto nos sistemas elétricos e
magnéticos. As principais perdas serão devidas ao atrito (sistema mecânico), efeito Joule
(sistema elétrico) e correntes parasitas e histerese (sistema magnético).
A Figura 14 mostra um arranjo simples de um sistema de conversão eletromecânica de
energia.
COE754 – Dinâmica e Controle de Sistemas de Potência
IV-4
UNIVERSIDADE FEDERAL DO RIO DE JANEIRO
COPPE – Programa de Engenharia Elétrica
Prof. Glauco Nery Taranto, Ph.D.
[email protected]
Centro de Tecnologia – Ilha do Fundão
tel. 2562-8615 fax: +2562-8628
K
R
L
+
f
i
M
v
fe
D
x(t)
Figura 14. Sistema de Conversão Eletromecânica de Energia
O sub-sistema elétrico da Figura 14 pode ser modelado pela seguinte equação:
di
(II.14)
v ri L
ef
dt
onde ef é a queda de tensão sobre o enrolamento.
Já o sistema mecânico pode ser representado por
d 2x
dx
f M 2 D
K x x0
fe
(II.15)
dt
dt
onde fe é a força eletromagnética que surge devido ao campo magnético, M é a massa, D é o
coeficiente de amortecimento, K é a constante da mola e x0 é a posição de equilíbrio da mola.
A energia suprida pela fonte elétrica pode ser calculada como
di
WE
v i dt
ri L
e f i dt
dt
(II.16)
b
z
z FGH
z z z
r i 2 dt
L i di
g
IJ
K
e f i dt
O primeiro termo representa as perdas por efeito Joule, enquanto o segundo termo representa
a energia magnética armazenada fora do campo magnético de acoplamento. Portanto, a
energia transferida da fonte elétrica para o campo magnético é dada por
(II.17)
We
e f i dt
z
z
Já para o sistema mecânico, a energia pode ser calculada como
d 2x
dx
WM
f dx M
dx D
dx K x x0 dx
f e dx
(II.18)
2
dt
dt
O primeiro termo corresponde à energia cinética associada à massa do corpo, enquanto o
terceiro termo corresponde à energia potencial armazenada na mola. O segundo termo
corresponde a perdas por atrito e, portanto, a energia mecânica total transferida para o campo
magnético é dada por
(II.19)
Wm
fe dx
z
z
z
z
zb
z
g
z
Desta forma, a energia armazenada no campo magnético pode ser calculada como
Wf
We Wm
e f i dt
fe dx
(II.20)
Esta equação pode ser generalizada para o caso de múltiplos sistemas elétricos (J
enrolamentos) e mecânicos (K massas), resultando em
COE754 – Dinâmica e Controle de Sistemas de Potência
IV-5
UNIVERSIDADE FEDERAL DO RIO DE JANEIRO
COPPE – Programa de Engenharia Elétrica
Prof. Glauco Nery Taranto, Ph.D.
[email protected]
Centro de Tecnologia – Ilha do Fundão
tel. 2562-8615 fax: +2562-8628
bW g
J
Wf
bW g
K
e j
(II.21)
m k
j 1
k 1
ou, na forma diferencial,
de i i dt
J
dWf
f
j 1
b f g dx
K
j j
e k
(II.22)
k
k 1
Retornando ao caso mais simples, representado pela equação (II.20), pode-se calcular a
energia armazenada no campo magnético alimentado apenas pelo sistema elétrico fazendo-se
Wm = 0, ou seja, impedindo-se o movimento do sistema mecânico (dx = 0). Neste caso,
d
Wf
e f i dt
i dt
dt
(II.23)
z
z
z
id
A Figura 15 mostra a relação x i de um sistema eletromagnético. A energia armazenada no
campo magnético, para um valor de corrente igual a i1 é igual à área A1 mostrada na figura.
1
A1
A2
i1
i
Figura 15. Energia e Co-Energia Armazenada em um Campo Magnético
z
z z
A área A2 mostrada na Figura 15 é chamada de co-energia e pode ser calculada como
Wc
di
i Wf
i
id
fe dx
(II.24)
Em um sistema magnético linear (relação
x i dada por uma reta) Wc = Wf. Fora desta
situação, a co-energia tem pouco significado físico, mas é um jeito conveniente de expressar a
energia e útil para o cálculo da força eletromagnética fe.
A equação (II.20) permite escrever que
Wf
fe
(II.25)
x
ou, em termos da co-energia, mostrada na equação (II.24),
Wc
fe
(II.26)
x
COE754 – Dinâmica e Controle de Sistemas de Potência
IV-6
UNIVERSIDADE FEDERAL DO RIO DE JANEIRO
COPPE – Programa de Engenharia Elétrica
Prof. Glauco Nery Taranto, Ph.D.
[email protected]
Centro de Tecnologia – Ilha do Fundão
tel. 2562-8615 fax: +2562-8628
A posição x do sistema mecânico descreve completamente a relação entre este e o campo
magnético. Já a influência do sistema elétrico pode ser descrito tanto por (energia) quanto
por i (co-energia), uma vez que estas variáveis não são independentes.
A escolha da posição x e do enlace de fluxo como variáveis de estado permite escrever que
Wf
b , xg z ib , xg d
zb
g
i ,x d
0
(II.27)
e, uma vez calculada a energia no campo magnético, pode-se obter a força eletromagnética fe
de acordo com a equação (II.25).
Contudo, o enlace de fluxo é uma variável menos “natural” do que a corrente, para um
engenheiro eletricista, uma vez que a medição de correntes é muito mais simples. Desta
forma, é preferível escolher a posição x e a corrente i como variáveis de estado e, então, obter
a co-energia como sendo
z
b g
Wc i, x
z
bi, xg di
i
0
b , xg d
(II.28)
obtendo-se a força eletromagnética através da equação (II.26).
Para o caso de um sistema linear com múltiplos enrolamentos, os enlaces de fluxo podem ser
escritos a partir da equação (II.9) como sendo
L11 x i1 L12 x i2 L1n x in
1 i1 , i2 , , in , x
b
g
bi , i , , i , x g
bg
L bxg i
bg
L bxg i
bi , i , , i , x g
bg
bg
2
1
2
n
12
1
22
2
bg
L b xg i
2n
n
(II.29)
bg
L1n x i1 L2 n x i2 Lnn x in
e, tomando-se as correntes e a posição como variáveis de estado, pode-se calcular a coenergia como sendo
n
1
2
n
b
Wc i1 , i2 ,, in , x
g
z
z
z
i1
0
i2
0
in
0
1
b , i ,, i , x g d
bi , , , i , x g d
bi , i , , , x g d
2
2
1
n
1
n
n
(II.30)
2
ou, equivalentemente,
b
Wc i1, i2 ,, in , x
g
bg
L b xg i i
1
L11 x i12
2
1n
1 n
bg
L b xg i i
L12 x i1 i2
12
2 n
bg
1
L22 x i22
2
1
Lnn x in2
2
bg
(II.31)
IV.3 Enrolamento da Máquina CA e Força Magnetomotriz
A Figura 16 apresenta um diagrama simplificado de uma máquina CA trifásica de 2 pólos. O
enrolamento associado a cada fase tem seu eixo magnético defasado de 120° em relação aos
eixos das demais fases. O enrolamento de campo está localizado no rotor e seu eixo
magnético pode girar de acordo com o movimento do rotor.
COE754 – Dinâmica e Controle de Sistemas de Potência
IV-7
UNIVERSIDADE FEDERAL DO RIO DE JANEIRO
COPPE – Programa de Engenharia Elétrica
Prof. Glauco Nery Taranto, Ph.D.
[email protected]
Centro de Tecnologia – Ilha do Fundão
tel. 2562-8615 fax: +2562-8628
eixo m agnético
do cam po
eixo m agnético
da fase B
r
a'4
a'3
a'2
a'1
b4
c1
b3
c2
b2
c3
f' 1
f' 2
f' 3
f' 4
f' 5
c4
b'1
s
f5
f4
f3
f2
f1
b1
eixo m agnético
da fase A
c'4
c'3
b'2
c'2
b'3
c'1
b'4
a1
a2
a3
a4
eixo m agnético
da fase C
Figura 16. Máquina CA Trifásica de 2 Pólos
Os enrolamentos das fases são considerados idênticos por possuirem a mesma resistência e o
mesmo número de espiras. Além disso, o passo do enrolamento é de 180°, i. e., uma espira é
formada por condutores diametralmente opostos.
A Figura 17 apresenta o diagrama resultante da planificação da máquina mostrada na Figura
16.
eixo da
fas e A
eixo do
eixo da cam po
fas e B
eixo da
fas e C
eixo da
fas e A
r
c'4 c'3 c'2 c'1 a4 a3 a2 a1 b'4 b'3 b'2 b'1 c4 c3 c2 c1 a'4 a'3 a'2 a'1 b4 b3 b2 b1
f3 f4 f5
f' 1 f' 2 f' 3 f' 4 f' 5
eixo do
cam po
eixo da
fas e B
eixo da
fas e A
f1 f2 f3
eixo da
fas e C
s
Figura 17. Diagrama Planificado dos Enrolamentos da Máquina CA Trifásica
A máquina representada nas Figuras 16 e 17 é uma máquina de 2 pólos com pólos salientes.
Esta máquina, na verdade, dificilmente seria construída, pois as máquinas de 2 ou 4 pólos são
máquinas cuja velocidade mecânica é relativamente alta e, nestes casos, o rotor é cilíndrico,
resultando em uma máquina de pólos lisos. Por outro lado, uma máquina de pólos salientes
COE754 – Dinâmica e Controle de Sistemas de Potência
IV-8
UNIVERSIDADE FEDERAL DO RIO DE JANEIRO
COPPE – Programa de Engenharia Elétrica
Prof. Glauco Nery Taranto, Ph.D.
[email protected]
Centro de Tecnologia – Ilha do Fundão
tel. 2562-8615 fax: +2562-8628
em geral está associada a um número elevado de pólos e, portanto, a uma baixa velocidade de
rotação.
As velocidades elétricas e mecânicas em uma máquina síncrona estão relacionadas ao número
de pólos da máquina como
P
(II.32)
e
m
2
Como a velocidade elétrica está relacionada à freqüência elétrica de operação das máquinas,
esta deve ser mantida constante (50 Hz ou 60 Hz). A velocidade mecânica, portanto, é
inversamente proporcional ao número de pólos da máquina.
A força magnetomotriz (FMM) no entreferro da máquina pode ser determinado a partir da Lei
de Ampére:
`
(II.33)
H d i
z
L
A Figura 18 apresenta novamente o diagrama planificado da máquina em que apenas o
enrolamento da fase A foi representado. A Lei de Ampére será aplicada, então, para os
caminhos fechados abcd e aefd indicados na Figura.
eixo da
fas e A
eixo da
fas e A
60o
f
a'4 a'3 a'2 a'1
a4 a3 a2 a1
H
A
H
c
B
d
A
H
bc
ef
e
b
a
eixo da
fas e A
s
Figura 18. Diagrama Planificado da Máquina CA para Cálculo da FMM
Considerando-se a permeabilidade magnética do material muito maior que a do ar, a
intensidade do campo magnético (H) no material é desprezível e, portanto, a integral mostrada
na equação (II.33) pode ser calculada considerando-se apenas os trechos dos caminhos
fechados correspondentes ao entreferro da máquina.
Considerando-se, ainda, uma distribuição uniforme dos enrolamentos das fases, cada fase
ocupa um arco de 120 no estator, com 2 seções de 60 em oposição de fase (defasadas 180 )
conforme mostrado na Figura 18.
Para o caminho fechado abcd mostrado na Figura 18, a Lei de Ampére pode ser expressa por
z
b gdl z bb gg b g H b0gdl
H b g gb g H b0g gb0g 0
b g gb g
H
rb g
r
bc
r 0
bc
bc
r 0
bc
bc
g 0
0
(II.34)
bc
onde r( bc) e r(0) são os raios do rotor e g( bc) e g(0) são os comprimentos do entreferro, nas
posições correspondentes aos ângulos s = bc e s = 0, respectivamente.
Já para o caminho fechado aefd, a Lei de Ampére resulta em
z
d idl z bb gg b g H b0gdl
H d i gd i H b0g gb0g
Ni
d i gd i
H
rd i
r
ef
r 0
ef
ef
ef
ef
r 0
ef
COE754 – Dinâmica e Controle de Sistemas de Potência
g 0
N c ia
(II.35)
c a
IV-9
UNIVERSIDADE FEDERAL DO RIO DE JANEIRO
COPPE – Programa de Engenharia Elétrica
Prof. Glauco Nery Taranto, Ph.D.
[email protected]
Centro de Tecnologia – Ilha do Fundão
tel. 2562-8615 fax: +2562-8628
onde Nc é o número de espiras do enrolamento da fase a na ranhura a1 e o sinal negativo se
deve ao fato que corrente circulando no enrolamento, no sentido indicado na Figura 18,
produz fluxo magnético no sentido oposto àquele utilizado para o caminho de integração.
Este raciocínio pode ser repetido para diversos caminhos fechados definidos para diferentes
valores de s e a distribuição de FMM produzida pelo enrolamento da fase a, ao longo da
superfície do estator, tem aproximadamente a forma mostrada na Figura 19.
eixo da
fas e A
eixo da
fas e A
a4 a3 a2 a1
a'4 a'3 a'2 a'1
s
eixo da
fas e A
Figura 19. Distribuição de FMM do Enrolamento da Fase a
Esta forma de onda pode ser entendida como uma aproximação para uma função senoidal.
Esta aproximação pode ser muito melhorada através de diversas técnicas de construção das
máquinas, como enrolamentos de passo fracionário e distribuição não-uniforme dos
enrolamentos. Quanto melhor a aproximação, menor será o desequilíbrio harmônico das
tensões e correntes de estator.
O eixo magnético da fase a pode ser interpretado, agora, como o centro da região de máximo
da distribuição de FMM do enrolamento. É fácil verificar que a distribuição de FMM dos
enrolamentos das fases b e c têm a mesma forma que aquela mostrada para a fase a, com
defasagens de 120 em relação a esta.
Estas distribuições de FMM podem ser decompostas em suas componentes harmônicas (série
de Fourier) e, considerando-se apenas a componente fundamental de cada fase, pode-se
escrever que
N
FMM a
ia cos s
2
N
2
FMM b
ib cos s
(II.36)
2
3
N
2
FMM c
ic cos s
2
3
onde N é o número total de espiras do enrolamento equivalente de fase.
A distribuição de FMM resultante dos enrolamentos do estator é dada, então, pela soma das
distribuições mostradas na equação (II.36). Se as correntes dos enrolamentos são correntes
trifásicas equilibradas, pode-se escrever que
N3 2
FMM
I cos et
(II.37)
ei 0
s
2 2
onde e é a freqüência angular das correntes, ei(0) é o ângulo de fase das correntes para t = 0
e I é o valor rms das correntes.
FG
H
FG
H
IJ
K
IJ
K
bg
COE754 – Dinâmica e Controle de Sistemas de Potência
IV-10
UNIVERSIDADE FEDERAL DO RIO DE JANEIRO
COPPE – Programa de Engenharia Elétrica
Prof. Glauco Nery Taranto, Ph.D.
[email protected]
Centro de Tecnologia – Ilha do Fundão
tel. 2562-8615 fax: +2562-8628
A equação (II.37) representa uma onda de FMM que gira com freqüência igual
àquela das correntes que a produziram e, além disso, corresponde a uma distribuição senoidal
ao longo da superfície do estator (quando s varia).
IV.4 Máquina Síncrona
Conhecidas as distribuições de FMM no interior da máquina síncrona, o modelo elétrico para
a mesma é obtida a partir da determinação das indutâncias próprias e mútuas relacionadas aos
diversos enrolamentos.
Para isto, é necessário obter uma expressão para o comprimento do entreferro da máquina. A
hipótese utilizada aqui [2] é que o entreferro varia senoidalmente conforme
1
g r
(II.38)
1
2 cos 2 r
b g
b g
onde r é o ângulo medido em relação ao eixo magnético do enrolamento de campo
(associado à posição do rotor).
Do ponto de vista do estator, o entreferro pode ser escrito como sendo
1
(II.39)
g s
r
1
2 cos 2 s
r
b
g
b
g
onde r é a posição do rotor em relação ao estator, variando conforme a rotação do mesmo.
A densidade de fluxo magnético pode ser definida a partir da força magnetomotriz como
FMM
(II.40)
B
0
g
e, aplicando-se a equação (II.40) associada às equações (II.36) e (II.39), obtém-se
N
Ba s , r
ia cos s 1
0
2 cos 2
s
r
2
N
2
(II.41)
Bb s , r
ib cos s
0
1
2 cos 2
s
r
2
3
b
b
Bb
c
s
,
r
g
g
g
0
b gn
FG
IJ n
H
K
N
F 2 IJ n
i cosG
H 3K
2
c
s
b
1
2
gs
b
cos 2b
s
r
gs
gs
Já a densidade de fluxo magnético produzida a partir do enrolamento do rotor pode ser dada
por
N fd
(II.42)
B fd r
i fd sin r 1
0
2 cos 2 r
2
As indutâncias (próprias ou mútuas) são calculadas a partir da relação entre o fluxo enlaçado
por um enrolamento e a corrente que cria este fluxo. A determinação do fluxo magnético pode
ser feita a partir da densidade de fluxo e é possível mostrar que as indutâncias da máquina
síncrona podem ser expressas como
b g
COE754 – Dinâmica e Controle de Sistemas de Potência
b g
b g
IV-11
UNIVERSIDADE FEDERAL DO RIO DE JANEIRO
COPPE – Programa de Engenharia Elétrica
Prof. Glauco Nery Taranto, Ph.D.
[email protected]
Centro de Tecnologia – Ilha do Fundão
tel. 2562-8615 fax: +2562-8628
Laa
Lcc
Lab
Lbc
Lbfd
b g L L L L cos 2FGH 23 IJK
F 2 IJ L L L
L L L cos 2G
H 3K
1
F
IJ L 1 L L cosFG 2 IJ
L L cosG 2
H
H 3K
2
3K
2
1
L L cosb2
g L L cos
2
F 2 IJ L L cosFG 2 IJ
L cosG
H 3K
H 3K
L
LA
A
LB cos 2
r
B
r
A
B
r
A
B
r
sfd
A
sfd
sfd
FG N IJ rl L
H 2K
FG N IJ FG N IJ rlFG
H 2 KH 2 K H
FG N IJ rlFG
H2K H
Lsfd
0
1
2
Lmfd
0
1
r
(II.43)
r
FG N IJ
H 2K
2
0
rl
2
IJ
2K
f
f
B
r
B
0
mfd
A
afd
cfd
r
fd
ac
2
LA
B
fdfd
r
onde
bb
2
1
IJ
2K
2
sendo r é o raio médio do entreferro e l é o comprimento axial do estator.
Em uma máquina síncrona real, é possível encontrar enrolamentos curto-circuitados montados
no rotor, chamados enrolamentos amortecedores. Em máquinas de rotor cilíndrico, há a
possibilidade de circulação de correntes parasitas, cujo efeito é parecido com aquele dos
enrolamentos amortecedores. Desta forma, um modelo completo para a máquina síncrona
deve permitir a incorporação de circuitos equivalentes para este tipo de enrolamento. A
determinação das indutâncias próprias e mútuas associadas a estes enrolamentos pode ser feita
de forma similar àquela apresentada acima.
Para cada enrolamento da máquina, pode-se escrever uma equação de tensão equivalente
àquela mostrada na equação (II.10), resultando em
d a
va ra ia
dt
d b
vb rb ib
dt
d c
vc rc ic
dt
(II.44)
d fd
v fd rfd i fd
dt
d kd
vkd 0 rkd ikd
dt
d kq
vkq 0 rkq ikq
dt
onde
COE754 – Dinâmica e Controle de Sistemas de Potência
IV-12
UNIVERSIDADE FEDERAL DO RIO DE JANEIRO
COPPE – Programa de Engenharia Elétrica
Prof. Glauco Nery Taranto, Ph.D.
[email protected]
Centro de Tecnologia – Ilha do Fundão
tel. 2562-8615 fax: +2562-8628
a
Laa ia
Labib
Lac ic
Lafd i fd
Lakd ikd
Lakq ikq
b
Labia
Lbbib
Lbc ic
Lbfd i fd
Lbkd ikd
Lbkq ikq
c
Lac ia
Lbc ib
Lcc ic
Lcfd i fd
Lckd ikd
Lckq ikq
fd
Lafd ia
Lbfd ib
Lcfd ic
L fdfd i fd
kd
Lakd ia
Lbkd ib
Lckd ic
L fdkd i fd
(II.45)
L fdkd ikd
Lkdkd ikd
Lakq ia Lbkq ib Lckq ic Lkq ikq
e os subscritos kd e kq estão associados a enrolamentos amortecedores de eixo d e q,
respectivamente. Deve-se notar que as indutâncias mútuas entre os enrolamentos de eixo d (fd
e kd) e o enrolamento de eixo q (kq) são nulas, devido à ortogonalidade entre estes eixos.
As equações (II.44) e (II.45) descrevem completamente a dinâmica elétrica da máquina
síncrona, mas dependem da posição angular do rotor r, que, por sua vez, varia com o tempo.
Tomando-se como exemplo a expressão para o enlace de fluxo do enrolamento de campo,
mostrada na equação (II.45), e substituíndo-se os valores das indutâncias mostradas na
equação (II.43), obtém-se
2
2
Lsfd ia cos r ib cos r
ic cos r
L fdfd i fd L fdkd ikd
fd
3
3
A parcela entre colchetes representa a projeção das correntes das fases abc sobre o eixo d,
conforme mostrado na Figura 20.
kq
LM
N
FG
H
IJ
K
IJ OP
KQ
FG
H
q
d
b
120o-
r
r
a
120o+
r
c
Figura 20. Interpretação Geométrica da Transformada de Park
COE754 – Dinâmica e Controle de Sistemas de Potência
IV-13
UNIVERSIDADE FEDERAL DO RIO DE JANEIRO
COPPE – Programa de Engenharia Elétrica
Prof. Glauco Nery Taranto, Ph.D.
[email protected]
Centro de Tecnologia – Ilha do Fundão
tel. 2562-8615 fax: +2562-8628
Na verdade, a transformação ilustrada na Figura 20 é uma simples mudança de eixos de
referência, podendo ser expressa por uma relação matricial. A transformada de Park
usualmente adotada para a representação de máquinas síncronas é definida por
xa
cos
sin
1 xd
(II.46)
xb
cos
120
sin
120
1 xq
LM OP
MM x PP
N Q
c
LM
MM b
Ncosb
OP L O
g b
g P MM PP
120 g
sinb 120 g 1PQ MN x PQ
0
ou, em notação matricial compacta,
x abc Tx dq0
A matriz T sempre possui inversa, de modo que a transformação inversa é dada por
LMx OP
MM xx PP
N Q
d
q
0
2
3
LM cos
MM sin
N 12
b
b
cos
sin
120
120
1
g
g
b
b
cos
sin
120
120
1
2
2
(II.47)
g OP LMx OP
gP M x P
PQ MN x PQ
a
(II.48)
b
c
ou, equivalentemente,
x dq 0 T 1x abc
(II.49)
Pode-se aplicar a transformada de Park para transformar grandezas trifásicas como tensão,
corrente, carga elétrica e enlace de fluxo de suas coordenadas de fase (abc) para coordenadas
dq0 e vice-e-versa. Aplicando-se esta transformação às equações (II.44) e (II.45), obtém-se o
modelo da máquina síncrona em coordenadas dq0, onde o sistema por unidade foi aplicado de
forma a obter uma matriz de indutâncias simétrica:
d q
vq
riq
r d
dt
d d
vd
rid
r q
dt
d 0
v0
ri0
dt
(II.50)
d fd
v fd rfd i fd
dt
d kd
vkd 0 rkd ikd
dt
d kq
vkq 0 rkq ikq
dt
L
L
L
iq
s
aq
aq
q
Laq
Lkq Laq
ikq
kq
LM
MM
MM
MM
N
d
fd
kd
0
OP
PP
PP
PP
Q
LM
MM
MM
MM
N
Ls
Lad
Lad
Lad
Lad
Lfd Lmd
Lmd
d
d
eqiq
2e0i0
i
(II.51)
fd
kd
s
A potência elétrica da máquina pode ser expressa por
3
P ea ia ebib ec ic
ed id
2
COE754 – Dinâmica e Controle de Sistemas de Potência
Lad
Lmd
Lkd Lmd
OP LM OP
PP MM i PP
PP MM i PP
PP MM i PP
L QN i Q
0
(II.52)
IV-14
UNIVERSIDADE FEDERAL DO RIO DE JANEIRO
COPPE – Programa de Engenharia Elétrica
Prof. Glauco Nery Taranto, Ph.D.
[email protected]
Centro de Tecnologia – Ilha do Fundão
tel. 2562-8615 fax: +2562-8628
ou, através de uma escolha criteriosa de bases para o sistema por unidade,
Ppu ed id eqiq 2e0i0
O torque elétrico da máquina síncrona pode ser dado, em por unidade, como
Te
d iq
qid
(II.53)
(II.54)
IV.4.1. Circuitos Equivalentes
A Figura 21 apresenta um circuito magnético equivalente para representar os enlaces de fluxo
de eixo direto, mostrados na equação (II.51).
L
Lmd Lad
ikd
i fd
id
Lfd
Lad
Lkd
d
fd
kd
Figura 21. Circuito Equivalente de Eixo d para a Relação
xi
Este circuito pode ser utilizado para se obter um circuito elétrico equivalente. Neste caso, para
incorporar as equações de tensão, torna-se necessário utilizar as derivadas dos enlaces de
fluxo. A Figura 22 apresenta os circuitos equivalentes de eixo d e q para a máquina síncrona.
r
r
q
-
L
+
Lmd
Lad
id
i fd
ikd
Lfd
Lkd
d d
dt
vd
Lad
rfd
d
d
kd
dt
rkd
fd
dt
+
v fd
-
(a). Eixo d
r
r
d
+
-
L
iq
ikq2
ikq1
Lkq1
vq
d
q
dt
Laq
d
d
kq1
dt
COE754 – Dinâmica e Controle de Sistemas de Potência
Lkq 2
rkq1
kq2
rkq2
dt
IV-15
UNIVERSIDADE FEDERAL DO RIO DE JANEIRO
COPPE – Programa de Engenharia Elétrica
Prof. Glauco Nery Taranto, Ph.D.
[email protected]
Centro de Tecnologia – Ilha do Fundão
tel. 2562-8615 fax: +2562-8628
(b). Eixo q
Figura 22. Circuitos Elétricos Equivalentes da Máquina Síncrona
A indutância Lmd – Lad no circuito equivalente de eixo d representa o efeito do enlace de fluxo
entre os enrolamentos de campo e amortecedor de eixo d e que não enlaça os enrolamentos de
estator. É comum supor que este efeito é nulo (Lmd = Lad), mas existem casos em que este
efeito não pode ser negligenciado.
Por outro lado, não há enrolamento de campo no eixo q e os enrolamentos de rotor associados
a este eixo representam exclusivamente efeitos dos enrolamentos amortecedores e/ou
correntes parasitas circulando no núcleo do rotor. Neste caso, supõe-se que todos os
enrolamentos de eixo q enlaçam o mesmo fluxo, representado por Laq.
IV.4.2. Parâmetros da Máquina Síncrona
Os parâmetros (resistências e indutâncias) utilizados para representar a máquina síncrona nas
equações (II.50) e (II.51) descrevem completamente seu comportamento dinâmico e são
chamados de parâmetros básicos ou fundamentais da máquina síncrona. Contudo, não é
possível determiná-los diretamente a partir de ensaios e, portanto, torna-se necessária sua
determinação de forma indireta.
Isto é feito a partir dos circuitos equivalentes mostrados na Figura 22. É possível escrever
relações incrementais entre as grandezas de estator e de rotor da máquina síncrona a partir da
aplicação da transformada de Laplace nas relações derivadas dos circuitos equivalentes:
G s E fd s Ld s I d s
d s
(II.55)
Lq s Iq s
q s
onde Ld(s) e Lq(s) são chamadas de indutâncias operacionais da máquina síncrona.
Pode-se mostrar que os termos da equação (II.55) podem ser expressos como
1 sTd 1 sTd
Ld s Ld
1 sTd 0 1 sTd 0
bg bg bg bg bg
bg bg bg
b gb g
b gb g
d1 sT id1 sT i
L b sg L
d1 sT id1 sT i
b1 sT g
G b sg G
b1 sT gb1 sT g
Sob condições de regime permanente, fazendo-se s = 0, obtém-se
L b0g L
L b0g L
bg
q
q
q
q0
q0
(II.56)
q
kd
0
d0
d0
d
d
q
q
(II.57)
que são as indutâncias síncronas (de eixo d e q, respectivamente) da máquina.
Durante um transitório muito rápido, fazendo-se s
, obtém-se
T T
Ld
Ld Ld d d
Td 0 Td 0
T T
Lq
Lq Lq q q
Tq 0 Tq 0
bg
(II.58)
bg
que são as indutâncias sub-transitórias (de eixo d e q, respectivamente) da máquina.
Na ausência de enrolamentos amortecedores, o valor limite para a indutância é dado por
COE754 – Dinâmica e Controle de Sistemas de Potência
IV-16
UNIVERSIDADE FEDERAL DO RIO DE JANEIRO
COPPE – Programa de Engenharia Elétrica
Prof. Glauco Nery Taranto, Ph.D.
[email protected]
Centro de Tecnologia – Ilha do Fundão
tel. 2562-8615 fax: +2562-8628
Ld
Lq
bg
bg
Ld
Lq
Ld
Lq
Td
Td 0
Tq
(II.59)
Tq 0
e correspondem às indutâncias transitórias da máquina.
Os valores das indutâncias síncronas, transitórias e sub-transitórias, bem como os valores das
constantes de tempo mostradas nas equações (II.56) a (II.59) podem ser obtidos a partir de
ensaios da máquina síncrona e, em geral, são dados fornecidos pelos fabricantes (dados de
placa).
Os parâmetros básicos da máquina síncrona podem ser determinados a partir dos dados
usualmente disponíveis para a máquina. A equação (II.60) apresenta as relações simplificadas
para esta determinação, considerando-se Lmd = Lad. Estas expressões podem ser diretamente
utilizadas para a determinação dos parâmetros de eixo q de uma máquina representada por
dois circuitos amortecedores de eixo q, usual na modelagem de turbo-geradores.
Lad Lfd
Ld L Lad
Td 0
rfd
Ld
L
Ld
L
Lad Lfd
Lad
Lfd
Lad Lfd Lkd
Td 0
F
GH
1
Lkd
rkd
Lad Lfd
Lad
Lfd
I
JK
(II.60)
Lad Lfd Lad Lkd Lfd Lkd
No caso de hidro-geradores, estas máquinas são, em geral, de pólos salientes e o único
circuito de eixo q, no rotor, é o enrolamento amortecedor. Nestes casos, o transitório de eixo q
é muito rápido, passando-se do período sub-transitório para o regime permanente sem um
período transitório característico. A máquina possui, então, indutâncias síncrona e subtransitória de eixo q, e uma constante de tempo sub-transitória. Os parâmetros básicos de eixo
q são obtidos pelas seguintes relações:
L Laq
Lq L Laq
Tq 0
rkq
Laq Lkq
(II.61)
Lq L
Laq Lkq
A referência [17] apresenta expressões gerais relacionando os parâmetros básicos da máquina
com os dados usuais, tanto para o caso em que Lmd Lad quanto para aproximações mais
acuradas das indutâncias operacionais.
IV.4.3. Modelo da Máquina Síncrona para Estudos de Estabilidade
Nos estudos de estabilidade, algumas simplificações podem ser aplicadas às equações da
máquina síncrona:
Desprezar os termos relativos ao efeito de transformador,;
Desprezar os efeitos de variação da velocidade.
d q
d d
Os termos relativos ao efeito de transformador,
dt , estão relacionados aos
dt e
transitórios dos enrolamentos de estator. Estes transitórios são de natureza eletromagnéticas e
COE754 – Dinâmica e Controle de Sistemas de Potência
IV-17
UNIVERSIDADE FEDERAL DO RIO DE JANEIRO
COPPE – Programa de Engenharia Elétrica
Prof. Glauco Nery Taranto, Ph.D.
[email protected]
Centro de Tecnologia – Ilha do Fundão
tel. 2562-8615 fax: +2562-8628
têm, em geral, constantes de tempo muito menores que aquelas associadas aos transitórios
eletromecânicos.
Considerando-se estes transitórios como muito rápidos, pode-se considerar que o estator está
operando em regime permanente senoidal e utilizar equações algébricas (fasoriais) para
representar a rede elétrica que interliga as máquinas síncronas.
Isto acarreta uma enorme simplificação, uma vez que a modelagem dinâmica do sistema de
transmissão acarretaria um enorme aumento na ordem do sistema de equações diferenciais
(equações de estado), inviabilizando a análise da estabilidade de sistemas de grande porte.
A velocidade síncrona do sistema é utilizada como base no sistema por unidade. O resultado
disto é que as velocidades das máquinas síncronas estarão próximas a 1 p.u., permitindo que
as equações de tensão dos enrolamentos de estator (dq) se reduzam a
vd
rid
q
(II.62)
vq
riq
d
e fazendo com que os torques se tornem, numericamente, iguais às potências (P = T).
IV.5 Modelo Alternativo para a Máquina Síncrona
Um modelo dinâmico para a máquina síncrona, baseado nos parâmetros de placa da máquina,
pode ser desenvolvido utilizando-se as seguintes aproximações [8]:
(a) A velocidade do rotor não se desvia muito do valor nominal de 1,0 p.u. e pode ser
considerada constante;
(b) Todas as indutâncias são independentes da corrente, i. e., os efeitos da saturação
magnética foram desconsiderados;
(c) As indutâncias dos enrolamentos das máquina podem ser aproximadas por uma constante
somada como funções harmônicas da posição do rotor;
(d) Enrolamentos distribuídos podem ser representados por enrolamentos concentrados
equivalentes;
(e) A máquina síncrona pode ser representada por uma fonte de tensão atrás de uma reatância;
(f) Não há perdas por histerese no ferro e os efeitos das correntes parasitas são representados
através de um enrolamento equivalente de rotor;
(g) Só há reatância de dispersão nos enrolamentos de estator.
Regime Permanente
A Figura 23 apresenta o diagrama fasorial de uma máquina síncrona em regime permanente.
O fluxo f é proporcional à corrente de campo If e, em regime permanente, à tensão aplicada
no enrolamento de campo. Este fluxo está alinhado com o eixo direto da máquina. A tensão
terminal em vazio da máquina síncrona Ef é proporcional ao fluxo f e se encontra 90
adiantada em relação a este, estando, portanto, alinhada com o eixo em quadratura.
Quando uma carga é aplicada à máquina, a circulação de correntes nos enrolamentos de
estator produz um fluxo magnético , em fase com a corrente, que se compõe fasorialmente
com o fluxo de campo para produzir o fluxo equivalente de entreferro e. A tensão interna da
máquina síncrona VI é proporcional ao fluxo de entreferro, defasada de 90 . A tensão terminal
V é obtida a partir de VI considerando-se a queda de tensão na resistência e na reatância de
dispersão do enrolamento de estator. Pode-se provar, ainda, que a diferença entre Ef e VI está
em fase com j Xl.i e é proporcional à corrente. Desta forma, esta diferença pode ser
considerada como sendo a queda de tensão em uma reatância de armadura Xa. A soma entre
Xa e Xl é a reatância síncrona da máquina.
COE754 – Dinâmica e Controle de Sistemas de Potência
IV-18
UNIVERSIDADE FEDERAL DO RIO DE JANEIRO
COPPE – Programa de Engenharia Elétrica
Prof. Glauco Nery Taranto, Ph.D.
[email protected]
Centro de Tecnologia – Ilha do Fundão
tel. 2562-8615 fax: +2562-8628
eixo d
f
e
eixo q
Ef
I.X a
I
Vl
V
I.X l
I.R a
(a). Máquina de Pólos Lisos
eixo d
q
f
d
e
Iq
Id
Ef
I.X a
I
eixo q
Iq.Xaq
Vl
V
Id.Xad
I.R a
I.X l
(b). Máquina de Pólos Salientes
Figura 23. Diagrama Fasorial da Máquina Síncrona em Regime Permanente
Para o caso da máquina de pólos salientes, o diagrama fasorial é um pouco mais complicado.
As variáveis podem ser decompostas termos de suas componentes de eixo d e eixo q,
conforme mostrado para a corrente.
Devido à diferença entre os caminhos magnéticos nestes dois eixos, a corrente Id produzirá
um fluxo magnético d proporcional e em fase com a corrente, assim como a corrente Iq
COE754 – Dinâmica e Controle de Sistemas de Potência
IV-19
UNIVERSIDADE FEDERAL DO RIO DE JANEIRO
COPPE – Programa de Engenharia Elétrica
Prof. Glauco Nery Taranto, Ph.D.
[email protected]
Centro de Tecnologia – Ilha do Fundão
tel. 2562-8615 fax: +2562-8628
produzirá um fluxo magnético q. Contudo, a proporcionalidade entre fluxo e corrente
depende, neste caso, da direção considerada, sendo mais fácil produzir fluxo na direção do
eixo d do que na direção do eixo q.
Desta forma, o fluxo produzido pela corrente de carga não é proporcional a esta corrente,
nem tampouco se encotra em fase com ela.
A tensão interna equivalente da máquina é proporcional ao fluxo magnético de entreferro e
defasada de 90 em relação a este. Novamente, a tensão terminal será obtida levando-se em
conta a queda de tensão sobre a resistência e a reatância de dispersão do estator. A reatância
de armadura, neste caso, pode ser decomposta em termos dos eixos d e q, resultando em Xad e
Xaq. As reatâncias síncronas são a soma destas reatâncias de armadura com a reatância de
dispersão.
As seguintes relações são válidas para representar a máquina síncrona em regime permanente:
X d X X ad
Xq
X
X aq
E fd Vq
Ra Iq
Vd
Ra I d
(II.63)
X d Id
X q Iq
Regime Transitório
Para mudanças mais rápidas nas condições externas da máquina síncrona, as relações de
regime permanente não são mais válidas. Os enlaces de fluxo não podem variar
instantaneamente e, conseqüentemente, torna-se necessário o uso de equações diferenciais que
descrevam esta variação.
Isto é feito definindo-se as tensões transitórias atrás da reatância transitória tal que
Eq Vq Ra Iq X d Id
(II.64)
Ed Vd Ra Id X q Iq
A partir desta definição, é possível chegar às seguintes equações diferenciais:
dEq
1
E fd
X d X d I d Eq
dt
Td 0
(II.65)
dEd
1
X q X q I d Ed
dt
Tq 0
b
g
d
i
A Figura 24 apresenta o diagrama fasorial correspondente à operação da máquina no estado
transitório.
eixo d
Ei
Iq
eixo q
Ef
Id
I
E'
V
Iq.X' q
Iq.Xq
Id.X' d
I.R a
Id.Xd
Figura 24. Diagrama Fasorial da Máquina Síncrona em Regime Transitório
Regime Sub-Transitório
COE754 – Dinâmica e Controle de Sistemas de Potência
IV-20
UNIVERSIDADE FEDERAL DO RIO DE JANEIRO
COPPE – Programa de Engenharia Elétrica
Prof. Glauco Nery Taranto, Ph.D.
[email protected]
Centro de Tecnologia – Ilha do Fundão
tel. 2562-8615 fax: +2562-8628
Quando necessário, devido à presença de enrolamentos amortecedores ou outros efeitos
similares, pode-se considerar os efeitos sub-transitórios da máquina síncrona de maneira
similar àquela utilizada para o regime transitório. As equações resultantes são dadas por
Eq Vq Ra Iq X d I d
Ed Vd
dEq
dt
dEd
dt
Ra Iq
X q Iq
bX
dX
1
Eq
Td 0
1
Ed
Tq 0
d
q
g
X iI
X d Id
q
Eq
(II.66)
Ed
q
IV.6 Equações Mecânicas
Para a análise da estabilidade de um sistema de potência, a correta modelagem do movimento
do rotor é de fundamental importância. O modelo mais simples empregado neste caso é
baseado na Lei de Newton para o movimento circular de um corpo rígido, cujo resultado, já
em termos de valores por unidade, é dado por
d
1
Tm Te K D
dt 2 H
(II.67)
d
s 1
dt
onde Tm = torque mecânico produzido pela turbina;
Te = torque elétrico da máquina, dado pela equação (II.54);
KD = constante de amortecimento;
H = constante de inércia da máquina em MW.s/MVA;
s = velocidade síncrona do sistema (2 f);
A velocidade
é, na verdade, o desvio de velocidade da máquina em relação à
velocidade síncrona. A constante de amortecimento é uma forma simples de representar o
amortecimento que existe no sistema real, devido a diversos fatores, nas equações mecânicas.
O grande problema está na correta determinação de seu valor, para cada máquina do sistema.
b
g
b g
O torque mecânico Tm é o torque de saída da turbina e, na verdade, pode ser ajustado
a partir do sistema de controle de velocidade da máquina. Contudo, devido às inércias
envolvidas no problema, as constantes de tempo típicas dos reguladores de velocidade são de
cerca de alguns segundos. Desta forma, uma aproximação usualmente empregada em estudos
de estabilidade transitória é considerar-se o torque mecânico constante e igual ao valor de
regime permanente durante todo o período em estudo.
IV.7 Limite da Capacidade de Geração de Potência Reativa2
Em estudos de estabilidade de tensão é muito importante considerar os limites de capacidade
de geração de potência reativa dos geradores síncronos. Esses são, normalmente,
especificados de acordo com sua capacidade nominal de geração (MVA) à uma dada tensão e
fator de potência. A geração de potência ativa é limitada pela capacidade do sistema motriz,
quando esse tiver uma capacidade menor do que a capacidade nominal da máquina. A
geração, de forma contínua, de potência reativa é limitada por três fatores: limite da corrente
2
As figuras dessa seção foram retiradas do livro, “Power System Stability and Control,” P. Kundur, 1994.
COE754 – Dinâmica e Controle de Sistemas de Potência
IV-21
UNIVERSIDADE FEDERAL DO RIO DE JANEIRO
COPPE – Programa de Engenharia Elétrica
Prof. Glauco Nery Taranto, Ph.D.
[email protected]
Centro de Tecnologia – Ilha do Fundão
tel. 2562-8615 fax: +2562-8628
de armadura, limite da corrente de campo e limite por aquecimento na parte final da
armadura.
IV.7.1. Limite da Corrente de Armadura
O limite da corrente de armadura está relacionado com a máxima corrente suportável que não
exceda o limite de aquecimento do circuito da armadura. O limite de corrente de armadura no
plano P-Q é mostrada na Figura 42.
Figura 42. Limite da Corrente de Armadura
IV.7.2. Limite da Corrente de Campo
2
Devido ao aquecimento resultante da perda R fd i fd , a corrente de campo impõe um segundo
limite na operação do gerador. A Figura 43 mostra no plano P-Q o limite devido à corrente de
campo. A relação entre as potências ativa e reativa para uma dada corrente de campo é um
2
círculo com centro em Et / X S no eixo Q, e com raio igual à ( X ad / X S ) Et iif .
COE754 – Dinâmica e Controle de Sistemas de Potência
IV-22
UNIVERSIDADE FEDERAL DO RIO DE JANEIRO
COPPE – Programa de Engenharia Elétrica
Prof. Glauco Nery Taranto, Ph.D.
[email protected]
Centro de Tecnologia – Ilha do Fundão
tel. 2562-8615 fax: +2562-8628
Figura 43. Limite da Corrente de Campo
A Figura 43 mostra que a intersecção das duas curvas (ponto A) representa a potência e o
fator de potência nominal da máquina.
IV.7.3. Limite por aquecimento na extremidade da armadura
O aquecimento localizado na extremidade da armadura, conforme mostrado na Figura 44,
impõe um terceiro limite à operação do gerador. Essa limitação da capacidade do gerador
acontece quando a máquina está operando na condição subexcitada. Na região terminal da
máquina o fluxo magnético de dispersão penetra no estator de forma axial causando correntes
parasitas (ou correntes de Foucault) com conseqüente aquecimento localizado. Quando o
gerador está sobre excitado a corrente de campo elevada satura o anel de retenção (mostrado
na Figura 44) que limita o fluxo de dispersão. Entretanto quando o gerador está subexcitado
as correntes menores não saturam o anel de retenção, permitindo maiores fluxos na armadura
e de dispersão. Além disso, na condição de subexcitação, o fluxo produzido pela corrente de
armadura se soma ao fluxo produzido pela corrente de campo.
Figura 44. Vista de corte da parte final do gerador
A Figura 45 mostra o limite devido ao aquecimento da parte final da armadura quando o
gerador se encontra subexcitado.
COE754 – Dinâmica e Controle de Sistemas de Potência
IV-23
UNIVERSIDADE FEDERAL DO RIO DE JANEIRO
COPPE – Programa de Engenharia Elétrica
Prof. Glauco Nery Taranto, Ph.D.
[email protected]
Centro de Tecnologia – Ilha do Fundão
tel. 2562-8615 fax: +2562-8628
Figura 45. Limite associado ao aquecimento da parte final da armadura
Os limites de corrente de campo e de armadura quando mostrados no plano P-Q dependem da
tensão terminal da máquina. A Figura 46 mostra o efeito da tensão terminal nesses limites.
Observe que os limites diminuem quando a tensão terminal diminui.
Figura 46. Efeito da redução da tensão terminal na capacidade do gerador
Todos os gráficos mostrados anteriormente representam os limites impostos pela capacidade
do gerador, que é definida no seu projeto de fabricação. Restrições operativas adicionais
podem ser impostas pelos limites de estabilidade do sistema de potência.
A Figura 47 mostra as curvas de capacidade de um gerador de 400 MVA, refrigerado por
hidrogênio, acionado por uma turbina à vapor, na tensão nominal. A eficácia do sistema de
refrigeração, com conseqüente influência na capacidade do gerador, depende da pressão do
hidrogênio. Observe que à medida que se aumenta a pressão do hidrogênio, se aumenta a
capacidade operativa do gerador.
COE754 – Dinâmica e Controle de Sistemas de Potência
IV-24
UNIVERSIDADE FEDERAL DO RIO DE JANEIRO
COPPE – Programa de Engenharia Elétrica
Prof. Glauco Nery Taranto, Ph.D.
[email protected]
Centro de Tecnologia – Ilha do Fundão
tel. 2562-8615 fax: +2562-8628
Figura 47. Efeito do resfriamento do gerador à tensão nominal em sua capacidade
COE754 – Dinâmica e Controle de Sistemas de Potência
IV-25
UNIVERSIDADE FEDERAL DO RIO DE JANEIRO
COPPE – Programa de Engenharia Elétrica
Prof. Glauco Nery Taranto, Ph.D.
[email protected]
Centro de Tecnologia – Ilha do Fundão
tel. 2562-8615 fax: +2562-8628
V.
ACOPLAMENTO DE MODELOS
V.1 Estrutura do Modelo Completo do Sistema de Potência para
Análise de Estabilidade Transitória
A análise da estabilidade transitória de sistemas de potência envolve a solução da resposta
dinâmica não linear para uma grande perturbação no sistema, como por exemplo, um curtocircuito no sistema de transmissão seguido do isolamento do elemento em curto pela proteção.
A Figura 31 mostra a estrutura geral do modelo do sistema de potência usado na análise da
estabilidade transitória. Nesta estrutura, grandes descontinuidades devidas, principalmente por
faltas e chaveamentos, adicionadas a pequenas descontinuidades devidas, por exemplo por
limites nas variáveis, estão presentes no modelo do sistema. Outras informações relevantes
além das relacionadas com a estabilidade são, as tensões das barras, os fluxos nas linhas e o
desempenho do sistema de proteção.
Equações elétricas do
es tator e
transform ação de
coordenadas
Er,Ei
Ir,I i
demais
geradores
Equações elétricas
as sociadas aos
circuitos do rotor
Equações do
Sistem a de
Excitação
Equações mecânicas
do movimento do
rotor
Equações do
Regulador de
Velocidade
Equações de um a única
m áquina nos seus eixos d-q
Equações da Rede
Elétrica (m atriz Ybarra)
incluíndo cargas estáticas
m otores e cargas
dinâm icas
outros
equipamentos
dinâm icos
Equações da rede
elétrica na referência
com um (real-im aginário)
Figura 25. Estrutura Completa do Modelo para Análise de Estabilidade Transitória
Conforme mostrado na Figura 25, a representação global do sistema de potência inclui
modelos para os seguintes componentes:
Geradores síncronos e seus sistemas de excitação e motriz.
Rede de transmissão incluindo as cargas estáticas.
Cargas de motores síncronos e de indução.
Outros equipamentos, como por exemplo, os sistemas HVDC e FACTS.
O modelo usado na representação de cada componente deve ser apropriado para a análise da
estabilidade transitória, e as equações do sistema devem ser organizadas de forma apropriada
para os métodos númericos.
O modelo completo do sistema consiste num grande sistema de equações diferenciais
ordinárias junto com um grande sistema de equações algébricas esparsas.
COE754 – Dinâmica e Controle de Sistemas de Potência
V-1
UNIVERSIDADE FEDERAL DO RIO DE JANEIRO
COPPE – Programa de Engenharia Elétrica
Prof. Glauco Nery Taranto, Ph.D.
[email protected]
Centro de Tecnologia – Ilha do Fundão
tel. 2562-8615 fax: +2562-8628
V.2 Representação da Máquina Síncrona e de seu Sistema de
Excitação
O modelo da máquina síncrona nos estudos de estabilidade transitória, é representado por
equações diferenciais derivadas do modelo de Park (eixos d-q). A ordem deste modelo
depende do grau de complexidade na representação dos efeitos transitórios e subtransitórios
que ocorrem nos circuitos do rotor da máquina síncrona. A dinâmica do estator é, em geral,
desprezada nos estudos de estabilidade transitória, transformando assim, suas equações
diferenciais em equações algébricas. Completando o modelo da máquina síncrona, tem-se a
equação diferencial que modela o movimento do rotor (equação de oscilação).
Os vários modelos de sistemas de excitação descritos no capítulo anterior, são apenas uma
mostra da infinidade de modelos existentes no mercado. Estes basicamente são representados
por ganhos, constantes de tempo, limitadores, blocos de saturação e sinais estabilizantes.
V.3 Representação do Sistema de Transmissão e das Cargas
O sistema de transmissão, assim como o estator da máquina síncrona, é representado por um
modelo algébrico, isto é, o transitório da rede comparado com transitório eletromecânico é
muito mais rápido. Este fato nos leva a desprezar a dinâmica da rede. Nas análises em
condições equilibradas, basta representarmos o circuito trifásico pelo equivalente monofásico.
Em condições desequilibradas, a análise é feita levando em conta os componentes simétricos.
Em situações especiais, onde se requer a representação dinâmica da rede e do estator da
máquina síncrona, os programas de transitórios eletromagnéticos (tipo EMTP) devem ser
usados.
A forma mais conveniente de se representar a rede, é em termos da matriz admitância nodal.
As cargas dinâmicas são representadas da mesma forma que os motores síncronos e de
indução.
As cargas estáticas são representadas como parte das equações da rede. As cargas com
características de impedância constante são as mais simples de serem tratadas, sendo incluídas
na matriz admitância nodal. Cargas não lineares são modeladas como funções exponenciais
ou polinomiais da magnitude da tensão e da freqüência. Desta forma, a carga estática não
linear é tratada como uma injeção de corrente apropriada na equação da rede. O valor da
corrente injetada no nó é dada por
PL jQL
IL
(III.1)
VL*
onde VL* é o conjugado da tensão na barra de carga, e PL e QL são as frações das cargas ativa e
reativa que variam como funções não lineares de VL e do desvio da freqüência. Por
convenção, QL é positivo para cargas indutivas.
A representação geral da rede e da carga consiste numa equação matricial de admitância nodal
esparsa da forma
I YV
(III.2)
e cuja estrutura é similar àquela da matriz usada nos estudos de fluxo de potência.
A matriz admitância nodal Y é simétrica, exceto pelas assimetrias introduzidas pelos
transformadores defasadores. Dentro do domínio do tempo das simulações de estabilidade
transitória, os taps dos transformadores e as defasagens angulares não mudam. Então, os
elementos da matriz são constantes a menos das mudanças na configuração da rede.
COE754 – Dinâmica e Controle de Sistemas de Potência
V-2
UNIVERSIDADE FEDERAL DO RIO DE JANEIRO
COPPE – Programa de Engenharia Elétrica
Prof. Glauco Nery Taranto, Ph.D.
[email protected]
Centro de Tecnologia – Ilha do Fundão
tel. 2562-8615 fax: +2562-8628
Os efeitos dos geradores, cargas estáticas não lineares, cargas dinâmicas, assim como outros
elementos como HVDC e FACTS são refletidos como condições de fronteira representadas
em relações adicionais entre V e I nos respectivos nós.
Em contraste à análise dos estudos de fluxo de potência, o controle de fluxo em LTs, limites
na geração de potência reativa e balanço das perdas pela barra de referência, não precisam ser
consideradas nos estudos de estabilidade transitória.
Para simular uma falta no sistema, basta mudar, de forma apropriada, o valor da admitância
própria da barra com o defeito.
V.4 Equações Completas do Sistema
As equações para cada gerador e para cada equipamento dinâmico podem ser expressas da
seguinte forma:
(III.3)
x d f d x d , Vd
b g
g bx , V g
(III.4)
Id
d
d
d
onde xd = vetor de estado de cada equipamento
Id = injeção de corrente do equipamento para a rede
Vd = tensão da barra
As equações gerais do sistema, incluindo as equações diferenciais (III.3) para todos os
equipamentos e a combinação das equações algébricas dos equipamentos (III.4) e a rede
(III.2) são expressas na seguinte forma geral correspondendo a um conjunto de equações
diferenciais ordinárias de primeira ordem:
(III.5)
x f x, V
e o conjunto de equações algébricas
(III.6)
I x, V YV
com um conjunto de condições iniciais conhecidas (x0, V0), onde
x = vetor de estado do sistema
V = vetor das tensões nodais
I = vetor das injeções de corrente
Vários métodos já foram propostos na literatura para a solução dessas equações, dependendo
dos métodos numéricos empregados e dos detalhes da modelagem. Esses vários métodos de
solução das Equações (III.5) e (III.6) são caracterizados pelos seguintes fatores:
modo de interface entre as equações diferenciais (III.5) e as equações algébricas
(III.6). Um método chamado particionado e outro chamado simultâneo podem ser
usados.
método de integração utilizado, isto é, método implícito ou método explícito.
método usado na solução das equações algébricas. Os métodos que podem ser
utilizados são: (i) o método de Gauss-Seidel baseado na formulação da matriz de
admitância nodal; (ii) um método de solução direta usando fatoração triangular e
técnicas de esparsidade, e (iii) um método de solução iterativa que usa o método
de Newton-Raphson.
Todos os métodos descritos acima já foram utilizados com sucesso em programas de
estabilidade transitória comerciais de grande porte.
b g
b g
COE754 – Dinâmica e Controle de Sistemas de Potência
V-3
UNIVERSIDADE FEDERAL DO RIO DE JANEIRO
COPPE – Programa de Engenharia Elétrica
Prof. Glauco Nery Taranto, Ph.D.
[email protected]
Centro de Tecnologia – Ilha do Fundão
tel. 2562-8615 fax: +2562-8628
VI. SIMULAÇÃO DE SISTEMAS
Os componentes envolvidos nos sistemas de controle são amplamente diferentes. Eles podem
ser eletromecânicos, hidráulicos, pneumáticos, eletrônicos, etc. Em engenharia de controle,
em vez de tratar dos dispositivos de hardware, substituem-se tais dispositivos ou
componentes pelos seus modelos matemáticos.
Obter um modelo matemático razoavelmente preciso de um componente físico é um dos
problemas mais importantes em engenharia de controle. Notar que, para ser útil, um modelo
não deve ser muito complicado nem muito simplificado. Um modelo matemático deve
representar os aspectos essenciais de um componente físico. As previsões do comportamento
do sistema baseadas no modelo matemático devem ser razoavelmente precisas. Notar também
que sistemas que parecem diferentes podem ser representados pelo mesmo modelo
matemático. O uso de tais modelos matemáticos possibilita aos engenheiros de controle
desenvolver uma teoria unificada. Em engenharia de controle são comumente usadas
equações diferenciais lineares invariantes no tempo, funções de transferência e equações com
variáveis de estado para modelos matemáticos de sistemas lineares invariantes no tempo e
contínuos.
Embora as relações de entrada-saída de muitos componentes sejam não-lineares, normalmente
linearizam-se tais relações em torno de pontos de operação e analisa-se o desempenho do
sistema para pequenas variações em torno do ponto de linearização. Certamente, estes
modelos linearizados são muito mais fáceis de tratar analiticamente e computacionalmente.
Para estudar um dado sistema, o mínimo necessário seria a capacidade de prever a saída
(resposta) deste sistema para qualquer entrada (excitação) desejada.
Uma primeira idéia seria aplicar, no sistema sob estudo, todas as entradas possíveis e, depois,
analisar as respostas obtidas. Este método “experimental” possui algumas deficiências
fundamentais:
é praticamente impossível saber, a priori, todas as entradas possíveis que se desejaria
analisar;
pode ser arriscado (para pessoas ou para o próprio sistema) a aplicação de entradas
sem que se tenha idéia da resposta esperada; (você gostaria de estar em um avião
sendo submetido a “ensaios” ?);
pode não ser prático aplicar a(s) entrada(s) e registrar, simultaneamente, a(s) saída(s)
(por exemplo, entrada = aumento de carga na área Rio e saída = geração da UHE
Itaipu);
pode ser muito difícil, ou até mesmo impossível, analisar as respostas obtidas e extrair
conclusões.
Para evitar estes problemas, os engenheiros buscam modelos que representem o
comportamento do sistema e que possam ser utilizados na simulação deste sistema nas mais
diversas situações que possam ser imaginadas. Um bom modelo permite estudar um sistema
real, possibilitando a obtenção da resposta (saída) deste sistema, para qualquer entrada
desejada, através de simulação.
A simulação pode ser analógica ou digital:
a simulação analógica é possível através do uso de modelos reduzidos e/ou
equivalentes do sistema real que são submetidos, então, aos mesmos sinais (entradas)
que seriam aplicados ao sistema real.
COE754 – Dinâmica e Controle de Sistemas de Potência
VI-1
UNIVERSIDADE FEDERAL DO RIO DE JANEIRO
COPPE – Programa de Engenharia Elétrica
Prof. Glauco Nery Taranto, Ph.D.
[email protected]
Centro de Tecnologia – Ilha do Fundão
tel. 2562-8615 fax: +2562-8628
a simulação digital consiste na formulação de um modelo matemático para o sistema a
ser analisado e a sua simulação através de técnicas numéricas baseadas em
computadores.
O problema principal desta abordagem pode ser resumido na seguinte questão: o que é e
como pode ser obtido um bom modelo ?
Como o modelo será usado para simular o desempenho de um sistema real, duas facetas
compõem este problema:
as equações matemáticas utilizadas para representar o sistema devem incluir
todos os fenômenos relavantes para a análise a ser efetuada;
a obtenção de uma solução para estas equações tem que ser exeqüível e produzir
resultados precisos e consistentes com a análise.
Como, em geral, os modelos dinâmicos estão baseados em equações diferenciais, a
solução numérica desta classe de problemas tem que ser examinada com alguma atenção.
VI.1 Integração Numérica
Para a análise da estabilidade transitória de sistemas de potência, deve-se resolver um
conjunto de equações diferenciais não-lineares de 1a ordem, com condições iniciais
conhecidas, da forma
(IV.1)
x f x, r, t
onde x = vetor de variáveis de estado;
r = vetor de variáveis algébricas;
t = tempo.
As variáveis algébricas estão relacionadas a restrições algébricas da forma
b
g
b
g
0 g x, r,t
que devem ser satisfeitas a cada instante de tempo.
(IV.2)
Em geral, equações diferenciais não-lineares só admitem solução numérica, i. e., calculada
passo a passo. Diversos algoritmos de integração numérica são conhecidos e a escolha do
“melhor” depende grandemente do problema. Assim sendo, algumas características inerentes
aos métodos de integração devem ser analisadas para se chegar a uma conclusão.
Os principais métodos de integração numérica podem ser interpretados como aproximações
baseadas no truncamento da expressão da solução do problema em termos de sua série de
Taylor:
2
3
dx t
d 2x t
t
d 3x t
t
x t0
t x t0
t
(IV.3)
dt t t
dt 2 t t 2 !
dt 3 t t 3!
b
g bg
bg
0
bg b g
bg b g
0
0
VI.1.1. Acurácia
Esta característica é dada, principalmente, por dois fatores:
Erros de arredondamento;
Erros de truncamento.
Os erros de arredondamento estão relacionados à representação dos números em um
computador (aritmética finita) e podem ser minimizados utilizando-se dupla precisão e/ou
outros recursos inerentes ao computador sendo utilizado para resolver o problema.
Já os erros de truncamento são devidos à aproximação da solução real do problema utilizada
pelo método de integração escolhido.
COE754 – Dinâmica e Controle de Sistemas de Potência
VI-2
UNIVERSIDADE FEDERAL DO RIO DE JANEIRO
COPPE – Programa de Engenharia Elétrica
Prof. Glauco Nery Taranto, Ph.D.
[email protected]
Centro de Tecnologia – Ilha do Fundão
tel. 2562-8615 fax: +2562-8628
O erro de truncamento pode ser analisado a partir da série de Taylor da função, mostrada na
equação (IV.3), e será proporcional a
p 1
t
(IV.4)
onde t é o passo de integração escolhido e p é a ordem da série de Taylor utilizada pelo
método de integração como aproximação da solução.
A solução verdadeira do problema, em um dado instante de tempo tn, será dada, portanto, por
y tn
yn O t p 1
(IV.5)
n
b g
bg
c
h
onde yn é a aproximação calculada pelo método de integração, O
grandeza da acurácia do método e
processo.
VI.1.2. Estabilidade
n
c
tp
1
h
é a ordem de
representa os demais erros que podem surgir no
Dois tipos de instabilidade podem ocorrer na solução de equações diferenciais ordinárias:
Instabilidade inerente; e
Instabilidade induzida.
A instabilidade inerente surge quando erros numéricos são amplificados, a cada
passo da solução, até dominar completamente o cálculo e fazer o método divergir da solução
real.
Já a instabilidade induzida está relacionada com o método de integração utilizado ou, de
maneira mais precisa, com a discretização resultante da aplicação do método, que depende,
também, do passo de integração escolhido.
Pode-se mostrar que os métodos de integração correspondem a resolver uma equação
algébrica da forma
dyn 1
dyn
dy
(IV.6)
k nk1 0
0 yn 1
1 yn
2 yn 1
k yn k 1
0
1
dt
dt
dt
onde i e i são constantes e deseja-se determinar yn+1, conhecendo-se os valores anteriores de
yi (i < n+1).
Esta é uma equação discreta, linear, e será estável se todas as raízes de seu polinômio
característico tiverem módulo menor que 1.
O maior problema está no fato que quanto maior a acurácia do método, menor será sua
estabilidade. Isto é mais grave para os métodos em que o passo de integração é crítico para a
solução, em especial os métodos de Runge-Kutta. Estes métodos são estáveis apenas para
alguns valores de t e são ditos condicionalmente estáveis.
Métodos com margem de estabilidade infinita (independente de t) são chamados métodos Aestáveis e os métodos de Euler Reverso e Trapezoidal estão nesta categoria.
VI.1.3. Rigidez
Um sistema de equações diferenciais é dito rígido (“stiff”) quando a razão entre a maior e a
menor constantes de tempo do problema for muito maior que 1.
Métodos de integração tradicionais têm seu intervalo de integração definido pela menor
constante de tempo e o tempo final da simulação é definido pela maior constante de tempo.
Desta forma, um grande número de pontos deverão ser determinados, aumentando
sobremaneira o tempo de computação. Além disso, se o método de integração não for Aestável, pode haver problemas de instabilidade numérica.
COE754 – Dinâmica e Controle de Sistemas de Potência
VI-3
UNIVERSIDADE FEDERAL DO RIO DE JANEIRO
COPPE – Programa de Engenharia Elétrica
Prof. Glauco Nery Taranto, Ph.D.
[email protected]
Centro de Tecnologia – Ilha do Fundão
tel. 2562-8615 fax: +2562-8628
VI.2 Métodos de Integração Numérica
Os métodos de integração numérica, como foi visto na seção anterior, representam uma
discretização da solução, de forma que a equação diferencial original (contínua) é aproximada
por uma equação de diferenças (discreta) e apenas alguns valores (correspondentes a
determinados instantes de tempo) são calculados, que corresponderão à solução aproximada
obtida. A Figura 26 ilustra este efeito, em que uma função é aproximada a partir de valores
discretos.
2.5
2
1.5
1
x(t)
0.5
0
-0.5
-1
-1.5
-2
-2.5
0
0.2
0.4
0.6
0.8
1
t
Figura 26. Discretização de uma Função Contínua
Para exemplificar a aplicação dos diversos métodos de integração numérica, será utilizado o
seguinte sistema linear de equações diferenciais:
x1 x2
x1 0 x10
(IV.7)
x2
a1x1 a2 x2 x2 0 x20
RS
T
bg
bg
cuja solução analítica é da forma
R| x bt g
S|
|Tx bt g
2
x10
x20
1
2
2
e
x20
1t
1
2 x10
2
x20
1
2
1
1
e
x10
2t
1
x20
1t
e
1
x10
2
2
(IV.8)
e
2t
1
onde
a22 4a1
(IV.9)
1, 2
2
são as raízes do polinômio característico da equação diferencial de 2a ordem associada à
equação (IV.7) ou, equivalentemente, são os pólos da função de transferência deste sistema.
VI.2.1. Método de Euler
a2
O método de Euler é o mais simples dos métodos de integração numérica e pode ser
visualizado na Figura 27. Utilizando-se o valor da derivada da função no instante de tempo t =
t0, pode-se escrever que
COE754 – Dinâmica e Controle de Sistemas de Potência
VI-4
UNIVERSIDADE FEDERAL DO RIO DE JANEIRO
COPPE – Programa de Engenharia Elétrica
Prof. Glauco Nery Taranto, Ph.D.
[email protected]
Centro de Tecnologia – Ilha do Fundão
tel. 2562-8615 fax: +2562-8628
b
x t0
t
g xbt g dxdtbt g
t
0
(IV.10)
t t0
0.7
0.6
0.5
x(t)
0.4
0.3
0.2
x'(t). t
t
0.1
0
-0.1
0
0.2
0.4
0.6
0.8
1
1.2
t
Figura 27. Interpretação Gráfica do Método de Euler
Este método corresponde à aplicação da série de Taylor, mostrada na equação (IV.3),
aproximada apenas pelos dois primeiros termos. Desta forma, a acurácia deste método é da
ordem O t 2 .
c h
A discretização do sistema de equações, dada pelo método de Euler, é equivalente àquela da
equação (IV.6) fazendo-se
1
1
0
t
0
1
0
1
(IV.11)
0
0
2
3
k
2
3
k
A aplicação do método de Euler para a solução do sistema dado pela equação (IV.7) resulta
em
R| b x g b x g FG dx
H dt
|S
||b x g b x g FG dx
H dt
T
1
1 n 1
1 n
2
2 n 1
2 n
n
IJ
K
IJ
K
t
(IV.12)
t
n
O método de Euler pode ser implementado de forma explícita ou implícita. Em sua forma
explícita, o valor das derivadas mostradas na equação (IV.12) são explicitamente calculadas a
cada passo do algoritmo. Já no caso de haver expressões analíticas para as derivadas, estas
podem ser substituídas, resultando em um sistema de equações que não dependem
explicitamente das derivadas.
Para o exemplo dado, a equação (IV.7) fornece expressões analíticas para as derivadas,
resultando no seguinte sistema de equações:
x1 n 1 x1 n x2 n t
x1 n 1
x1 n
1
t
(IV.13)
x2 n 1 x2 n
a1 x1 n a2 x2 n t
x2 n 1
a1 t 1 a2 t x2 n
R| b g b g b g
S|b g b g
b g
T
b g
COE754 – Dinâmica e Controle de Sistemas de Potência
LMb g OP L
Nb g Q MN
OPLMb
QNb
g OP
gQ
VI-5
UNIVERSIDADE FEDERAL DO RIO DE JANEIRO
COPPE – Programa de Engenharia Elétrica
Prof. Glauco Nery Taranto, Ph.D.
[email protected]
Centro de Tecnologia – Ilha do Fundão
tel. 2562-8615 fax: +2562-8628
A formulação implícita permite reduzir o erro numérico que pode haver na
determinação das derivadas das funções, que são substituídas por expressões analíticas
equivalentes.
VI.2.2. Método de Euler Reverso
O método de Euler reverso (“backward Euler”) modifica o método de Euler original,
utilizando o valor da derivada no instante de tempo t = t0+ t na equação (IV.10):
dx t
x t0
t x t0
t
(IV.14)
dt t t t
g b g bg
b
0
A discretização resultante da aplicação deste método também pode ser expressa pela equação
(IV.6), onde, neste caso,
1
1
t
0
0
1
0
1
(IV.15)
0
0
2
3
k
2
3
k
Este método é mais estável que o método de Euler convencional (“forward Euler”), mas sua
implementação requer o cálculo do valor da derivada em um instante de tempo para o qual
ainda não se conhece o estado.
A implementação explícita, neste caso, requer uma extrapolação inicial para a determinação
do valor do estado no instante t = t0+ t para permitir o cálculo da derivada. A aplicação deste
método para o sistema exemplo da equação (IV.7) resulta em
R| b x g b x g FG dx
H dt
|S
||b x g b x g FG dx
H dt
T
1
1 n 1
1 n
n 1
2
2 n 1
2 n
IJ
K
IJ
K
t
(IV.16)
t
n 1
Por outro lado, a implementação implícita continua sendo muito simples, devido à
substituição das derivadas por suas expressões analíticas:
x1 n 1 x1 n x2 n 1 t
R| b g b g b g
S|b x g b x g a b x g
T
t O Lb x g O
LM 1
Na t 1 a t PQMNb x g PQ
2 n 1
2 n
1
1 n 1
1 n 1
1
2 n 1
2
b g t
LM1 0OPLMb x g OP
N0 1QNb x g Q
a2 x2
n 1
(IV.17)
1 n
2 n
VI.2.3. Método de Euler Modificado
O método de Euler modificado tenta melhorar o desempenho do método convencional através
da melhoria da estimativa da derivada. Para isso, a equação (IV.10) será modificada fazendose a derivada igual à média entre a derivada no instante t = t0 e o valor da derivada calculada
para uma estimativa do estado no instante t = t0+ t. Este é o mais simples dos métodos de
integração do tipo preditor-corretor, em que surge um passo de predição do valor do estado no
instante t = t0+ t e este valor é utilizado para a correção e obtenção de um novo valor do
estado neste instante.
O método, portanto, pode ser descrito pelos seguintes passos:
Passo 1: Preditor
dx
(IV.18)
x p t0
t xt
t
dt t0
b
g bg
Passo 2: Corretor
COE754 – Dinâmica e Controle de Sistemas de Potência
VI-6
UNIVERSIDADE FEDERAL DO RIO DE JANEIRO
COPPE – Programa de Engenharia Elétrica
Prof. Glauco Nery Taranto, Ph.D.
[email protected]
Centro de Tecnologia – Ilha do Fundão
tel. 2562-8615 fax: +2562-8628
b
x t0
t
g xbt g 12 LMM dxdt
N
dx p
0
dt
t0
t0
t
OP
PQ
(IV.19)
t
Deve-se notar que a equação (IV.18) corresponde a um passo do método de Euler
convencional, mostrado na equação (IV.10). Já a equação (IV.19) é muito parecida com o
método trapezoidal, sendo a única diferença o cálculo aproximado (a partir da estimativa xp)
da derivada no instante t = t0+ t.
A implementação deste método para a solução do sistema exemplo resulta em
dx1
x1 p
x1 n
t
n 1
dt n
(IV.20)
dx2
x2 p
x2 n
t
n 1
dt n
e, para o passo corretor,
R| d i b g
|S
||d i b g
T
R|
| bx g bx g
S|
||b x g b x g
T
1 n 1
1 n
2 n 1
LM
MN
t L dx
M
2 M dt
N
t dx1
2 dt n
dx2
dt b n
2
2 n
OP
PQ
OP
g PQ
dx1
dt b n 1g p
n
1
(IV.21)
p
Este método também pode ser implementado de forma implícita, substituíndo-se as
expressões das derivadas nas equações (IV.20) e (IV.21):
x1 p
x1 n x2 n t
n 1
(IV.22)
x2 p
x2 n
a1 x1 n a2 x2 n t
R|d i b g b g
S|d i b g b g
T
R| b x g b x g t b x g d x i
2
S|
bT x g b x g 2t a b x g a b x g
b g
n 1
1 n 1
2 n 1
1 n
2 n
2 n
1
2p n 1
1 n
2
d i
a1 x1 p
2 n
n 1
d i
a2 x 2 p
(IV.23)
n 1
Pode-se, ainda, substituir os valores de x1p e x2p, obtidos na equação (IV.22), na equação
(IV.23), resultando em
R|b x g
|S
||b x g
T
1 n 1
2 n 1
LM1 a t OPb x g LM t a t OPbx g
N 2 Q N 2 Q
LM a t a a t OPb x g LM1 a t ba
2 Q
N
N
2
2
1
2
1 n
2 n
2
2
1 2
1
1 n
2
g OPb g
Q
a1 t 2
x2
2
(IV.24)
n
VI.2.4. Método Trapezoidal
O método trapezoidal pode ser interpretado como um refinamento do método de Euler em que
o valor da derivada da função no instante t0 é aproximada pela média entre os valores nos
instantes t0 e t0+ t. A Figura 28 apresenta as grandezas envolvidas no método trapezoidal de
integração numérica.
COE754 – Dinâmica e Controle de Sistemas de Potência
VI-7
UNIVERSIDADE FEDERAL DO RIO DE JANEIRO
COPPE – Programa de Engenharia Elétrica
Prof. Glauco Nery Taranto, Ph.D.
[email protected]
Centro de Tecnologia – Ilha do Fundão
tel. 2562-8615 fax: +2562-8628
0.7
0.6
0.5
x'(t+ t)
x(t)
0.4
0.3
0.2
x'(t)
0.1
0
-0.1
-0.2
0
0.2
0.4
0.6
0.8
1
1.2
t
Figura 28. Método Trapezoidal
O método trapezoidal pode ser descrito, portanto, como
b
x t0
t
L
g xbt g 12 MM dxdtbt g
N
0
t t0
bg
dx t
dt
t t0
t
OP
PQ
t
(IV.25)
e a discretização resultante é da mesma forma mostrada na equação (IV.6), definindo-se
0
1
1
1
0
t
2
0
k
2
3
O método trapezoidal aplicado ao sistema exemplo resulta em
2
3
R| b x g b x g
|S
||b x g b x g
T
1 n 1
2 n 1
1 n
2 n
FG
H
FG
H
t
2
1
k
IJ
K
IJ
K
1 dx1
dx1
t
2 dt n dt n 1
1 dx2
dx2
t
2 dt n dt n 1
(IV.26)
0
(IV.27)
e será necessária uma extrapolação para a determinação das derivadas no instante de tempo
t0+ t. Contudo, substituíndo-se as expressões das derivadas (método implícito), obtém-se
COE754 – Dinâmica e Controle de Sistemas de Potência
VI-8
UNIVERSIDADE FEDERAL DO RIO DE JANEIRO
COPPE – Programa de Engenharia Elétrica
Prof. Glauco Nery Taranto, Ph.D.
[email protected]
Centro de Tecnologia – Ilha do Fundão
tel. 2562-8615 fax: +2562-8628
R| 2 b x g 2 b x g b x g b x g
t
S| 2t
2
T t bx g t bx g a bx g a bx g a bx g a bx g
2
R|
bt x g b x g 2t b x g b x g
S|a x F 2 a I x
F2 I
|T b g GH t JK b g a b x g GH t a JbK x g
LM 2 1 OP Lb x g O LM 2 1 OP Lb x g O
MM at 2 a PP MNb x g PQ MM at 2 a PP MNb x g PQ
t
N t Q
N
Q
1 n 1
1 n
2 n
2 n 1
2 n
1
1 n 1
1
1 n 1
2 n 1
1 n
2
2 n
2 n 1
2
1
1 n
2 n 1
1
2 n 1
1 n
2
(IV.28)
2 n
1 n
2 n 1
2
2
2 n
1 n 1
1
1 n 1
1
2
2 n
Pode-se provar que não existe método de integração A-estável com acurácia maior que aquela
do método trapezoidal [6, 17].
VI.2.5. Método de Runge-Kutta
O método de Runge-Kutta procura uma boa aproximação (linear) para a derivada da função
no intervalo [t0, t0+ t], uma aproximação melhor que aquela utilizada pelo método trapezoidal
(média das derivadas nos extremos do intervalo).
O método de Runge-Kutta pode ser descrito por
x t0
t x t0 R t0 , x t0 , t
(IV.29)
onde a função R é calculada a partir da aproximação para a derivada utilizada e, para
simplificar a implementação explícita do método, não depende do estado no instante final do
intervalo.
As implementações mais usuais do método de Runge-Kutta são as de 2a e de 4a ordens. A
função R é calculada por 2 ou 4 termos, respectivamente.
Para o método de 2a ordem, a expressão de R é dada por
k1 k2
R xn , t
2 2
k1 f xn , tn
t
(IV.30)
b
g bg c bg h
b
g
b g
f bx k , t
g
k2
t
t
n
1 n
Já para o método de 4 ordem, a expressão de R é dada por
k1 2k2 2k3 k4
R xn , tn , t
6
6
6
6
k1 f xn , tn
t
a
b
k2
k3
g
b g
F k , t t IJ t
f Gx
H 2 2K
F k , t t IJ t
f Gx
H 2 2K
f bx k , t
tg t
1
n
n
(IV.31)
2
n
n
k4
n
3 n
Aplicado ao exemplo, o método de Runge-Kutta de 2a ordem resulta em
COE754 – Dinâmica e Controle de Sistemas de Potência
VI-9
UNIVERSIDADE FEDERAL DO RIO DE JANEIRO
COPPE – Programa de Engenharia Elétrica
Prof. Glauco Nery Taranto, Ph.D.
[email protected]
Centro de Tecnologia – Ilha do Fundão
tel. 2562-8615 fax: +2562-8628
R|S b x g b x g b x g t a b x g t
|Tb x g b x g a b x g t a b x g
1 n 1
1 n
2 n 1
2 n
2 n
1
1 n
1
1 n
2
2 n
2
b g
b g
a2 x2 n t 2
t a1 x2 n t 2
b g
a1a2 x1
n
t2
b g
a22 x2
n
t2
(IV.32)
enquanto o método de 4a ordem resulta em equações bastante complicadas, função de
COE754 – Dinâmica e Controle de Sistemas de Potência
VI-10
t4 .
UNIVERSIDADE FEDERAL DO RIO DE JANEIRO
COPPE – Programa de Engenharia Elétrica
Prof. Glauco Nery Taranto, Ph.D.
[email protected]
Centro de Tecnologia – Ilha do Fundão
tel. 2562-8615 fax: +2562-8628
VII. MODELOS DE REGULADORES DE TENSÃO
A função básica de um sistema de excitação é prover corrente contínua para o enrolamento de
campo da máquina síncrona. Além disso, o sistema de excitação desempenha funções de
controle e proteção essenciais para o desempenho satisfatório de um sistema de potência,
através do controle da tensão aplicada ao enrolamento de campo e, portanto, da própria
corrente de campo.
As funções de controle incluem o controle da tensão terminal e da geração de potência
reativa, além de funções próprias para o aumento da estabilidade do sistema. As funções de
proteção estão relacionadas aos limites de capacidade da máquina síncrona e do próprio
sistema de excitação, que não podem ser excedidos.
Os critérios de desempenho de um sistema de excitação são determinados a partir da máquina
síncrona ao qual ele estará conectado, bem como com relação ao próprio sistema de potência
como um todo.
O requisito básico de um sistema de excitação é suprir e ajustar automaticamente a corrente
de campo do gerador síncrono de forma a manter a tensão terminal em um valor de ajuste,
para variações na geração de saída, dentro da capacidade nominal da máquina.
Além disso, o sistema de excitação deve ser capaz de responder a perturbações transitórias,
atuando no campo de maneira consistente com a capacidade instantânea e de curta duração da
máquina. Esta atuação será limitada por diversos fatores como, por exemplo, sobreaquecimentos por excesso de corrente de campo e/ou estator ou por excesso de fluxo
magnético e falha de isolamento devido a sobretensão no enrolamento de campo.
O sistema de excitação deve, ainda, contribuir para o controle de tensão e o aumento da
estabilidade do sistema de potência. Deve responder rapidamente a perturbações para
aumentar a estabilidade transitória (prover torque sincronizante) e deve ser capaz de modular
a corrente de campo para aumentar a estabilidade a pequenas perturbações (prover torque de
amortecimento).
A Figura Error! Bookmark not defined. apresenta os principais blocos funcionais de um
sistema de excitação de um gerador síncrono de grande porte.
A excitatriz é o equipamento responsável por prover a potência (CC) necessária para
alimentar o enrolamento de campo do gerador.
O regulador processa e amplifica sinais de controle para a forma e os níveis necessários para o
controle da excitatriz. Deve incluir a regulação e as funções de estabilização do sistema de
excitação.
O transdutor de tensão incorpora as funções de medição, retificação e filtragem do sinal de
tensão terminal (trifásica alternada). Pode, ainda, incluir a compensação de carga para
permitir o controle de tensões remotas.
O sinal adicional estabilizador é projetado exclusivamente para o amortecimento de
oscilações eletromecânicas, possuíndo um bloco wash-out em sua saída para limitar sua
atuação em baixas freqüências.
Os circuitos limitadores e de proteção envolvem diversas funções visando assegurar a
operação do sistema de excitação e da máquina síncrona dentro de suas capacidades nominais.
COE754 – Dinâmica e Controle de Sistemas de Potência
VII-1
UNIVERSIDADE FEDERAL DO RIO DE JANEIRO
COPPE – Programa de Engenharia Elétrica
Prof. Glauco Nery Taranto, Ph.D.
[email protected]
Centro de Tecnologia – Ilha do Fundão
tel. 2562-8615 fax: +2562-8628
LIMITADORES
E CIRCUITOS
DE PROTEÇÃO
TRANSDUTOR
DE TENSÃO E
COMPENSADOR
DE CARGA
Vref
REGULADOR
EXCITATRIZ
Sistema
de
Potência
GERADOR
SINAL
ADICIONAL
ESTABILIZADOR
(PSS)
Figura 29. Diagrama de Blocos das Funções Básicas de um Sistema de Excitação
Os sistemas de excitação evoluíram significativamente ao longo dos anos, correspondendo a
um aumento sistemático de sua influência no desempenho dinâmico de um sistema de
potência. Os sistemas de excitação podem ser classificados, de maneira geral, segundo a fonte
de potência utilizada:
Sistemas de excitação CC (DC)
Sistemas de excitação CA (AC)
Sistemas de excitação estáticos (ST)
A Tabela I mostra as características dos sistemas de excitação.
Tabela I – Características dos Sistemas de Excitação
Categoria
Tipo da Excitatriz
Gerador DC com comutador
DC
AC
ST
Alternador com retificador
rotativo não controlado
(brushless)
Alternador com retificador
estacionário não controlado
Alternador com retificador
estacionário controlado
Fonte de tensão com
retificador controlado
Fonte composta com
retificador não controlado
Fonte composta com
retificador controlado
Fonte de Potência da
Excitatriz
Grupo motor-gerador ou
eixo da máquina
Eixo da máquina
Tensão de armadura da
máquina síncrona ou
tensão de barra auxiliar
Tensão e corrente da
máquina síncrona
Resposta Inicial
Rápida?
não
não
não
não
sim
Modelo
IEEE
DC1
DC2
DC3
AC1
AC2
não
AC3
sim
AC4
sim
ST1
não
ST2
sim
ST3
A Figura Error! Bookmark not defined. apresenta um diagrama esquemático simplificado
de um sistema de excitação CC. Uma máquina CC especial, conhecida como amplidyne é
utilizada como regulador de tensão, controlando a corrente de campo de um gerador CC, que
fornece corrente para o campo do gerador através de anéis coletores.
COE754 – Dinâmica e Controle de Sistemas de Potência
VII-2
UNIVERSIDADE FEDERAL DO RIO DE JANEIRO
COPPE – Programa de Engenharia Elétrica
Prof. Glauco Nery Taranto, Ph.D.
[email protected]
Centro de Tecnologia – Ilha do Fundão
tel. 2562-8615 fax: +2562-8628
am plidyne
excitatriz CC
cam po arm adura
gerador CA
cam po arm adura
TC
:
anel
reostato
de campo
TP
regulador
de tensão
Figura 30. Sistema de Excitação CC
Este tipo de sistema de excitação foi muito empregado até a década de 60, quando os sistemas
de excitação CA passaram a dominar o cenário. A presença do anel coletor representa uma
grande dificuldade técnica do ponto de vista de manutenção e confiabilidade.
A Figura Error! Bookmark not defined. apresenta um diagrama simplificado de um sistema
de excitação CA. A tensão (e corrente) CC do campo do gerador é fornecida a partir de um
retificador na saída da excitatriz. Os primeiros sistemas de excitação CA utilizavam um
retificador estacionário e, portanto, a corrente de campo deve ser fornecida ao gerador através
de anéis coletores.
excitatriz CA
cam po arm adura
cam po
gerador CA
arm adura
TC
:
anel
regulador
CC
regulador
CA
TP
referência
CC
referência
CA
Figura 31. Sistema de Excitação CA
A Figura Error! Bookmark not defined. apresenta o diagrama de um sistema de excitação
CA sem anéis (brushless) dotado de excitatriz piloto. Este sistema de excitação utiliza uma
excitatriz CA montada no eixo do rotor, cujo enrolamento de campo se encontra montado no
estator. A excitatriz piloto tem a função de fornecer corrente de campo CC para a excitatriz
CA e é, em geral, um gerador CC com ímãs permanentes, cujo campo se encontra no rotor e a
armadura no estator. Uma limitação desse tipo de excitatriz é que a corrente suprida ao
gerador só pode ser controlada indiretamente via controle de campo da excitatriz. Isso tende a
introduzir uma constante de tempo entre os valores de 0,5 e 1,0 segundo no sistema de
controle da excitatriz. A presença desse atraso pode prejudicar a estabilização em casos com a
presença de modos eletromecânicos intra-planta (aprox. 3Hz).
Uma possível solução para esse problema é o uso de tiristores no lugar dos diodos, passandose a fazer o controle via ângulo de disparo dos tiristores. Porém controlar o ângulo de disparo
de tiristores rotativos não é fácil comprometendo a confiabilidade do sistema.
COE754 – Dinâmica e Controle de Sistemas de Potência
VII-3
UNIVERSIDADE FEDERAL DO RIO DE JANEIRO
COPPE – Programa de Engenharia Elétrica
Prof. Glauco Nery Taranto, Ph.D.
[email protected]
Centro de Tecnologia – Ilha do Fundão
tel. 2562-8615 fax: +2562-8628
excitatriz piloto
arm adura
excitatriz CA
arm adura
cam po
gerador CA
arm adura
cam po
N
TC
S
:
cam po
TP
CA trifásica
regulador
CA
referência
CA
Figura 32. Sistema de Excitação Brushless com Excitatriz Piloto
Os sistemas de excitação estáticos, como o próprio nome já diz, utiliza apenas equipamentos
eletrônicos para produzir a tensão (e a corrente) CC que alimenta o campo do gerador.
Utiliza-se, em geral, um retificador controlado que alimenta o campo através de anéis
coletores. A Figura 18 mostra o sistema de excitação estático (ST1) com fonte de tensão e
retificador controlado.
Figura 33. Sistema de Excitação Estático (ST1)
Na sua forma mais simples, a tensão trifásica do gerador (ou de uma barra auxiliar) é
retificada para alimentar o campo. Este arranjo, contudo, depende do nível de tensão CA
disponível para retificação, sofrendo sérias limitações durante defeitos em que esta tensão
pode ficar muito baixa. Este efeito pode ser parcialmente compensado utilizando-se uma fonte
de tensão para o retificador que seja proporcional à tensão e à corrente terminal do gerador,
garantindo-se, assim, a alimentação do campo durante os defeitos. Em sistemas industriais,
particularmente, esse mecanismo de compensação é conhecido com o jargão de
compoudagem, que na realidade é um transformador de corrente cujo secundário está
COE754 – Dinâmica e Controle de Sistemas de Potência
VII-4
UNIVERSIDADE FEDERAL DO RIO DE JANEIRO
COPPE – Programa de Engenharia Elétrica
Prof. Glauco Nery Taranto, Ph.D.
[email protected]
Centro de Tecnologia – Ilha do Fundão
tel. 2562-8615 fax: +2562-8628
conectado em série com o secundário do transformador de excitação, complementando a
corrente de campo do gerador. O transformador de compoudagem tem basicamente duas
funções, ou seja:
1. manter a tensão do gerador alta o suficiente, para que durante a ocorrência de um curtocircuito, seja mantida a corrente de curto durante o tempo necessário para que haja o
desligamento seletivo pela proteção;
2. manter a excitação do gerador, quando em casos de defeitos próximos aos terminais da
máquina, e a tensão da mesma cair muito (por exemplo abaixo de 30% do valor nominal),
evitando o bloqueio da excitação automática do sistema, até a atuação do sistema de
proteção.
A Figura 19 mostra o sistema de excitação com compoundagem, onde são destacadas 5 partes
principais:
A - Transformador de Excitação
B - Unidade de Controle Automático e Manual
C - Estágio dos SCR de Potência
D – Compoundagem
E - Excitação Inicial, Excitação e Equipamentos de Descarga Rápida.
Figura 19. Sistema de Excitação mostrando os transformadores de excitação e de
compoundagem (cortesia REPAR)
COE754 – Dinâmica e Controle de Sistemas de Potência
VII-5
UNIVERSIDADE FEDERAL DO RIO DE JANEIRO
COPPE – Programa de Engenharia Elétrica
Prof. Glauco Nery Taranto, Ph.D.
[email protected]
Centro de Tecnologia – Ilha do Fundão
tel. 2562-8615 fax: +2562-8628
VII.1 Características Práticas3
As características descritas a seguir se referem à nomenclatura mostrada na Figura 19.
AVR - Transformador de Excitação e Compound
Transformador de Excitação (T01):
É o transformador que conectado aos terminais da máquina, em conjunto com o
transformador compound, ajusta a tensão de excitação a níveis adequados que fornecem a
potência necessária para a excitação.
Na verdade, é um transformador que em geral, abaixa a tensão de 13,8 kV para 108 V, para
em conjunto com o transformador compound, fazer alimentação do conjunto de SCR de
potência que vai alimentar o campo do gerador.
Figura 20 Transformador de excitação (T01)
Transformador de Compoudagem ( T02 ):
O transformador de Compoudagem tem basicamente duas funções, ou seja:
a) Manter a tensão do gerador alta o suficiente, para que durante a ocorrência de um
curto-circuito, seja mantida a corrente de curto, durante o tempo necessário para que
haja o desligamento seletivo da proteção.
b) Manter a excitação do gerador, quando em casos de defeitos próximos aos terminais
da máquina, e a tensão da mesma cair abaixo de 30% do valor nominal, evitando o
bloqueio da excitação automática do sistema, até a atuação do sistema de proteção.
A Compoudagem basicamente consiste em um grupo de transformadores de corrente,
ligados em triângulo, cujos secundários estão conectados em série com o secundário do
transformador de excitação, complementando a corrente de campo do gerador.
3
Essa seção é cortesia da Petrobras e foi retirada do Caderno – Sistema: Geração de Energia Elétrica –
Geradores; Subsistema: Gerador e Auxiliares; Requisito: Operar Sistema de Excitação. O Caderno foi fruto de
um projeto Coppetec com o Abaste com informações disponibilizadas pela Petrobras, com o intuito de ser usado
na certificação de operadores.
COE754 – Dinâmica e Controle de Sistemas de Potência
VII-6
UNIVERSIDADE FEDERAL DO RIO DE JANEIRO
COPPE – Programa de Engenharia Elétrica
Prof. Glauco Nery Taranto, Ph.D.
[email protected]
Centro de Tecnologia – Ilha do Fundão
tel. 2562-8615 fax: +2562-8628
Figura 21 Transformador de compoudagem (T02)
O transformador de excitação, em conjunto com o transformador compound, ajusta a
tensão de excitação a níveis adequados.
Também servem como reatância de comutação para os tiristores e como um isolador
de potencial entre a rede e o circuito de excitação.
Além disso, servem como um limitador de corrente que torna possível manter sob
controle, qualquer curto-circuito no circuito de excitação.
AVR - Unidade de Controle Automático e Manual
Esta unidade é que irá controlar os disparos dos SCR, controlando assim a corrente de
excitação do gerador e, conseqüentemente a tensão ou carga reativa de acordo com a condição
em que o mesmo estiver operando.
Modo de Operação "Automático":
No modo de operação "automático", o sistema compara a tensão de saída do gerador
com o valor de referência pré-fixado e, caso haja diferença os disparos dos SCR são alterados
(o que altera a corrente de excitação) até que se consiga nos terminais da máquina, a tensão
desejada. Na operação em automático, pode-se variar a tensão da máquina manualmente, mas
somente entre os valores de 90 a 110% da tensão nominal, através do console do SCMD4, ou
da chave de variação da mesa de controle, ou diretamente no painel de excitação do AVR,
através dos botões de aumentar ou diminuir do canal automático.
Quando se atua nestes dispositivos, o que se faz na verdade, é alterar o valor de
referência pré-fixado.
Modo de Operação "Manual":
4
Mnemônico utilizado pela Petrobras para se referir ao Sistema de Controle e Monitoração Distribuído.
Fazendo-se um paralelo com o SEP é uma espécie de SCADA + EMS.
COE754 – Dinâmica e Controle de Sistemas de Potência
VII-7
UNIVERSIDADE FEDERAL DO RIO DE JANEIRO
COPPE – Programa de Engenharia Elétrica
Prof. Glauco Nery Taranto, Ph.D.
[email protected]
Centro de Tecnologia – Ilha do Fundão
tel. 2562-8615 fax: +2562-8628
No modo de operação "manual", os disparos dos SCR são controlados de acordo com
o valor de referência pré-fixado. Neste modo de operação pode-se variar a tensão de saída de
zero até o máximo, atuando no console do SCMD, ou na chave de variação da mesa de
controle, ou diretamente no painel de excitação do AVR, através dos botões de aumentar ou
diminuir do canal manual.
Estas atuações na verdade alteram o valor de referência pré-fixado, que altera os
disparos dos SCR, que por sua vez alteram a corrente de excitação.
A seleção do modo de operação automático ou manual, somente pode ser feita no
painel de excitação. Esta passagem pode ser feita com a máquina operando ou sob qualquer
condição, e inclusive é feita automaticamente a passagem do modo automático para o modo
manual, quando ocorre algum problema com o sistema automático. Um sistema automático
compara a saída dos dois canais, automático e manual, e caso haja diferença entre eles, e a
máquina esteja operando em automático, este sistema arrasta o canal manual para o mesmo
ponto de operação do canal automático. Assim se houver uma mudança para manual, o
gerador não sofrerá grandes variações de tensão ou de carga reativa.
AVR - Geração da Referência do AVR (Setpoint)
Geração do Setpoint do AVR:
O valor de setpoint do AVR é influenciado por várias características. Ele pode ser
aumentado, diminuído ou rearmado para um valor pré-ajustado, usando uma das três entradas
digitais, normalmente disponíveis. O tempo de excursão do limite mínimo ao máximo pode
ser ajustado independentemente da faixa da referência. Existem dois limites mínimos
ajustáveis. Além disso, o setpoint é influenciado por outras características, como estatismo,
softstart e limitador V/Hz, conforme descrito a seguir :
Compensação de Potência Ativa e Reativa (Estatismo):
O sistema de controle gera um sinal proporcional à potência ativa ou reativa, que é
adicionado ao valor de setpoint. O motivo é a compensação da queda de tensão causada pela
potência ativa ou reativa, através da impedância dos barramentos, cabos dos alimentadores e
transformadores no sistema de distribuição. O sinal de potência reativa Q é somente
necessário para operação em paralelo de dois ou mais geradores conectados ao mesmo
barramento. Neste caso, o sinal Q-static deverá reduzir o setpoint do AVR proporcionalmente
ao aumento da potência reativa. A influência estática sobre o AVR é aplicada quando o
disjuntor do gerador está ligado.
Estes parâmetros podem ser ligados ou desligados e ajustados entre -20% até +20%, sendo
que os ajustes de estatismo para potência ativa e reativa estão ligados em 2,5%.
Soft-start:
COE754 – Dinâmica e Controle de Sistemas de Potência
VII-8
UNIVERSIDADE FEDERAL DO RIO DE JANEIRO
COPPE – Programa de Engenharia Elétrica
Prof. Glauco Nery Taranto, Ph.D.
[email protected]
Centro de Tecnologia – Ilha do Fundão
tel. 2562-8615 fax: +2562-8628
A função soft-start evita sobretensão na tensão terminal do gerador, quando a
excitação inicial é ligada (escorvamento).
No momento em que a excitação é ligada, o sistema de excitação inicial aumenta a
corrente de campo. Quando a tensão do gerador atinge 40% do seu valor nominal, a função
soft-start assume o controle da tensão do gerador e libera sua elevação num tempo que pode
ser ajustado entre 0 e 65 segundos. É dada prioridade a este sinal até que seu valor exceda o
sinal do gerador de setpoint.
Figura 22 Soft-start
Limitador V/Hz:
O limitador V/Hz é usado para evitar sobrefluxo dos transformadores. Se o valor de
referência do AVR é muito alto para uma dada freqüência, a referência será reduzida de
acordo com uma característica pré-ajustada V/Hz (freqüência menor que 54 Hz a tensão de
saída do gerador é diminuída proporcionalmente à freqüência). O limitador torna-se ativo
após uma temporização pré-ajustada de, por exemplo, 5 segundos.
A característica V/Hz pode ser ajustada com parâmetros entre -200% até +200%,
estando ajustado em 120%. O parâmetro V/fn (tensão do gerador na freqüência nominal)
determina o centro de rotação da característica. O parâmetro V/Hz-gradiente determina a
inclinação da característica.
COE754 – Dinâmica e Controle de Sistemas de Potência
VII-9
UNIVERSIDADE FEDERAL DO RIO DE JANEIRO
COPPE – Programa de Engenharia Elétrica
Prof. Glauco Nery Taranto, Ph.D.
[email protected]
Centro de Tecnologia – Ilha do Fundão
tel. 2562-8615 fax: +2562-8628
Figura 23 Tensão / freqüência
AVR - Estágio de Potência:
O estágio de potência consiste de dois conjuntos de SCR ligados em ponte trifásica,
alimentadas pelos transformadores de excitação e compound, controladas pelos canais
automático ou manual.
Sua função é fornecer corrente contínua controlada para o campo do gerador.
Somente um conjunto de SCR é necessário para a operação do gerador a plena carga,
ficando o outro conjunto na reserva, que em caso de defeito no que está operando o reserva
entra em operação sem que ocorra falta de corrente de excitação para o gerador.
Cada conjunto de SCR é refrigerado por um ventilador, que deverá operar continuamente
quando estiver fornecendo corrente de excitação para o gerador.
Figura 24 Estágio de potência
Este sistema recebe alimentação dos transformadores de excitação e compound,
fornece energia para o campo do gerador, e é controlado pela unidade de controle
automático/manual.
COE754 – Dinâmica e Controle de Sistemas de Potência
VII-10
UNIVERSIDADE FEDERAL DO RIO DE JANEIRO
COPPE – Programa de Engenharia Elétrica
Prof. Glauco Nery Taranto, Ph.D.
[email protected]
Centro de Tecnologia – Ilha do Fundão
tel. 2562-8615 fax: +2562-8628
Consiste de ponte trifásica de SCR. Poder-se-ia usar ponte de diodos, mas estes não
permitem controle nenhum, enquanto os SCR propiciam ampla faixa de controle. Alterando
os pulsos (adiantando ou atrasando-os) aumenta-se ou diminui-se a corrente do campo.
É importante observar que somente dois SCR conduzem a cada vez, e que eles
recebem sinal para a condução sempre no mesmo ponto de onda, o que faz aparecer uma onda
de corrente contínua uniforme.
Figura 25 Ponte trifásica
Figura 26 Saída da ponte trifásica
COE754 – Dinâmica e Controle de Sistemas de Potência
VII-11
UNIVERSIDADE FEDERAL DO RIO DE JANEIRO
COPPE – Programa de Engenharia Elétrica
Prof. Glauco Nery Taranto, Ph.D.
[email protected]
Centro de Tecnologia – Ilha do Fundão
tel. 2562-8615 fax: +2562-8628
Como pode ser visto na Figura 26, há uma comutação a cada 60°, ou seja a cada 2,78
ms, para o sistema trifásico 60 Hz.
Então deverá ser dado um pulso a cada 2,78 ms, obedecendo a seqüência de fases,
para que os SCR possam disparar e alimentar o campo do gerador.
Observando a Figura 26 vê-se que:
- No tempo t1 conduzem R+ e S- No tempo t2 conduzem R+ e T- No tempo t3 conduzem S+ e T- No tempo t4 conduzem S+ e R- No tempo t5 conduzem T+ e R- No tempo t6 conduzem T+ e SContinuando o raciocínio vê-se que a seqüência de pulsos para os seis SCR é a seguinte:
R+ , T- , S+ , R- , T+ , S- , R+ , TConfirmando a seqüência, haverá sempre uma repetição.
Observe a representação da seqüência
de pulsos abaixo:
Característica dos pulsos nos SCR.
Se fosse dado apenas um pulso para cada SCR, mesmo obedecendo a seqüência, não
seria possível dar partida no sistema, pois na partida, dois SCR necessitam ser disparados ao
mesmo tempo.
Então, por simplicidade de circuitos, usa-se o tempo todo o sistema chamado duplo
impulso. Como já foi dito anteriormente, um atraso ou avanço na seqüência de pulsos,
aumenta ou diminui a corrente contínua fornecida ao campo do gerador, o que irá aumentar
ou diminuir a tensão ou a carga reativa do mesmo.
Então, basicamente, todo o controle exercido sobre o sistema, é feito sobre a seqüência
de pulsos de disparo dos SCR, seja na operação em automático ou em manual.
AVR – Excitação Inicial:
COE754 – Dinâmica e Controle de Sistemas de Potência
VII-12
UNIVERSIDADE FEDERAL DO RIO DE JANEIRO
COPPE – Programa de Engenharia Elétrica
Prof. Glauco Nery Taranto, Ph.D.
[email protected]
Centro de Tecnologia – Ilha do Fundão
tel. 2562-8615 fax: +2562-8628
Quando o sistema é de excitatriz estática, alimentada pelo próprio gerador, o conjunto
necessita de excitação inicial. Em sistemas de excitação shunt (transformador de excitação
conectado aos terminais do gerador), o gerador não possui suficiente tensão residual para
elevar sua tensão, via conversor. Neste caso, torna-se necessário o circuito de excitação inicial
(Parte E da Figura 19). Este circuito consiste de um contator de excitação inicial (-Q03) uma
ponte de diodos (-V03), e um transfomador (T03) de 480/15 V para adaptar a tensão de
entrada auxiliar à tensão necessária para a excitação inicial do campo.
O escorvamento ocorre conforme os seguintes passos:
Liga-se o disjuntor de campo.
Liga-se a excitação, fechando-se o contator (-Q03) de excitação inicial (escorvamento)
A corrente de excitação de partida flui pelo rotor, elevando a tensão do gerador para
cerca de 20% da tensão nominal.
Acima de 10% da tensão nominal, são liberados os pulsos de disparo para os tiristores
dos conversores (Ponte 1 ou Ponte 2) e ele começa a excitar o gerador até sua tensão
nominal.
Acima de 40% da tensão nominal, o contator de excitação inicial abre-se (sem
corrente, pois agora o conversor é a fonte de alimentação do campo). A ponte de
diodos (-V03) no circuito de escorvamento evita um fluxo de corrente para a fonte de
escorvamento, enquanto o contator de escorvamento está fechado.
Quando o gerador estiver em carga, o sistema de excitação passa a receber uma
contribuição vinda da compoudagem.
AVR – Equipamentos de Descarga Rápida (Crowbar):
Na abertura do disjuntor de campo, a energia armazenada nos enrolamentos do campo
da máquina, deve ser dissipada rapidamente, pois caso contrário ela manteria a tensão do
gerador ainda por algum tempo, e provocaria o aparecimento de arco-elétrico entre os
contatos do disjuntor de campo, dificultando a interrupção da corrente elétrica de excitação e
danificando os contatos do disjuntor. Por esta razão, quando o disjuntor do campo (-Q02)
abre, antes dessa abertura, primeiro se fecha o disjuntor auxiliar (-F02) que curto-circuita o
campo da máquina, descarregando-o através da resistência R2.
Existe ainda um sistema estático, composto por SCR (F02 - proteção de sobre tensão
no rotor "Crowbar"), para curto-circuitar o campo através de R2, quando se deseja
descarregá-lo rapidamente (caso por exemplo de defeitos internos no gerador, etc).
COE754 – Dinâmica e Controle de Sistemas de Potência
VII-13
UNIVERSIDADE FEDERAL DO RIO DE JANEIRO
COPPE – Programa de Engenharia Elétrica
Prof. Glauco Nery Taranto, Ph.D.
[email protected]
Centro de Tecnologia – Ilha do Fundão
tel. 2562-8615 fax: +2562-8628
VII.2 Representação Computacional
A correta modelagem dinâmica dos sistemas de excitação é uma das principais tarefas
associadas aos estudos de estabilidade transitória. A enorme diversidade de modelos e de
funções desempenhadas pelos sistemas de excitação tornam esta tarefa bastante artesanal e
dependente de informações dos fabricantes e/ou ensaios de campo.
Para situações em que o sistema de excitação específico não é conhecido, como por exemplo
nos estudos de Planejamento, quando estes ainda não foram especificados, é comum utilizarse modelos genéricos para representar os sistemas de excitação.
A Figura 31 apresenta a estrutura geral de um modelo completo de sistema de excitação. Este
modelo mantém a identidade de cada componente do sistema de excitação e tem a vantagem
de tornar mais fácil a determinação de parâmetros, que mantêm seu significado físico original.
Contudo, este modelo é considerado muito detalhado para estudos de estabilidade,
especialmente aqueles associados com o desempenho do sistema de potência como um todo.
Modelos reduzidos são obtidos, então, procurando-se manter as características dinâmicas da
resposta do sistema de excitação na faixa de freqüências de 0 Hz a cerca de 3 Hz, associada
aos transitórios eletromecânicos.
Vref
estágios amplificadores
|V|
+
+
+
+
-
+
-
G1
G2
H1
laços internos de
estabilização
excitatriz
G3
-
Vpss
H2
laço de estabilização
principal
H3
Figura 27. Estrutura de um Modelo de Sistema de Excitação
A maior parte dos sistemas de excitação do sistema brasileiro se encontra modelado e
disponível para uso nos programas de análise da estabilidade, com os modelos e seus
parâmetros tendo sido objeto de grandes estudos e debates.
Na ausência de um modelo definido, o IEEE possui trabalhos publicados com modelos padrão
sugeridos para diversos tipos de sistemas de excitação [12, 16], que podem ser utilizados ou
adaptados para as necessidades do estudo a ser realizado.
As Figs. 28 a 32 mostram alguns dos modelos de sistemas de controle de excitação de
máquinas síncronas do padrão IEEE. A Fig. 28 mostra o modelo DC2A usado para
representar excitatrizes rotativas via gerador CC. Cabe salientar que nesse modelo o limite de
saída do regulador de tensão é proporcional à tensão terminal do gerador.
COE754 – Dinâmica e Controle de Sistemas de Potência
VII-14
UNIVERSIDADE FEDERAL DO RIO DE JANEIRO
COPPE – Programa de Engenharia Elétrica
Prof. Glauco Nery Taranto, Ph.D.
[email protected]
Centro de Tecnologia – Ilha do Fundão
tel. 2562-8615 fax: +2562-8628
Figura 28. Modelo DC2A do IEEE
As Figs. 29 e 30 mostram dois tipos de sistemas de excitação padrão IEEE que usam um
gerador CA e retificadores tanto rotativos (brushless) quanto estáticos que produzem o campo
CC.
Figura 29. Modelo AC1A do IEEE
Figura 30. Modelo AC4A do IEEE
COE754 – Dinâmica e Controle de Sistemas de Potência
VII-15
UNIVERSIDADE FEDERAL DO RIO DE JANEIRO
COPPE – Programa de Engenharia Elétrica
Prof. Glauco Nery Taranto, Ph.D.
[email protected]
Centro de Tecnologia – Ilha do Fundão
tel. 2562-8615 fax: +2562-8628
Figura 31. Modelo ST1 do IEEE
Figura 32. Modelo ST1A do IEEE
COE754 – Dinâmica e Controle de Sistemas de Potência
VII-16
UNIVERSIDADE FEDERAL DO RIO DE JANEIRO
COPPE – Programa de Engenharia Elétrica
Prof. Glauco Nery Taranto, Ph.D.
[email protected]
Centro de Tecnologia – Ilha do Fundão
tel. 2562-8615 fax: +2562-8628
VIII. REGULAÇÃO DE VELOCIDADE5
VIII.1 Introdução
O controle carga-freqüência em um sistema de potência é subdividido em regulação primária
e regulação secundária. A regulação primária tem como objetivo manter os desvios de
freqüência em valores mínimos sem perda da estabilidade. Para isso, os reguladores de
velocidade são os sistemas de controle utilizados nesta tarefa. A regulação automática de
velocidade atua no sentido de elevar ou reduzir a potência da unidade geradora, quando a
freqüência se afasta da freqüência nominal (60 Hz no caso brasileiro).
A regulação secundária do controle carga-freqüência pode ser considerada como uma
regulação quasi-estática se comparada à regulação primária. A regulação secundária é
usualmente conhecida como Controle Automático da Geração (CAG). As constantes de
tempo podem chegar, por exemplo, a algumas ordens de magnitude maiores que as constantes
de tempo do problema de oscilações eletromecânicas. A regulação secundária tem como
objetivo corrigir os erros de freqüência, por ventura deixados pela regulação primária, quando
um novo ponto de equilíbrio é atingido após uma perturbação no sistema. A regulação
secundária pode ter também como objetivo a manutenção do intercâmbio entre áreas de
controle em valores contratuais.
VIII.2 Conceitos Básicos
Todo sistema de potência tem uma capacidade inerente de alcançar um novo estado de
equilíbrio carga - geração. Isto se explica pelo fato da carga ser variável com a freqüência, e
portanto, em geral, quando a freqüência decai também decai o valor absoluto da carga,
indicando uma tendência do próprio sistema de se auto-regular, ou seja, de atingir um novo
estado de equilíbrio.
Esta propriedade é denominada de Regulação Própria do Sistema, e se expressa através de
um parâmetro D, chamado de Coeficiente de Amortecimento.
Podemos então verificar que após um aumento de carga
freqüência f onde:
f
Pd chegaremos a uma variação de
Pd
D
(1)
A Figura VIII.1 mostra uma curva representativa da variação da carga com a freqüência.
5
Algumas figuras dessa seção foram retiradas do livro “Operação de Sistemas de Potência com Controle
Automático de Geração,” Xisto Vieira Filho, Editora Campus, 1984.
COE754 – Dinâmica e Controle de Sistemas de Potência
VIII-1
UNIVERSIDADE FEDERAL DO RIO DE JANEIRO
COPPE – Programa de Engenharia Elétrica
Prof. Glauco Nery Taranto, Ph.D.
[email protected]
Centro de Tecnologia – Ilha do Fundão
tel. 2562-8615 fax: +2562-8628
Figura VIII.1 – Curva da variação da carga com a freqüência
Em um sistema de potência de grande porte como o brasileiro, as variações de carga ( Pd )
podem atingir valores consideráveis. Por outro lado, valores típicos de D para tais sistemas
são relativamente baixos (D=1%, por exemplo), mostrando que variações inadmissíveis de
freqüência podem ser alcançadas. Este fato nos mostra a necessidade de um controle que faça
com que seja balanceada a geração e a carga do sistema de potência.
Neste ponto podemos identificar um primeiro objetivo para o sistema de controle, à saber:
manter a freqüência do sistema de potência constante a maior parte do tempo possível.
VIII.3 Regulação Primária
Foi visto que quando se verifica um desequilíbrio instantâneo carga-geração torna-se
necessária a atuação de um controle para auxiliar na condução do sistema a um estado de
equilíbrio mais favorável.
Por esta razão as unidades geradoras são dotadas de mecanismos de regulação de velocidade
automática, que atuam no sentido de aumentar ou diminuir a potência gerada, quando a
velocidade (ou freqüência) se afasta da velocidade de referência. Esta regulação automática de
velocidade é denominada Regulação Primária.
Podemos observar que o controle de freqüência é feito através da variação de potência ativa
das máquinas do sistema.
A Error! Reference source not found. mostra a atuação de uma malha de controle de
potência ativa e de uma malha de controle de potência reativa de uma máquina do sistema.
COE754 – Dinâmica e Controle de Sistemas de Potência
VIII-2
UNIVERSIDADE FEDERAL DO RIO DE JANEIRO
COPPE – Programa de Engenharia Elétrica
Prof. Glauco Nery Taranto, Ph.D.
[email protected]
Centro de Tecnologia – Ilha do Fundão
tel. 2562-8615 fax: +2562-8628
Figura VIII.2 - Malhas de controle de uma máquina do sistema
VIII.4 Regulador Isócrono
Um regulador isócrono tem seu funcionamento como um integrador, como mostrado na
Error! Reference source not found..
f
K
s
P
Figura VIII.3 - Integrador
Dessa forma, somente cessará a sua atuação, ou seja, P 0 , quando a freqüência retornar
rigorosamente ao seu valor original (60Hz), característica de um integrador matemático.
A Error! Reference source not found. mostra a resposta no tempo de uma unidade geradora,
dotada de um regulador isócrono, quando submetida a um aumento de carga.
COE754 – Dinâmica e Controle de Sistemas de Potência
VIII-3
UNIVERSIDADE FEDERAL DO RIO DE JANEIRO
COPPE – Programa de Engenharia Elétrica
Prof. Glauco Nery Taranto, Ph.D.
[email protected]
Centro de Tecnologia – Ilha do Fundão
tel. 2562-8615 fax: +2562-8628
Figura VIII.4 - Resposta no tempo de uma unidade geradora
com regulador isócrono
Um aumento na carga faz com que a freqüência (ou velocidade do rotor) decaia. Com a queda
da freqüência, a potência mecânica do gerador começa a aumentar. Este aumento causa uma
diminuição na taxa de decaimento da freqüência, até o ponto em que a freqüência começa a
aumentar e atinge o seu valor nominal. Neste ponto o valor em regime do aumento de
potência mecânica do gerador é igual ao aumento de carga.
Em sistemas de potência com mais de uma unidade geradora suprindo as diversas cargas, este
tipo de regulador embora apresente a vantagem de fazer com que a freqüência retorne ao seu
valor original, traz sérios problemas de instabilidade e impossibilidade de repartição adequada
de carga entre as unidades geradoras.
VIII.5 Regulador com Queda de Velocidade
Para que se tenha uma divisão estável da carga entre duas ou mais unidades geradoras
operando em paralelo, os reguladores destas unidades devem apresentar uma característica de
queda de velocidade ou estatismo (R).
Esta característica de regulação pode ser obtida adicionando-se um sinal de realimentação em
paralelo ao integrador da Error! Reference source not found., como é mostrado na Error!
Reference source not found..
f
K
P
s
R
COE754 – Dinâmica e Controle de Sistemas de Potência
VIII-4
UNIVERSIDADE FEDERAL DO RIO DE JANEIRO
COPPE – Programa de Engenharia Elétrica
Prof. Glauco Nery Taranto, Ph.D.
[email protected]
Centro de Tecnologia – Ilha do Fundão
tel. 2562-8615 fax: +2562-8628
Figura VIII.5 - Regulador com estatismo
Este tipo de regulador portanto apresenta um erro de
P
1
em regime permanente, ou seja,
R
1
f (em regime permanente).
R
A relação anterior pode ser reescrita da seguinte forma:
PG
PG 0
1
(f
R
f0 ) 0
(2)
Esta equação corresponde à equação de uma reta como indicado na Error! Reference source
not found..
Figura VIII.6 - Característica f x P
A Error! Reference source not found. mostra a resposta no tempo de uma unidade geradora,
dotada de um regulador com estatismo, quando submetida a um aumento de carga.
COE754 – Dinâmica e Controle de Sistemas de Potência
VIII-5
UNIVERSIDADE FEDERAL DO RIO DE JANEIRO
COPPE – Programa de Engenharia Elétrica
Prof. Glauco Nery Taranto, Ph.D.
[email protected]
Centro de Tecnologia – Ilha do Fundão
tel. 2562-8615 fax: +2562-8628
Figura VIII.7 - Resposta no tempo de uma unidade geradora
com regulador com estatismo
Se duas ou mais unidades geradoras dotadas de reguladores com estatismo estão conectadas a
um mesmo sistema de potência, existirá somente um único valor de freqüência para o qual as
unidades dividirão o aumento de carga.
A Error! Reference source not found. apresenta duas unidades geradoras com estatismos
R1 e R2 respectivamente. Inicialmente o sistema está operando a uma freqüência nominal f 0 ,
e cada máquina gerando P1 e P2 . Quando temos um aumento de carga Pd os reguladores
farão com que a potência mecânica de cada gerador aumente até se atingir um novo ponto de
equilíbrio com um novo valor de freqüência. A parcela do aumento de geração que cada
gerador absorverá, dependerá do estatismo de cada máquina e pode ser calculado através das
relações:
P1
P1'
P1
f
R1
(3)
P2
P2'
P2
f
R2
(4)
Onde,
P1
P2
COE754 – Dinâmica e Controle de Sistemas de Potência
Pd
(5)
VIII-6
UNIVERSIDADE FEDERAL DO RIO DE JANEIRO
COPPE – Programa de Engenharia Elétrica
Prof. Glauco Nery Taranto, Ph.D.
[email protected]
Centro de Tecnologia – Ilha do Fundão
tel. 2562-8615 fax: +2562-8628
Figura VIII.8 - Divisão de carga por duas unidades dotadas de
reguladores com estatismo
A utilização de reguladores com estatismo supera os inconvenientes dos reguladores
isócronos, ou seja, os problemas de estabilidade e de repartição de carga. No entanto traz um
problema adicional, que é o afastamento, em regime permanente, da freqüência original.
Este desvio de freqüência em regime permanente cria a necessidade de um segundo estágio de
regulação, que constitui a chamada Regulação Secundária.
VIII.6 Regulação Secundária
No item Error! Reference source not found. foi verificado que com a atuação de um
regulador de velocidade com estatismo, um impacto de carga em um sistema de potência
provoca no mesmo uma variação de freqüência em regime transitório, e que após terminados
estes transitórios a freqüência se estabilizava em um novo valor, diferente da freqüência
nominal. Se nenhuma providência adicional fosse tomada poderíamos ter níveis de variação
de freqüência inaceitáveis.
A restauração da freqüência do sistema para seu valor nominal requer então uma ação de
controle suplementar. Este controle suplementar constitui a chamada Regulação Secundária
que tem sua ação através do ajuste de um sinal de referência no regulador de velocidade.
A Error! Reference source not found. mostra o regulador de velocidade com o sinal de
referência.
f ref
f
f cag
1
R
1
1 s TG
Pmec
Figura VIII.9 - Regulador de velocidade com regulação secundária
COE754 – Dinâmica e Controle de Sistemas de Potência
VIII-7
UNIVERSIDADE FEDERAL DO RIO DE JANEIRO
COPPE – Programa de Engenharia Elétrica
Prof. Glauco Nery Taranto, Ph.D.
[email protected]
Centro de Tecnologia – Ilha do Fundão
tel. 2562-8615 fax: +2562-8628
Falta, portanto, determinar qual deverá ser o sinal injetado para fazer com que a freqüência
retorne ao seu valor inicial após um impacto de carga.
Vimos no item anterior que o tipo de controle que obriga o desvio original retornar a zero, é o
controle integral apresentado no regulador isócrono. Pode ser então, utilizado um controlador
do tipo PI (proporcional e integral) que faz com que o erro em regime seja nulo além de
acelerar o processo de correção do erro.
A Error! Reference source not found. mostra uma possível estrutura da regulação
secundária. O sinal de entrada do regulador é o erro de freqüência, e o sinal de saída é o sinal
de referência para o regulador de velocidade.
f barra
KI
s
f cag
f ref
KP
Figura VIII.10 - Sinal de referência
Na Error! Reference source not found. é mostrado o diagrama de blocos com regulação
primária e secundária.
1
1 s TG
1
R
Pmec
f
KI
s
f cag
KP
Figura VIII.11 - Regulação Primária e Secundária
COE754 – Dinâmica e Controle de Sistemas de Potência
VIII-8
UNIVERSIDADE FEDERAL DO RIO DE JANEIRO
COPPE – Programa de Engenharia Elétrica
Prof. Glauco Nery Taranto, Ph.D.
[email protected]
Centro de Tecnologia – Ilha do Fundão
tel. 2562-8615 fax: +2562-8628
O gráfico f x P da Error! Reference source not found. nos mostra o caso de uma única
unidade geradora alimentando uma carga que está operando no ponto 1 no estado de
equilíbrio inicial. Após uma variação de carga Pd a carga passará a Pd 1 e a unidade geradora
fornecerá PG1 Pd 1 , porém a uma freqüência mais baixa f1 . Estaremos portanto operando no
ponto 2.
O controle secundário continuará a agir e somente cessará sua ação quando a freqüência
voltar ao seu valor original. Devemos notar que a ação do controle secundário não interfere na
característica de estatismo da máquina. Logo o novo ponto de operação após a atuação do
controle secundário corresponderá ao ponto 3.
Figura VIII.12 - Característica f x P com regulação secundária
COE754 – Dinâmica e Controle de Sistemas de Potência
VIII-9
UNIVERSIDADE FEDERAL DO RIO DE JANEIRO
COPPE – Programa de Engenharia Elétrica
Prof. Glauco Nery Taranto, Ph.D.
[email protected]
Centro de Tecnologia – Ilha do Fundão
tel. 2562-8615 fax: +2562-8628
IX. ESTABILIDADE A PEQUENAS PERTURBAÇÕES
IX.1 Amortecimento de Oscilações Eletromecânicas
No fim da década de 50 início da década de 60 os novos geradores que estavam sendo
instalados no sistema Norte-americano, eram equipados com reguladores de tensão de ação
contínua. Esses reguladores de tensão tinham a característica de serem mais rápidos que seus
antepassados e de poderem amplificar sinais com ganhos mais elevados. À medida que a
percentagem desses novos reguladores instalados foi se tornando mais significativa, começouse a observar que esses tinham um efeito detrimental à estabilidade de regime permanente do
sistema. Oscilações de baixa freqüência, usualmente persistiam, por longos períodos. Este fato
se tornou um motivo para que a comunidade dos engenheiros de sistemas de potência, partisse
em busca de uma solução do problema. O Estabilizador de Sistema de Potência (ESP), ou no
inglês, Power System Stabilizer (PSS), foi o primeiro sistema de controle, que via sistema de
excitação, resolveu o problema de amortecimento das oscilações eletromecânicas. Aqui no
Brasil o ESP também é conhecido como Sinal Adicional Estabilizante (SAE) conforme
mostrado na Fig.22.
De lá para cá, outros equipamentos já foram ou são utilizados no problema do
amortecimento das oscilações eletromecânicas em sistemas de potência. Compensadores
Estáticos de Rativo (CER), modulação de controle em sistemas CCAT e equipamentos
FACTS são algumas das soluções também utilizadas neste tipo de problema.
-
Vref
e
RAT
+
Ef d
|Vt|
Gerador
+
SAE
Figura 34. Malha de Controle do Regulador de Tensão
IX.2 Modelo Dinâmico do Sistema
O desempenho dinâmico de um sistema de potência pode ser descrito por um conjunto de n
equações diferenciais ordinárias de primeira ordem e um conjunto auxiliar de m equações
algébricas, da forma
xi f i x1 , x2 ,, xn , r1 , r2 ,, rm , u1 , u2 ,, uk , t i 1, 2,, n
(VI.1)
0 g j x1 , x2 ,, xn , r1 , r2 ,, rm , u1 , u2 ,, uk , t
j 1, 2,, m
b
b
g
g
onde n é a ordem do sistema (número de equações diferenciais), m é o número de equações
algébricas e k é o número de variáveis de entrada (excitações).
Pode-se utilizar notação vetorial para compactar estas equações, resultando em
x f x, r , u, t
(VI.2)
0 g x, r , u , t
RS b
T b
COE754 – Dinâmica e Controle de Sistemas de Potência
g
g
IX-1
UNIVERSIDADE FEDERAL DO RIO DE JANEIRO
COPPE – Programa de Engenharia Elétrica
Prof. Glauco Nery Taranto, Ph.D.
[email protected]
Centro de Tecnologia – Ilha do Fundão
tel. 2562-8615 fax: +2562-8628
LM x OP
MM x PP
MN x PQ
1
onde x
2
n
LM r OP
MMr PP
MNr PQ
1
r
2
m
u
LM f bgOP
LM g bg OP
LM u OP
MMu PP f bg MM f bgPP gbg MM g bgPP
MMN f bgPPQ
MMN g bgPPQ
MNu PQ
1
1
1
2
2
2
k
n
m
O vetor x é chamado de vetor de estados e as variáveis xi são chamadas variáveis de estado. as
variáveis rj são variáveis algébricas e o vetor u é o vetor de variáveis de entrada.
O estado de um sistema representa o conjunto mínimo de informações sobre o sistema, em um
dado instante de tempo t0, necessário para a determinação de seu comportamento sem a
necessidade de nenhuma informação referente a instantes de tempo anteriores.
Se a ordem do sistema é n, qualquer conjunto de n variáveis do sistema que seja linearmente
independente pode ser utilizado. Estas variáveis são chamadas, então, de variáveis de estado.
Pode-se mostrar que as demais variáveis do sistema podem ser escritas como funções das
variáveis de estado.
As variáveis de estado podem ser grandezas físicas como velocidade, posição, tensão,
corrente, etc., ou podem ser variáveis matemáticas abstratas associadas com as equações
diferenciais que descrevem o sistema. A escolha de um conjunto de variáveis de estado não é
única e, em geral, um destes conjuntos é utilizado para a obtenção do modelo (determinação
das equações diferenciais e algébricas que descrevem o sistema) e um segundo conjunto pode
ser utilizado para sua solução. Esta troca de variáveis de estado corresponde,
matematicamente, a uma mudança de sistemas de coordenadas.
IX.3 Ponto de Equilíbrio
Os pontos de equilíbrio são caracterizados por todas as derivadas das variáveis de estado
serem simultaneamente nulas, fazendo com que todas as variáveis de estado sejam constantes
(invariantes no tempo).
Portanto, um ponto de equilíbrio ou ponto singular deve satisfazer o seguinte conjunto de
equações:
0 f x 0 , r0 , u 0
(VI.3)
0 g x 0 , r0 , u 0
onde x0 e r0 são os vetores de variáveis de estado e algébricas no ponto de equilíbrio,
respectivamente.
Se o sistema for linear, só há um único ponto de equilíbrio. Sistemas não-lineares podem
possuir diversos pontos de equilíbrio.
A estabilidade de um sistema linear independe da entrada aplicada, e os estados de um
sistema linear estável sempre retornarão para o ponto de equilíbrio para qualquer condição
inicial finita.
Já um sistema não-linear tem sua estabilidade influenciada pela amplitude e tipo de entrada
aplicada, bem como pela condição inicial considerada. Para sistemas não-lineares, pode-se
classificar a estabilidade em diversas categorias, dependendo das condições a serem
analisadas.
Estabilidade local
Um sistema é dito localmente estável em torno de um ponto de equilíbrio se, quando
submetido a pequenas perturbações, ele permanece em um região (pequena) em torno do
ponto de equilíbrio.
RS b
T b
COE754 – Dinâmica e Controle de Sistemas de Potência
g
g
IX-2
UNIVERSIDADE FEDERAL DO RIO DE JANEIRO
COPPE – Programa de Engenharia Elétrica
Prof. Glauco Nery Taranto, Ph.D.
[email protected]
Centro de Tecnologia – Ilha do Fundão
tel. 2562-8615 fax: +2562-8628
Se o sistema retorna ao ponto de equilíbrio, ele é dito assintoticamente estável.
A estabilidade local (ou estabilidade a pequenas perturbações) pode ser estudada
através da linearização das equações em torno do ponto de equilíbrio considerado.
Estabilidade finita
Se o estado do sistema permanece dentro de uma região finita R, o sistema é dito
estável em R. Se, além disso, ele retorna ao ponto de equilíbrio original, o sistema é dito
assintoticamente estável em R.
Estabilidade global
O sistema é globalmente estável se sua região de estabilidade R inclui todo o espaço
finito.
IX.4 Linearização
Pode-se linearizar as equações que descrevem um sistema em torno de um ponto de equilíbrio
(x0, r0, u0) utilizando-se a expansão em série de Taylor. Desprezando-se os termos de ordem
superior, a equação (II.1) pode ser escrita como
f
f
f
x 0
x f x 0 , r0 , u 0
x
r
u
x x 0 ,r0 ,u 0
r x0 ,r0 ,u 0
u x 0 ,r0 ,u 0
(VI.4)
g
g
g
0 g x 0 , r0 , u 0
x
r
u
x x 0 ,r0 ,u 0
r x 0 ,r0 ,u 0
u x 0 ,r0 ,u 0
b
g
b
g
e, utilizando-se a equação (II.3), o modelo linearizado do sistema é dado por
f
f
f
x
x
r
u
x x 0 ,r0 ,u 0
r x 0 ,r0 ,u 0
u x 0 ,r0 ,u 0
0
g
x
x x 0 ,r0 ,u 0
g
r
r x 0 ,r0 ,u 0
g
u
u x 0 ,r0 ,u 0
(VI.5)
Em geral, apenas determinadas variáveis do sistema são de interesse. Estas variáveis são
chamadas variáveis de saída e podem ser escritas a partir das variáveis de estado como sendo
(VI.6)
y h x, r, u
Esta equação também pode ser linearizada em torno do ponto de equilíbrio do sistema,
resultando em
h
h
h
(VI.7)
y0
y h x0 , r0 , u0
x
r
u
x x0 ,r0 ,u0
r x0 ,r0 ,u0
u x0 ,r0 ,u0
As equações (II.4) e (II.20) podem ser reescritas na forma matricial como
f
f
f
x
x
x
r
u
u
g
g
g
0
r
(VI.8)
x
r x , r ,u
u x ,r ,u
b
b
g
g
L
LM OP MM
N Q M
N
Lh
y M
Nx
OP
PP
Q
hO
r PQ
0
0
0
x 0 ,r0 ,u 0
LM
N
LM
N
OP
Q
xO
r PQ
LM OP
MM PP
N Q
LM h OP
N uQ
0
0
0
u
x 0 ,r0 ,u 0
ou
COE754 – Dinâmica e Controle de Sistemas de Potência
IX-3
UNIVERSIDADE FEDERAL DO RIO DE JANEIRO
COPPE – Programa de Engenharia Elétrica
Prof. Glauco Nery Taranto, Ph.D.
[email protected]
Centro de Tecnologia – Ilha do Fundão
tel. 2562-8615 fax: +2562-8628
LM I 0OP LM x OP LM x OP LMJ J OP LM xOP LMB OP
N0 0Q N r Q N 0 Q NJ J Q N r Q NB Q
L xO
y C C M P D u
N rQ
x
1
2
x
3
4
r
r
u
(VI.9)
a
e este sistema de equações pode ser representado de forma compacta como sendo
T x a J x a B a u
(VI.10)
y Ca x D a u
Este sistema de equações é conhecido como sistema descritor e pode ser entendido como uma
generalização da equação de estados convencional. A matriz J é chamada de matriz Jacobiano
do sistema e, para o caso de sistemas elétricos de grande porte, é extremamente esparsa. Esta
característica é fundamental para a implementação eficiente dos métodos computacionais de
análise deste problema.
A obtenção da equação de estados é feita através da eliminação das variáveis algébricas r na
equação(VI.9). Pode-se escrever que
0 J 3 x J 4 r Br u
r
J 41 J 3 x Br u
e, substituíndo-se o valor de r, obtém-se
x J 1 x J 2 J 4 1 J 3 x B r u
(VI.11)
y Cx x C J 41 J 3 x B r u Da u
ou, agrupando-se os termos,
x J1 J 2 J 4 1 J 3 x
J 2 J 41 B r u A x B u
(VI.12)
y C x Cr J 4 1J 3 x
Cr J 4 1 B r Da u C x D u
b
b
b
c
c
h c
h c
g
g
g
h
h
IX.5 Equações de Estado de um Sistema de Potência
O exemplo do gerador conectado a um sistema de potência de grande porte (barra infinita)
através de linhas de transmissão radiais é, provavelmente, o problema de estabilidade mais
estudado da história. Este é o mais simples dos sistemas elétricos, permitindo o
desenvolvimento analítico de sua solução e proporcionando o entendimento dos aspectos
físicos envolvidos no fenômeno da estabilidade de sistemas de potência.
A Figura 35 apresenta o diagrama unifilar do sistema máquina x barra infinita. A tensão da
barra infinita é considerada constante durante o período transitório do sistema e o gerador será
representado por modelos dinâmicos de diversos níveis de sofisticação.
VB 0o
Vt
Re
Xe
Figura 35. Diagrama Unifilar do Sistema Máquina x Barra Infinita
Desprezando-se os efeitos transitórios dos enrolamentos de estator, bem como da linha de
transmissão, a solução da rede elétrica pode ser obtida fasorialmente como
Ir
Re X e
Vr
Vb
1
(VI.13)
Im
Re Vm
0
Re2 X e2 X e
LM OP
N Q
LM
N
COE754 – Dinâmica e Controle de Sistemas de Potência
OP RSLM OP LM OPUV
Q TN Q N Q W
IX-4
UNIVERSIDADE FEDERAL DO RIO DE JANEIRO
COPPE – Programa de Engenharia Elétrica
Prof. Glauco Nery Taranto, Ph.D.
[email protected]
Centro de Tecnologia – Ilha do Fundão
tel. 2562-8615 fax: +2562-8628
~
~
onde I t I r jI m é a corrente e Vt Vr jVm é a tensão terminal do gerador.
O modelo dinâmico do gerador, em geral, está baseado na Transformada de Park e, portanto,
utiliza variáveis referidas para um novo conjunto de coordenadas dq. A relação que
transforma variáveis da referência do sistema (rm) para a referência da máquina (dq) é dada
por
sin
cos
d
r
(VI.14)
cos
sin
q
m
e a relação inversa pode ser escrita como
sin
cos
d
r
(VI.15)
cos
sin
q
m
Estas transformações se aplicam para todas as grandezas fasoriais do sistema, como as tensões
e as correntes.
LM
N
LM
N
OP
Q
OP
Q
OP LM
QN
OP LM
QN
LM
N
LM
N
OP
Q
OP
Q
IX.6 Modelo Clássico de Gerador
O modelo clássico para o gerador caracteriza-se por desprezar a dinâmica associada a todos os
enrolamentos da máquina, mantendo-se apenas as equações diferenciais associadas ao
movimento do rotor. Neste caso, a máquina síncrona é representada por uma tensão constante
atrás da impedância transitória de eixo d. As equações diferenciais associadas a este modelo
são:
d
1
Tm Te KD
dt 2 H
(VI.16)
d
0 1
dt
e, portanto, a velocidade e a posição angular podem ser tomadas como variáveis de estado
para a representação deste sistema.
A tensão interna da máquina pode ser obtida a partir das condições terminais, determinadas
pelo fluxo de potência do sistema, como sendo
~ ~
~ ~
~
(VI.17)
E Vt Ra jX d I t Vb Ra Re j X d X e It E
b
g
b g
b
b
g
g
Para que a equação (II.20) seja colocada na forma de uma equação de estados,
mostrada em (II.11), deve-se exprimir o torque elétrico Te em função das demais variáveis do
problema e, em p.u., pode-se escrever que
Te
Pe
E 2 RT
E Vb RT cos
E Vb X T sin
2
2
RT X T
(VI.18)
onde RT = Re + Ra e XT = Xe + X’d.
O modelo do sistema máquina x barra infinita, com o gerador representado pelo modelo
clássico, pode ser escrito como
d
1
E 2 RT E Vb RT cos
E Vb X T sin
Tm
KD
2
2
dt 2 H
RT X T
(VI.19)
d
0 1
dt
A determinação do ponto de equilíbrio para este sistema de equações é feita a partir
das condições terminais da máquina, obtidos do fluxo de potência:
FG
H
IJ
K
b g
COE754 – Dinâmica e Controle de Sistemas de Potência
IX-5
UNIVERSIDADE FEDERAL DO RIO DE JANEIRO
COPPE – Programa de Engenharia Elétrica
Prof. Glauco Nery Taranto, Ph.D.
[email protected]
Centro de Tecnologia – Ilha do Fundão
tel. 2562-8615 fax: +2562-8628
1. Obter as componentes da tensão terminal Vr
2. Obter as componentes da corrente terminal I r
~
3. Determinar a tensão interna E
Vt cos e Vm
PVr QVm
bV
Vt
2
g b
Vt sin
PVm QVr
e Im
2
Vt
g
Ra I r X d I m j Vm Ra I m X d I r
E
tan 1 m
4. Determinar o ângulo de carga
Er
A linearização das equações de estado em torno do ponto de operação resulta em
d
1
E Vb RT sin 0 E Vb X T cos 0
Tm
KD
dt
2H
RT2 X T2
r
FG
H
d
dt
ou, na forma matricial,
d
dt
E Vb RT sin
IJ
K
(VI.20)
0
LM OP LM
N Q MN
KS
2H
2H
0
0
OP L O L 12 H O
PQ MN PQ MMN 0 PPQ
Tm
(VI.21)
E Vb X T cos
X T2
0
é o coeficiente de torque sincronizante, conforme
R
definido na equação ( .1).
A Figura 36 apresenta o diagrama de blocos correspondente à equação de estados mostrada
em (II.24).
Tm +
1
0
2Hs
s
Te
onde KS
0
2
T
KD
+
KD
+
KS
Figura 36. Diagrama de Blocos do Sistema Máquina x Barra Infinita Linearizado
com Modelo Clássico de Gerador
COE754 – Dinâmica e Controle de Sistemas de Potência
IX-6
UNIVERSIDADE FEDERAL DO RIO DE JANEIRO
COPPE – Programa de Engenharia Elétrica
Prof. Glauco Nery Taranto, Ph.D.
[email protected]
Centro de Tecnologia – Ilha do Fundão
tel. 2562-8615 fax: +2562-8628
X.
AUTO–EXCITAÇÃO
O fenômeno da auto-excitação é uma outra forma de instabilidade que pode ocorrer em
máquinas síncronas e máquinas de indução. A auto-excitação elétrica pode ocorrer quando o
circuito, ao qual a máquina está ligada, contém elevadas capacitâncias. Por exemplo, um
gerador síncrono pode estar ligado a uma linha de transmissão aberta, ou um motor de
indução pode ser deixado ligado aos terminais de um capacitor.
A auto-excitação ocorre quando o gerador perde o controle da sua tensão terminal. Esta
condição aparece em condições especiais em que a quantidade de potência reativa fornecida
pelo sistema é maior do que a capacidade de absorção da máquina. Isso pode ocorrer, por
exemplo, em sistemas de linhas longas após uma rejeição de carga. Nesses casos, a atuação do
regulador de tensão, em geral, não é suficiente para evitar o problema. A auto-excitação pode
causar diversos problemas graves como a perda de vida útil de dielétricos e, até mesmo, a
queima do gerador.
Para fixar os conceitos básicos do fenômeno da auto-excitação, analisaremos o caso
simplificado de um gerador ligado à uma capacitância C, conforme mostra a Figura 48.
Gerador
Síncrono V
I
C
Figura 48. Gerador síncrono ligado a uma capacitância
Desprezando os efeitos subtransitórios a máquina pode simplificadamente ser
representada pelos circuitos equivalentes de eixos d e q, dados na Figura 49.
L
L
i fd
id
Lad
i kq
iq
Laq
L fd
L kq
q
d
rfd
rkq
efd
eixo d
eixo q
Figura 49. Circuitos equivalentes de eixos d e q
Visto que os fenômenos da auto-excitação são freqüentemente associados a
1,0 e X L nem sempre pode ser
condições de sobrefreqüência, a suposição de que
feita. Conseqüentemente, os enlaces de fluxos e as tensões serão mantidas independentes.
Da Figura 48, tem-se:
COE754 – Dinâmica e Controle de Sistemas de Potência
X-1
UNIVERSIDADE FEDERAL DO RIO DE JANEIRO
COPPE – Programa de Engenharia Elétrica
Prof. Glauco Nery Taranto, Ph.D.
[email protected]
Centro de Tecnologia – Ilha do Fundão
tel. 2562-8615 fax: +2562-8628
V
Xc
I
V
V
1/ j C
ed
jeq
então,
I
j (ed
jeq ) C
eq C
jed C
onde
eq C e iq
id
ed C
As equações de tensão e corrente do estator (desprezando os termos
d
dt
e a
resistência da armadura) no sistema de coordenadas dq0, são:
eq
d
id
eq C
ed
iq
e ' q id L ' d
q
ed C
2
d
C
Ce'q id
2
L'd C
e ' d iq L ' q
2
q
C
Ce'd iq
2
L'd C
onde
e' q
id L ' d
d
e' d
q
L ' q iq
As equações de tensão transitória de eixos d e q relacionadas com as grandezas do
rotor são:
T ' do de' q
E fd Lad i fd
dt
T ' qo de'd
Laq ikq
dt
onde
E fd
T ' do
T ' qo
Lad i fd
e fd r fd
Lad
L ffd
r fd
Laq
Lkq
rkq
e' q
id ( Ld
L' d )
f ( e' q / )
COE754 – Dinâmica e Controle de Sistemas de Potência
X-2
UNIVERSIDADE FEDERAL DO RIO DE JANEIRO
COPPE – Programa de Engenharia Elétrica
Prof. Glauco Nery Taranto, Ph.D.
[email protected]
Centro de Tecnologia – Ilha do Fundão
tel. 2562-8615 fax: +2562-8628
onde f (e'q / ) é o excesso de corrente de campo, devido à saturação, a qual é uma
função do nível de fluxo e'q /
, e L'd
Ll
L fd Lad
L ffd
.
Aplicando-se a Transformada de Laplace, desprezando a saturação e após muito
algebrismo, as equações acima se tornam:
Para o eixo d
E 'q ( s)
E fd ( s )
T 'do
1
e'q (0)
s
1
T 'do (1
2
Ld C
2
L' d C )
Para o eixo q
e'd (0)
2
1
Lq C
E 'd ( s)
s
T 'qo (1
2
L'q C )
onde e'q (0) e e'd (0) são as condições inicias das tensões transitórias de eixo q e d,
respectivamente.
Analisando as expressões anteriores, tem-se que os enlaces de fluxo no eixo-d (e'q ) ,
exibirão auto-excitação, isto é, aumentarão com o tempo se:
1
T 'do (1
2
Ld C
2
L' d C )
0
Como Ld L'd , a maior capacitância C, que o gerador síncrono pode alimentar sem
que haja auto-excitação no eixo-d é
C
1
ou
Ld
2
Ld
1
C
ou seja, na ausência de reguladores de tensão, se a reatância capacitiva da carga for
menor do que a reatância síncrona de eixo-d, a máquina sofrerá auto-excitação. Isso tenderá
ocorrer à medida que C for aumentando.
Note que o valor da capacitância para auto-excitação varia inversamente com o
quadrado da freqüência. Isso não é bom quando há sobrefreqüência no sistema, já que a autoexcitação se dará para valores menores de capacitância. O contrário ocorre quando há
subfreqüência.
O regulador de tensão afeta somente o fluxo no eixo-d, podendo assim influenciar o
fenômeno de autoexcitação que ocorre segundo esse eixo. Porém, ele não impede que o
fenômeno ocorra no eixo-q.
COE754 – Dinâmica e Controle de Sistemas de Potência
X-3
UNIVERSIDADE FEDERAL DO RIO DE JANEIRO
COPPE – Programa de Engenharia Elétrica
Prof. Glauco Nery Taranto, Ph.D.
[email protected]
Centro de Tecnologia – Ilha do Fundão
tel. 2562-8615 fax: +2562-8628
Os enlaces de fluxo no eixo-q (e'd ) , exibirão auto-excitação, isto é, aumentarão com
o tempo se:
1
T 'qo (1
2
Lq C
2
L' q C )
0
Como Lq L'q , a maior capacitância C, que o gerador síncrono pode alimentar sem
que haja auto-excitação no eixo-q é
C
1
ou
Lq
2
Lq
1
C
ou seja, quando a reatância capacitiva da carga for menor do que a reatância síncrona
de eixo-q.
O fenômeno da auto-excitação envolve aumentos exponenciais de fluxos e tensões
em função do tempo. O problema envolve não linearidades devido à saturação, exigindo
assim o uso da simulação completa no tempo.
COE754 – Dinâmica e Controle de Sistemas de Potência
X-4
UNIVERSIDADE FEDERAL DO RIO DE JANEIRO
COPPE – Programa de Engenharia Elétrica
Prof. Glauco Nery Taranto, Ph.D.
[email protected]
Centro de Tecnologia – Ilha do Fundão
tel. 2562-8615 fax: +2562-8628
XI. RESSONÂNCIA SUBSÍNCRONA
O fenômeno da ressonância subsíncrona foi observado pela primeira vez em dezembro de
1970, resultando no rompimento do eixo de um turbogerador da usina de Mohave, pertencente
a Southern Califórnia Edson Company, localizada ao sul da Califórnia, EUA. No entanto, a
origem do problema só foi reconhecida como ressonância subsíncrona após a ocorrência do
segundo evento na mesma usina, em setembro de 1971 (BALLANCE, 1973). Desde então, a
indústria de energia elétrica tem se mostrado preocupada no detalhamento do comportamento
dos sistemas mecânicos dos turbo-geradores e sua interação com o sistema elétrico, em
virtude do aumento considerável no uso de compensação série nos sistemas de transmissão.
Os itens a seguir ilustram o problema da ressonância subsíncrona a partir de modelos bastante
simplificados, mas que traduzem a idéia básica por trás dos fenômenos que governam o
comportamento de sistemas termelétricos série-compensados.
XI.1 Influência de Capacitores Série em Sistemas de Potência
Considere um simples sistema radial, constituído por uma unidade geradora conectada a uma
barra infinita, através de uma linha de transmissão série-compensada, cujo diagrama unifilar é
apresentado na Figura XI.1:
Figura XI.1 – Sistema radial com compensação série
Este sistema de transmissão consiste em um circuito LC série, que possui apenas uma
freqüência natural de oscilação, dada por:
n
1
LC
B
XC
XL
onde: -
n
é a freqüência natural, em rad/s;
-
B
é a freqüência síncrona do sistema, em rad/s;
(XI.1)
- L e C representam a indutância e capacitância equivalente, em Henry e Farad,
respectivamente;
- XL e XC correspondem às reatâncias indutiva e capacitiva à freqüência síncrona, em
ohms.
Com base na equação (XI.1), verifica-se que, para este sistema radial, a freqüência natural n
será sempre inferior a freqüência síncrona B . Na realidade, a equação (XI.1) deveria
COE754 – Dinâmica e Controle de Sistemas de Potência
XI-5
UNIVERSIDADE FEDERAL DO RIO DE JANEIRO
COPPE – Programa de Engenharia Elétrica
Prof. Glauco Nery Taranto, Ph.D.
[email protected]
Centro de Tecnologia – Ilha do Fundão
tel. 2562-8615 fax: +2562-8628
considerar a reatância equivalente do gerador no cálculo de
desprezada.
n
, mas por simplicidade ela será
Em geral, os sistemas de potência são mais complexos, apresentando muitas freqüências
naturais de oscilação. Cada uma destas freqüências pode ser determinada a partir dos
parâmetros dos componentes da rede. Elementos em derivação, em geral, introduzem
freqüências elevadas, não compatíveis com as faixas de freqüências naturais dos sistemas
mecânicos acoplados aos geradores e, em geral, podem ser desprezados (KUNDUR, 1994).
XI.1.1. Influência de Freqüências Subsíncronas nos Geradores Síncronos
No item anterior foi visto que os sistemas de transmissão série-compensados introduzem
freqüências naturais de oscilação na faixa subsíncrona. Estas oscilações são refletidas na
máquina síncrona, induzindo torques característicos no rotor. Estes torques induzidos podem
interagir de forma adversa com os sistemas elétricos e mecânicos associados ao conjunto
turbina-gerador, tornando o sistema auto-excitado.
Para compreender a origem destas interações, considere o sistema eletromecânico apresentado
na Figura XI.2 (TOMIM, 2004). Este sistema é uma representação bastante simplificada do
rotor de um gerador síncrono e é constituído de uma bobina com N espiras, percorrida por
uma corrente if0 e sob a ação de um campo magnético girante Bs à velocidade síncrona s ,
idêntica à rotação da bobina. A bobina também está sujeita a um outro campo magnético
girante Bn , com velocidade n , diferente da síncrona.
Figura XI.2 – Sistema eletromecânico simplificado para ilustração do efeito das freqüências
subsíncronas nos geradores síncronos [Tomim 2004]
O vetor M s indicado na figura representa o momento de dipolo magnético da bobina. O
módulo deste vetor é dado pelo produto da corrente total percorrida pela bobina pela área do
circuito fechado formado pela bobina, ou seja N A i f 0 . O vetor M s é normal ao plano da
bobina, e sua orientação é dada pela regra da mão-direita.
COE754 – Dinâmica e Controle de Sistemas de Potência
XI-6
UNIVERSIDADE FEDERAL DO RIO DE JANEIRO
COPPE – Programa de Engenharia Elétrica
Prof. Glauco Nery Taranto, Ph.D.
[email protected]
Centro de Tecnologia – Ilha do Fundão
tel. 2562-8615 fax: +2562-8628
Os ângulos A , s e n referem-se aos vetores M s , Bs e Bn , respectivamente, e são
medidos em relação a uma referência fixa. Estes ângulos são dados em função de s , n e de
seus valores iniciais, de acordo com as expressões a seguir:
t
A0
[rad]
t
s0
[rad]
t
n0
[rad]
A
s
s
s
n
n
(XI.2)
A interação da corrente if0 e o campo magnético Bs dá origem a um conjugado
eletromagnético Cs , que é dado pelo produto vetorial entre M s e Bs .
Cs
M s Bs
[N.m]
(XI.3)
Para facilitar a notação, pode-se escrever:
Ms
Bs
[A.m2]
NAi f 0 m
(XI.4)
[Wb/m2]
Bs s
(XI.5)
onde m e s são vetores unitários que determinam a direção e sentido de M s e Bs ,
respectivamente.
Levando em consideração que a rotação da bobina e do campo girante Bs são iguais à
velocidade síncrona e que o ângulo entre m e s é dado pela diferença entre
s
e
A
, obtém-
se Cs dado a seguir:
Cs
NABs i f 0 sen(
s0
A0
)z
[N.m]
(XI.6)
onde z é um vetor unitário que determina a direção e sentido do vetor resultante do produto
vetorial.
Pela equação (XI.6) verifica-se que se o eixo magnético da bobina estiver atrasado em relação
ao campo, o conjugado será positivo, ajudando o movimento da bobina. Esta condição
determina a operação da bobina como um motor síncrono. Por outro lado, se o eixo magnético
da bobina estiver adiantado em relação ao campo, o conjugado negativo, se opondo ao
movimento da bobina. Esta condição caracteriza a operação da bobina como gerador
síncrono. A relação de torque apresentada na equação (XI.6) exprime o funcionamento básico
das máquinas síncronas.
COE754 – Dinâmica e Controle de Sistemas de Potência
XI-7
UNIVERSIDADE FEDERAL DO RIO DE JANEIRO
COPPE – Programa de Engenharia Elétrica
Prof. Glauco Nery Taranto, Ph.D.
[email protected]
Centro de Tecnologia – Ilha do Fundão
tel. 2562-8615 fax: +2562-8628
Analisemos agora o efeito das correntes subsíncronas presentes nos enrolamentos do estator
nos torques induzidos no rotor da máquina síncrona. Estas correntes subsíncronas dão origem
a campos girantes na armadura da máquina, com freqüência angular n . Uma vez que as
velocidades da bobina e do campo magnético girante não são mais iguais, serão induzidas
tensões e correntes na bobina.
Pela Lei de Indução de Faraday, pode-se determinar a tensão induzida na bobina pela ação de
e Bt ¨referem-se ao fluxo total enlaçado e ao campo
Bn . As grandezas denotadas por
magnético total aplicado à bobina, respectivamente, e estão relacionadas pela equação a
seguir:
d
dt
[V]
(XI.7)
NABt m [Wb]
(XI.8)
Tendo em vista que:
Bn
Bn n
Bt
Bs
Bn
[Wb/m2]
(XI.9)
[Wb/m2]
(XI.10)
Pode-se determinar uma expressão analítica para o fluxo total enlaçado
tempo:
(t )
NA Bs cos(
s0
A0
) Bn cos(s st
A0
n0
)
[Wb]
em função do
(XI.11)
Nesta equação, o termo s é definido como o escorregamento entre o campo magnético girante
Bn e o eixo magnético da bobina M s . Ou seja, s é dado pela velocidade relativa entre n e
s , normalizada em relação a
s:
s
s
n
(XI.12)
s
Substituindo esta expressão para
na equação (XI.7), determina-se a tensão induzida na
bobina pela ação do campo magnético total.
(t ) s s NABn sen(s st
A0
n0
) sEsen(s st
A0
n0
)
[V]
(XI.13)
Como a bobina forma um circuito fechado com parâmetros de indutância L e resistência R
próprios, a tensão induzida na bobina dá origem a uma corrente i, que circula na bobina. A
expressão analítica para a corrente induzida pode ser então calculada, resultando em:
i(t )
Isen(s st
) [A]
COE754 – Dinâmica e Controle de Sistemas de Potência
(XI.14)
XI-8
UNIVERSIDADE FEDERAL DO RIO DE JANEIRO
COPPE – Programa de Engenharia Elétrica
Prof. Glauco Nery Taranto, Ph.D.
[email protected]
Centro de Tecnologia – Ilha do Fundão
tel. 2562-8615 fax: +2562-8628
E
onde: I
X L2
A0
e:
XL
[A]
2
R
s
tan
n0
s
[
L
1
sX L
R
[rad]
]
A corrente total na bobina será dada pela soma entre if0 e i(t). Desta forma, o momento de
dipolo magnético total resultante será dado pelas contribuições de if0 e de i(t), dadas
respectivamente por M s e M i . Assim sendo:
Mt
Ms
Mi
NA i f 0
m [A.m2]
Isen s s t
(XI.15)
Conseqüentemente, o torque eletromagnético exercido sobre a bobina pode ser calculado a
partir da equação a seguir:
Ct
M t Bt
[N.m]
(XI.16)
Desenvolvendo analiticamente esta expressão e efetuando simplificações trigonométricas,
verifica-se que o conjugado eletromagnético desenvolvido é composto por três parcelas
distintas: uma constante, uma com a freqüência relativa entre Bn e M s , e outra com
freqüência dada pelo dobro desta última.
Ct
C0 C ( s s t ) C (2s st ) z
[N.m]
(XI.17)
As expressões para as parcelas individuais de torque na equação (XI.17) são dadas por:
C0
NAIBn
cos(
2
Cs
n0
A0
C(s st )
NA k12 k22 cos(s st
C (2s st )
NAIBn
cos(2s st
2
[N.m]
)
[N.m]
)
n0
A0
) [N.m]
(XI.18)
(XI.19)
(XI.20)
onde:
k1
IBs sen(
s0
A0
) cos
i f 0 Bn cos(
k2
IBs sen(
s0
A0
)sen
i f 0 Bn sen(
A0
A0
n0
n0
)
)
COE754 – Dinâmica e Controle de Sistemas de Potência
(XI.21)
(XI.22)
XI-9
UNIVERSIDADE FEDERAL DO RIO DE JANEIRO
COPPE – Programa de Engenharia Elétrica
Prof. Glauco Nery Taranto, Ph.D.
[email protected]
Centro de Tecnologia – Ilha do Fundão
tel. 2562-8615 fax: +2562-8628
tan
k1
k2
1
(XI.23)
A componente contínua pode ser ainda desmembrada em outras duas parcelas. A primeira
corresponde ao torque referente à operação síncrona da bobina, dado por Cs. A segunda
componente de torque surge devido à presença das correntes subsíncronas na armadura,
devido à interação do campo girante Bn e o momento de dipolo da bobina. Efetuando
algumas simplificações analíticas, a expressão para a parcela de torque contínua pode ser
expressa da seguinte forma:
C0
AERBn
Cs
2s
R
s
Cs C (s)
2
X L2
(XI.24)
A Figura XI.3 apresenta o comportamento de C(s) em função da freqüência ωn. Estando a
máquina operando como gerador síncrono, Cs é negativo. Neste caso, se s é negativo (ωn>
ωs), o torque C(s) se opõe a Cs, ou seja, tende a diminuir o torque eletromagnético total
exercido sobre a bobina. Por outro lado, se s é positivo (ωn< ωs), C(s) atua a favor de Cs e o
torque total é acrescido.
Figura XI.3 – Característica de C(s) em função da freqüência ωn
A componente C(s st ) advém das interações entre Bn e M s , e Bs e M i , uma vez que
ambos os pares apresentam escorregamento s entre si. Esta componente desempenha um papel
fundamental na análise da ressonância subsíncrona, como será mostrado mais adiante. Por
último, a interação entre Bn e M i produz a componente C(2s st ) . Estas duas últimas
componentes não geram trabalho, como C0, mas provocam oscilações na bobina.
Durante as análises do torque eletromagnético desenvolvido sobre a bobina da Figura XI.2
realizadas neste item, considerou-se que a freqüência angular da bobina foi mantida constante.
COE754 – Dinâmica e Controle de Sistemas de Potência
XI-10
UNIVERSIDADE FEDERAL DO RIO DE JANEIRO
COPPE – Programa de Engenharia Elétrica
Prof. Glauco Nery Taranto, Ph.D.
[email protected]
Centro de Tecnologia – Ilha do Fundão
tel. 2562-8615 fax: +2562-8628
Ou seja, adotou-se uma bobina de inércia infinita. No entanto, se a inércia da bobina for finita,
a freqüência angular da bobina passa a variar frente a perturbações no torque eletromagnético.
Este comportamento será analisado em maiores detalhes na próxima seção.
XI.1.2. Influência de Freqüências Subsíncronas nos Sistemas Mecânicos do Eixo
Turbina-Gerador
No item anterior, vimos que a presença de correntes subsíncronas na armadura das máquinas
síncronas produzem torques nas freqüências
e 2 ( s
s
n
n ) no rotor da máquina.
Suponha, agora, que a bobina da Figura XI.2 esteja conectada a um sistema massa-mola como
o ilustrado na Figura XI.4 (TOMIM, 2004).
Figura XI.4 – Bobina acoplada a um sistema mecânico do tipo massa-mola
Este sistema é composto por duas massas com momentos de inércia J1 e J2, conectadas entre
si através de um eixo com constante elástica k12. O amortecimento do sistema foi desprezado
por simplicidade. As equações dinâmicas para este sistema são dadas pela Lei de Newton,
como mostrado a seguir:
J1
d2 1
dt 2
T1 k12 (
J2
d2 2
dt 2
T2 k12 (
1
Se definirmos
equação, dada por:
d2
dt 2
d2
dt 2
d2 2
dt 2
k12
J1
2
2
1
)
1
)
2
[N.m]
(XI.25)
[N.m]
(XI.26)
, as equações (XI.25) e (XI.26) podem ser agrupadas em uma única
d2 1
dt 2
k12
J2
(XI.27)
T2
J2
T1
J1
(XI.28)
A resposta natural deste sistema é obtida anulando-se as excitações, ou seja, fazendo os
torques aplicados às massas, T1 e T2, iguais a zero. Nestas condições, a equação diferencial do
sistema pode então ser escrita como:
COE754 – Dinâmica e Controle de Sistemas de Potência
XI-11
UNIVERSIDADE FEDERAL DO RIO DE JANEIRO
COPPE – Programa de Engenharia Elétrica
Prof. Glauco Nery Taranto, Ph.D.
[email protected]
Centro de Tecnologia – Ilha do Fundão
tel. 2562-8615 fax: +2562-8628
d2
dt 2
k12
J eq
0
1
J eq
onde:
1
J1
(XI.29)
1
J2
A freqüência natural de oscilação deste sistema pode ser obtida comparando-se a equação
(XI.29) com a equação diferencial ordinária de segunda ordem padrão, mostrada em (XI.30).
Nesta equação, ωM e ζ representam a freqüência natural de oscilação e a constante de
amortecimento do sistema, respectivamente.
d2y
dt 2
2
M
dy
dt
2
M
y
0
(XI.30)
Portanto, a freqüência natural do sistema mecânico da Figura XI.4 é dada por:
M
k12
J eq
[rad/s]
(XI.31)
Como este sistema é constituído por duas massas acopladas, apenas uma freqüência natural de
oscilação é verificada. No caso geral, o sistema mecânico é composto por n massas acopladas,
e n-1 freqüências naturais são originadas.
Se considerarmos agora que a bobina da Figura XI.4 esteja sujeita à ação dos campos
magnéticos girantes Bs e Bn , como ilustrado na Figura XI.2, o torque total aplicado à massa
J2 por meio da bobina será dado pela expressão (XI.17). Segundo a teoria de sistemas
dinâmicos, se uma das freqüências
ou 2 ( s
s
n
n ) , que compõem o torque
eletromagnético aplicado à bobina, coincidir ou for próxima da freqüência natural ωM do
sistema mecânico, o sistema pode se tornar instável.
XI.1.3. Análise Global
Os itens anteriores apresentaram as bases teóricas necessárias para a compreensão dos
fenômenos que regem as interações envolvendo os sistemas elétricos e mecânicos das
máquinas síncronas. A presença da freqüência natural ωn na armadura do gerador síncrono
pode ser fruto da interação entre as linhas de transmissão e suas compensações série ou com
qualquer outro elemento que influencie o comportamento dinâmico da rede elétrica, como os
sistemas de controle e dispositivos FACTS (PADIYAR, 1999).
A faixa de freqüências subsíncronas é a que atrai maior atenção por parte da indústria de
energia elétrica, uma vez que as freqüências naturais de oscilação dos sistemas mecânicos dos
eixos turbina-gerador geralmente se situam nesta faixa.
As grandezas relacionadas ao estator da máquina síncrona são refletidas para o rotor da
máquina através de um processo matemático denominado Transformação de Park (PARK,
1929). Por esta transformação, as componentes de freqüência fundamental (60 Hz) das
COE754 – Dinâmica e Controle de Sistemas de Potência
XI-12
UNIVERSIDADE FEDERAL DO RIO DE JANEIRO
COPPE – Programa de Engenharia Elétrica
Prof. Glauco Nery Taranto, Ph.D.
[email protected]
Centro de Tecnologia – Ilha do Fundão
tel. 2562-8615 fax: +2562-8628
correntes nos enrolamentos da armadura são vistas pelo rotor como valores constantes em
regime permanente. No entanto, correntes subsíncronas na freqüência ωn são refletidas para o
rotor nas freqüências
e s
s
n
n . Estas freqüências são denominadas comumente
na literatura como freqüência subsíncrona e supersíncrona, respectivamente.
No caso das freqüências 2 s
e 2 s
n
n , que são o dobro das freqüências tratadas
no parágrafo anterior, apenas a primeira tem capacidade de excitar o conjunto mecânico do
eixo turbina-gerador. No entanto, geralmente a magnitude destas componentes é reduzida.
XI.2 Mecanismos da Ressonância Subsíncrona
Nos itens anteriores foi mostrado, de uma forma elementar, como as freqüências naturais da
rede elétrica podem ser refletidas nos sistemas mecânicos do eixo turbina-gerador (e viceversa), e desta forma interagir de maneira adversa com os modos torsionais dos geradores
síncronos. Neste contexto, a ressonância subsíncrona pode ser originada através de dois
mecanismos distintos, embora mútuos: efeito de gerador de indução e interação torsional.
Um terceiro tipo de interação é mencionado na literatura e recebe o nome de amplificação de
torque. Em todos os casos a ressonância subsíncrona é fruto da interação dos sistemas
mecânicos dos geradores síncronos com os torques produzidos por correntes subsíncronas
presentes na armadura do gerador (IEEE, 1985b). Nos itens a seguir, cada mecanismo
fundamental é descrito em detalhes separadamente.
XI.2.1. Efeito de Gerador de Indução
O efeito gerador de indução é um fenômeno estritamente de origem elétrica e é causado pela
auto-excitação do sistema elétrico associado ao gerador. Uma vez que os circuitos do rotor
giram mais rápido que o campo magnético girante produzido pelas correntes subsíncronas na
armadura, a resistência do rotor vista pela armadura para estas correntes é negativa. Esta
característica é semelhante à operação de uma máquina de indução. A Figura XI.5 representa
um circuito equivalente simplificado de uma máquina síncrona na presença de freqüências
subsíncronas, onde o s é o escorregamento entre as velocidades síncrona e subsíncrona.
Figura XI.5 – Circuito equivalente da máquina síncrona para freqüências subsíncronas
Se desconsiderarmos o efeito da saliência, o comportamento da máquina síncrona seria
idêntico ao de um gerador de indução, frente a freqüências subsíncronas. Desta forma, na
presença de freqüências subsíncronas, o escorregamento torna-se negativo e,
conseqüentemente, também a resistência do rotor. Para valores elevados de compensação
série, esta resistência aparente negativa pode superar a resistência da rede, resultando
COE754 – Dinâmica e Controle de Sistemas de Potência
XI-13
UNIVERSIDADE FEDERAL DO RIO DE JANEIRO
COPPE – Programa de Engenharia Elétrica
Prof. Glauco Nery Taranto, Ph.D.
[email protected]
Centro de Tecnologia – Ilha do Fundão
tel. 2562-8615 fax: +2562-8628
efetivamente em um circuito RLC com resistência negativa. Sob esta condição, o sistema
elétrico torna-se auto-excitado, provocando oscilações de tensão e corrente de amplitudes
crescentes no tempo.
Como visto, o conjugado C(s) denota o comportamento de gerador de indução quando a
máquina síncrona opera na presença de freqüências subsíncronas. Esta característica pode ser
traduzida como uma resistência negativa para o sistema, reforçando assim a idéia apresentada
no parágrafo anterior. Esta forma de auto-excitação é um fenômeno puramente elétrico e não
depende das características do eixo turbina-gerador (KUNDUR, 1994).
XI.2.2. Interação Torsional
Ao contrário do efeito de gerador de indução, a interação torsional envolve tanto o sistema
elétrico quanto o sistema mecânico associado ao eixo turbina-gerador. Vimos que o sistema
mecânico do eixo turbina-gerador apresenta diversas freqüências naturais de oscilação, em
geral situadas na faixa subsíncrona. Estas oscilações são responsáveis pela modulação da
tensão na armadura da máquina, fazendo com que sejam refletidas na rede elétrica. Caso uma
destas freqüências seja próxima a alguma das freqüências naturais da rede, as correntes
percorridas na armadura da máquina induzem torques eletromagnéticos que reforçam as
oscilações primeiras do rotor. Quando estes torques superam os torques de amortecimento
inerentes ao sistema mecânico, o sistema torna-se auto-excitado (IEEE, 1980). Em geral,
fenômenos desta natureza têm conseqüências catastróficas para o eixo do turbogerador.
Mesmo que o sistema não seja instável, pequenas perturbações podem resultar em esforços
torsionais de grande magnitude, causando perda vida útil do eixo por fadiga cíclica.
XI.2.3. Amplificação de Torque
Perturbações no sistema impõem torques transitórios aos rotores dos geradores síncronos. Em
um sistema de transmissão sem capacitores série, estes transitórios sempre decaem com uma
constante de tempo dada pela razão da indutância pela resistência do sistema. Em redes
elétricas contendo capacitores série, as correntes originadas por estes distúrbios são
oscilatórias podendo conter componentes em diversas freqüências subsíncronas. Se o
complemento de uma destas freqüências ( n
s ) for próximo de alguma das freqüências
naturais do eixo turbina-gerador, torques muito elevados podem ser originados, amplificando
o efeito dos torques originais. Os torques transitórios resultantes provocam esforços torsionais
nos eixos dos turbo-geradores, podendo contribuir para a perda de vida útil por fadiga
mecânica, principalmente quando capacitores série estão presentes. Este tipo de fenômeno é
resultado de grandes perturbações no sistema, tais como o chaveamento de linhas de
transmissão e capacitores, curtos-circuitos, etc., e, portanto, não pode ser avaliado a partir de
modelos lineares. Nestes casos, simulações no domínio do tempo utilizando programas do
tipo EMTP (Electromagnetic Transients Program) são mais apropriadas.
COE754 – Dinâmica e Controle de Sistemas de Potência
XI-14
UNIVERSIDADE FEDERAL DO RIO DE JANEIRO
COPPE – Programa de Engenharia Elétrica
Prof. Glauco Nery Taranto, Ph.D.
[email protected]
Centro de Tecnologia – Ilha do Fundão
tel. 2562-8615 fax: +2562-8628
XII. REFERÊNCIAS
[1]
Edward W. Kimbark – Power System Stability: Synchronous Machines, Dover
Publications Inc., New York, USA, 1968, republication of the book by John Wiley &
Sons, Inc., New York, USA, 1956.
[2]
Paul C. Krause – Analysis of Electric Machinery, McGraw-Hill International Editions,
Singapore, 1987.
[3]
Murray R. Spiegel – Manual de Fórmulas e Tabelas Matemáticas, Coleção Schaum,
McGraw-Hill do Brasil Ltda., São Paulo, SP, 1973
[4]
Prabha Kundur – Power System Stability and Control, EPRI Power System
Engineering Series, McGraw-Hill, Inc., New York, USA, 1994.
[5]
P. M. Anderson, B. L. Agrawal, J. E. Van Ness – Subsynchronous Resonance in
Power Systems, IEEE Press, New York, USA, 1990.
[6]
Gilbert Strang – Introduction to Applied Mathematics, Wellesley-Cambridge Press,
Massachusetts, USA, 1986.
[7]
W. H. Press, B. P. Flannery, S. A. Teukolsky & W. T. Vetterling – Numerical
Recipes – The Art of Scientific Computing, Cambridge University Press, Cambridge,
UK, 1986.
[8]
J. Arrillaga, C. P. Arnold & B. J. Harker – Computer Modelling of Electrical Power
Systems, John Wiley & Sons, Chichester, UK, 1983.
[9]
Katsuhiko Ogata – Engenharia de Controle Moderno, 2a edição, Prentice-Hall do
Brasil, Rio de Janeiro, RJ, 1993.
[10] Pierre R. Bélanger – Control Engineering: a Modern Approach, Saunders College
Publishing, Harcourt Brace and Co., Fort Worth, USA, 1995.
[11] J. H. Wilkinson – The Algebraic Eigenvalue Problem, Oxford Science Publications,
Clarendon Press, Oxford, UK, 1965.
[12] IEEE Committee Report – “Excitation System Models for Power System Stability
Studies”, IEEE Trans. on Power Apparatus and Systems, vol. PAS-100, pp. 494-509,
February, 1981.
[13] IEEE Standard, IEEE Standard Definitions for Excitation Systems for Synchronous
Machines, IEEE Std. 421.1-2007.
[14] IEEE Standard, IEEE Guide for Identification, Testing, and Evaluation of the
Dynamic Performance of Excitation Control Systems, IEEE Std. 421.2-1990.
[15] IEEE Standard, IEEE Standard for High-Potential Test Requirements for Excitation
Systems for Synchronous Machines, IEEE Std. 421.3-1997.
[16] IEEE Standard, IEEE Guide for the Preparation of Excitation System Specifications,
IEEE Std. 421.4-2004.
[17] IEEE Standard, IEEE Recommended Practice for Excitation System Models for Power
System Stability Studies, IEEE Std. 421.5-2005.
COE754 – Dinâmica e Controle de Sistemas de Potência
XII-1
UNIVERSIDADE FEDERAL DO RIO DE JANEIRO
COPPE – Programa de Engenharia Elétrica
Prof. Glauco Nery Taranto, Ph.D.
[email protected]
Centro de Tecnologia – Ilha do Fundão
tel. 2562-8615 fax: +2562-8628
[18] F. P. De Mello – Dinâmica das Máquinas Elétricas II, Edições UFSM, Santa Maria,
RS, 1983.
[19] A. L. Farias & R. Jovita, “Limitações Operativas Causadas por Auto-Excitação em
Máquinas Síncronas,” Anais do XVI SNPTEE, Campinas, SP, 2002.
[20] X. Vieira Filho, “Operação de Sistemas de Potência com Controle Automático de
Geração,” Editora Campus, 1984.
[21] Manual do Programa ANATEM (Análise de Transitórios Eletromecânicos) do CEPEL.
[22] J. P. Paul, J. Y. Léost & J. M. Tesseron – “Survey of the Secondary Voltage Control
in France: Present Realization and Investigations”, IEEE Transactions on Power
Systems, Vol. 2, No. 2, pp. 505-511, May 1987.
[23] S. Corsi, P. Marannino, N. Losignore, G. Moreschini & G. Piccini – “Coordination
between the Reactive Power Scheduling Function and the Hierarchical Voltage Control
of the EHV ENEL System,” IEEE Transactions on Power Systems, Vol. 10, No. 2, pp.
686-694, May 1995.
[24] J. Machowski, J. W. Bialek & J. R. Bumby – “Power System Dynamics and
Stability,” John Wiley & Sons, 1997.
[25] W. D. Stevenson Jr. – “Elementos de Análise de Sistemas de Potência,” McGraw-Hill,
2ª. Edição em Português.
[26] R. Mohan Mathur & R. K. Varma – “Thyristor-Based FACTS Controllers for
Electrical Transmission Systems,” IEEE Press Series on Power Engineering, WileyInterscience, 2002.
[27] Carson W. Taylor – “Power System Stability and Control”, EPRI Power System
Engineering Series, McGraw-Hill, Inc., New York, USA, 1994.
[28] J. W. Balance & S. Goldberg, “Subsynchronous Resonance in Series Compensated
Transmission Lines”, IEEE Transactions on Power Apparatus and Systems, Vol. PAS92, pp. 1649-1658, Sep/Oct 1973.
[29] IEEE Subsynchronous Resonance Working Group, “Proposed Terms and
Definitions for Subsynchronous Oscillations”, IEEE Transactions on Power Apparatus
and Systems, Vol. PAS-99, No.2, pp. 506-511, Mar/Apr 1980.
[30] IEEE Subsynchronous Resonance Working Group, “Terms, Definitions and
Symbols for Subsynchronous Oscillations”, IEEE Transactions on Power Apparatus
and Systems, Vol. PAS-104, No.6, pp. 1326-1334, June 1985.
[31] K. R. Padiyar, Analysis of Subsynchronous Resonance in Power Systems, Norwell,
Kluwer Academic Publishers, 1999.
[32] R. H. Park, “Two Reaction Theory of Synchronous Machines – Part 1”, AIEEE
Transactions on Power Apparatus and Systems, Vol. 48, pp. 716-730, 1929.
[33] R. H. Park, “Two Reaction Theory of Synchronous Machines – Part 2”, AIEEE
Transactions on Power Apparatus and Systems, Vol. 52, pp. 352-355, 1933.
[34] M. A. Tomim, “Análise de Estabilidade em Regime Permanente de Sistemas Elétricos
Susceptíveis a Ressonância Subsíncrona”, Dissertação de Mestrado, Universidade
Federal de Itajubá, 2004.
COE754 – Dinâmica e Controle de Sistemas de Potência
XII-2
UNIVERSIDADE FEDERAL DO RIO DE JANEIRO
COPPE – Programa de Engenharia Elétrica
Prof. Glauco Nery Taranto, Ph.D.
[email protected]
Centro de Tecnologia – Ilha do Fundão
tel. 2562-8615 fax: +2562-8628
[35] F. C. Jusan, “Análise Linear de Oscilações Subsíncronas em Sistemas Elétricos de
Potência”, Dissertação de Mestrado, COPPE/UFRJ, 2007.
COE754 – Dinâmica e Controle de Sistemas de Potência
XII-3
UNIVERSIDADE FEDERAL DO RIO DE JANEIRO
COPPE – Programa de Engenharia Elétrica
Prof. Glauco Nery Taranto, Ph.D.
[email protected]
Centro de Tecnologia – Ilha do Fundão
tel. 2562-8615 fax: +2562-8628
XIII. APÊNDICE
XIII.1 SISTEMAS DINÂMICOS
A Figura 37 representa um sistema mecânico a ser modelado, composto de uma massa que
está ligada a um referencial fixo através de uma mola e de um amortecedor.
K
f
M
B
x(t)
Figura 37. Sistema Massa-Mola
De acordo com a segunda lei de Newton, as seguintes relações são válidas:
d 2x
dx
B
K
1
M 2
f t Kx B
x
x
x
f t
(VII.1)
dt
dt
M
M
M
A inércia do sistema mecânico, associada à massa no caso de movimento de translação, faz
com que a posição do objeto não possa variar instantaneamente. Para expressar
matematicamente esta característica, torna-se necessário o uso de equações diferenciais e,
portanto, a posição do corpo passa a ser uma função do tempo que atende à equação (VII.1).
A Figura 38 representa um circuito RLC série, em que a tensão no capacitor é a variável de
interesse.
bg
bg
R
L
u
C
y
Figura 38. Circuito RLC Série
Para este circuito pode-se escrever que
di
L
Ri y u
dt
dy
i C
dt
R|
S|
T
LC
d2 y
dt 2
RC
dy
dt
y
u
(VII.2)
resultando em uma equação diferencial com a mesma forma geral da equação (VII.1).
No caso do circuito elétrico, a corrente sobre o indutor não pode variar instantaneamente,
assim como a tensão sobre o capacitor. São estas características que fazem com que o modelo
matemático do sistema seja uma equação diferencial.
A Figura 39 apresenta dois gráficos de soluções típicas das equações (VII.1) ou (VII.2),
dependendo do valor dos parâmetros M, B e K ou L, R e C, respectivamente.
COE754 – Dinâmica e Controle de Sistemas de Potência
XIII-1
UNIVERSIDADE FEDERAL DO RIO DE JANEIRO
COPPE – Programa de Engenharia Elétrica
Prof. Glauco Nery Taranto, Ph.D.
[email protected]
Centro de Tecnologia – Ilha do Fundão
tel. 2562-8615 fax: +2562-8628
resposta ao degrau
2
1.8
1.6
1.4
1.2
1
0.8
0.6
0.4
0.2
0
0
0.005
0.01
0.015
0.02
0.025
0.03
tempo (s)
Figura 39. Resposta ao Degrau do Sistema de 2a Ordem
A Figura 3.a mostra diversos fenômenos dinâmicos que aparecem em sistemas de potência e
suas respectivas constantes de tempo.
Descargas Atmosféricas
Chaveamentos
Ress. Subsíncrona
Est. Trans./Dinâmica
Din. Longo Prazo
CAG
Demanda
10e-7
10e-6 10e-5 10e-4 10e-3 10e-2
1 grau (60Hz)
0.1
1 ciclo
1.0
10
100
10e3
10e-4 10e-5
(segundos)
1 minuto
Figura 3.a. Fenômenos Dinâmicos em Sistemas de Potência
COE754 – Dinâmica e Controle de Sistemas de Potência
XIII-2